TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025171691
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024077283
出願日
2024-05-10
発明の名称
衛星航法受信機
出願人
イエローテイル・ナビゲーション株式会社
代理人
主分類
G01S
19/37 20100101AFI20251113BHJP(測定;試験)
要約
【課題】 異なる測位方式,計算条件又は計算パラメータによる計算結果を1台の衛星航法受信機により同時に取得する。
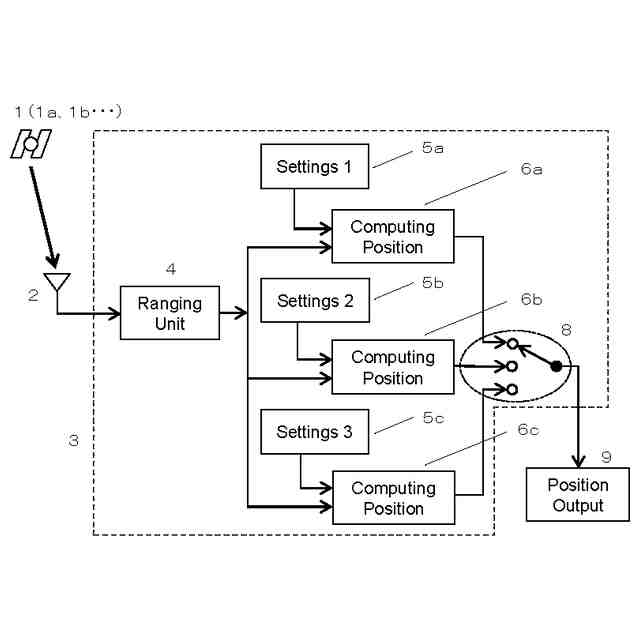
【解決手段】 米国によるGPSや日本の準天頂衛星システムを含む衛星航法システムにより自己の位置を測定する衛星航法受信機について,測位計算のための測位方式,計算条件及び計算パラメータについて複数の組合せを保持することとして,その各々を,単一の測距処理回路による一組の距離の測定値に適用して測位計算を実行し,得られた全ての計算結果を出力することで,異なる測位方式,計算条件又は計算パラメータによる計算結果を1台の衛星航法受信機により同時に取得できるようにする。
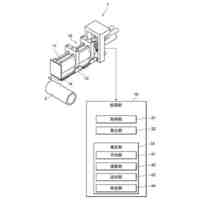
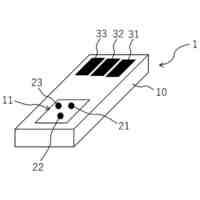
【選択図】 図1
特許請求の範囲
【請求項1】
複数の航法衛星が送信する測位信号を受信してそれらとの間の距離を測定し,得られた距離の測定値を用いて自己の位置を計算する衛星航法受信機において,
前記自己の位置を計算する際の,測位方式,計算条件及び計算パラメータについて複数の組合せを保持し,
その各々を適用して自己の位置を計算して,
得られた全ての計算結果を出力することを特徴とする,衛星航法受信機。
続きを表示(約 910 文字)
【請求項2】
前記計算結果を出力する際に,
各々の計算結果が,前記測位方式,計算条件及び計算パラメータの組合せのいずれに対応するものであるかを識別する情報を付して出力することを特徴とする,請求項1に記載の衛星航法受信機。
【請求項3】
前記計算結果を出力する際に,
各々の計算結果が,前記測位方式,計算条件及び計算パラメータの組合せのいずれに対応するかによって,あらかじめ割り当てられた出力先通信回線に出力することを特徴とする,請求項1又は請求項2に記載の衛星航法受信機。
【請求項4】
前記出力先通信回線は,物理的に1本の通信回線であるものを,論理的に複数の通信路として区別するものであることを特徴とする,請求項3に記載の衛星航法受信機。
【請求項5】
複数の航法衛星が送信する測位信号を受信してそれらとの間の距離を測定し,得られた距離の測定値を用いて自己の位置を計算する衛星航法受信機において,
前記自己の位置を計算する際の,測位方式,計算条件及び計算パラメータについて複数の組合せを保持し,
その各々を適用して自己の位置を計算して,
得られた全ての計算結果のうちの有効な計算結果について,いずれか一つを選択して出力することを特徴とする衛星航法受信機。
【請求項6】
前記いずれか一つを選択して出力する際に,
出力する計算結果が,前記測位方式,計算条件及び計算パラメータの組合せのいずれに対応するものであるかを識別する情報を付して出力することを特徴とする,請求項5に記載の衛星航法受信機。
【請求項7】
前記いずれか一つを選択して出力する際に,
前記有効な計算結果に含まれる測位精度に関する情報を用いて選択を行うことを特徴とする,請求項5又は請求項6に記載の衛星航法受信機。
【請求項8】
前記いずれか一つを選択して出力する際に,
前記有効な計算結果に含まれる保護レベルを用いて選択を行うことを特徴とする,請求項5又は請求項6に記載の衛星航法受信機。
発明の詳細な説明
【技術分野】
【0001】
この発明は,衛星航法の分野における衛星航法受信機に関するものである。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
人工衛星により位置を測定する衛星航法システムはGNSS(Global Navigation Satellite System)と総称され,その代表例は米国によるGPS(Global Positioning System)である。GNSSは一般に,航法衛星と呼ばれる人工衛星が送信する測位信号を衛星航法受信機により受信し,航法衛星と受信機の間の距離を測定することで,受信機の位置を計算により求める。求められた位置の真の位置に対する誤差を測位誤差といい,測位誤差の統計的な様子を測位精度という。位置を測定することを測位といい,そのための計算処理を測位計算という。
【0003】
衛星航法受信機の位置を計算するためには測位信号を送信している航法衛星の位置を知る必要があるが,このために必要な航法衛星の軌道情報は航法衛星自身が測位信号に重畳して送信する。軌道情報は予測により作成されていることから,これにより計算される航法衛星の位置は数メートル程度までの誤差を含んでおり,これは航法衛星の位置誤差として受信機の位置の計算の際に測位誤差の要因になる。
【0004】
航法衛星が測位信号を送信するタイミングはあらかじめ決まっており,航法衛星は自身が備える時計の時刻にもとづいて測位信号を送信する。この時計としては高精度な原子時計が使用されるが,ごくわずかな時刻のずれは避けられないため,衛星航法受信機は航法衛星の時計が指す時刻の情報を必要する。この時計の情報は,航法衛星自身が測位信号に重畳して送信する。時計の情報は予測により作成されていることから,これにより計算される測位信号の送信タイミングは距離に換算して数メートル程度までに相当する誤差を含んでおり,これは航法衛星の時計誤差として受信機の位置の計算の際に測位誤差の要因になる。
【0005】
測位信号が地上に到達するまでの間には,上空の大気による伝搬遅延や地上付近における反射波の混入など,さまざまな要因により距離の測定誤差を生じる。これらも全て,衛星航法受信機の位置の計算の際に測位誤差の要因になる。
【0006】
測位誤差を低減するため,地上に固定された基準局に受信機を設置して,これにより測定した距離から,さまざまな誤差要因により生じる距離の測定誤差に対する補正情報を生成し,これをユーザに対して提供することで,ユーザ局において測定した距離を補正情報により補正し,ユーザ局における測位誤差を抑制することが行われている。この方式はディファレンシャルGPS(DGPS:Differential GPS)と呼ばれる。DGPSと区別する場合は,補正情報を適用せずにユーザ局の位置を計算する方式を単独測位という。
【0007】
単独測位とDGPSのいずれにおいても,測位誤差をさらに低減するためにさまざまな手法が開発されており,衛星航法受信機が自己の位置を計算する際には,多くの計算条件や計算パラメータが付随する。一般に,衛星航法受信機にはこうした計算条件や計算パラメータを設定できるようになっており,受信機は設定された計算条件及び計算パラメータを適用した計算により得られた位置を出力する。受信機に設定できる計算条件や計算パラメータの種類や範囲,また具体的な設定の方法は,受信機の機種によって決まっている。
【0008】
DGPSを行う衛星航法受信機では,DGPSを正常に実行できればDGPSにより求められた位置,DGPSを実行できなければ単独測位による位置を出力するものがある。この出力の際には,単独測位とDGPSのどちらの方式による結果であるかの識別情報が付されるのが普通である。
【0009】
衛星航法受信機の出力には,計算により得られた位置に加えて,測位精度に関する情報や保護レベルが付随するのが普通である。測位精度に関する情報は,上空の航法衛星の配置や,航法衛星の仰角等によりおおよそ予測される測距精度にもとづいて計算される。保護レベルは衛星航法受信機による位置出力の完全性を確保するために用いられる指標であり,一般には測位誤差の99.99999%信頼区間に対応する。
【0010】
ところで,衛星航法受信機は,測位方式,計算条件又は計算パラメータの違いにより,位置出力に差異を生じ,測位誤差や測位精度が異なる。これらはあらかじめ設定したうえで受信機を動作させるものであるから,異なる測位方式,計算条件又は計算パラメータによる計算結果を同時に取得したい場合には,設定を変えた複数の受信機を並行して動作させることがある。この場合は,受信機の動作条件を同一にするために,同一のアンテナによる受信信号を当該複数の受信機に分配するのが一般的である。あるいは,1台の受信機を使用して,設定を変えながら繰り返し動作させることもあり,この場合は,例えば衛星航法システムが送信した測位信号をそのまま記録できるRFレコーダを使用して,これを複数回再生して衛星航法受信機に入力する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精機株式会社
検出装置
17日前
個人
採尿及び採便具
23日前
個人
計量機能付き容器
12日前
個人
高精度同時多点測定装置
1か月前
株式会社カクマル
境界杭
2日前
株式会社ミツトヨ
測定器
29日前
甲神電機株式会社
電流検出装置
17日前
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
12日前
ローム株式会社
半導体装置
1か月前
ローム株式会社
半導体装置
1か月前
大和製衡株式会社
組合せ計量装置
26日前
大和製衡株式会社
組合せ計量装置
26日前
日本信号株式会社
距離画像センサ
15日前
個人
計量具及び計量機能付き容器
12日前
個人
システム、装置及び実験方法
1か月前
愛知電機株式会社
軸部材の外観検査装置
26日前
愛知時計電機株式会社
ガスメータ
29日前
日本特殊陶業株式会社
ガスセンサ
10日前
個人
非接触による電磁パルスの測定方法
15日前
双庸電子株式会社
誤配線検査装置
18日前
株式会社不二越
X線測定装置
15日前
トヨタ自動車株式会社
測定システム
1か月前
キーコム株式会社
画像作成システム
2日前
株式会社デンソー
電流センサ
1か月前
個人
液位検視及び品質監視システム
10日前
日東精工株式会社
振動波形検査装置
18日前
日本特殊陶業株式会社
センサ
29日前
株式会社マグネア
磁界検出素子
15日前
アンリツ株式会社
X線検査装置
29日前
株式会社エルメックス
希釈液収容容器
12日前
理研計器株式会社
ガス検知装置
2日前
株式会社電巧社
試験装置及び試験方法
18日前
住友化学株式会社
電気化学センサ
23日前
日本特殊陶業株式会社
化学センサ
17日前
株式会社不二越
X線測定システム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ