TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025138089
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024036884
出願日
2024-03-11
発明の名称
立体物印刷装置および印刷方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B41J
2/01 20060101AFI20250917BHJP(印刷;線画機;タイプライター;スタンプ)
要約
【課題】印刷品質を向上させる。
【解決手段】立体物印刷装置は、ワークに向けて液体を吐出する液体吐出ヘッドと、液体吐出ヘッドを支持する先端部を有し、ワークに対する液体吐出ヘッドの相対的な位置を変化させる多関節ロボットと、液体吐出ヘッドの走査方向の動作を検出する検出部と、液体吐出ヘッドおよび多関節ロボットの動作を制御する制御部と、を備え、制御部は、検出部の検出結果に基づいて、液体吐出ヘッドの速度に関する速度情報を取得し、速度情報に基づいて、液体吐出ヘッドの吐出タイミングを制御する。
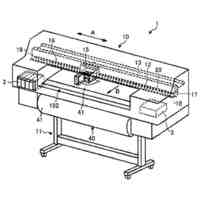
【選択図】図4
特許請求の範囲
【請求項1】
ワークに向けて液体を吐出する液体吐出ヘッドと、
前記液体吐出ヘッドを支持する先端部を有し、前記ワークに対する前記液体吐出ヘッドの相対的な位置を変化させる多関節ロボットと、
前記液体吐出ヘッドの走査方向の動作を検出する検出部と、
前記液体吐出ヘッドおよび前記多関節ロボットの動作を制御する制御部と、を備え、
前記制御部は、
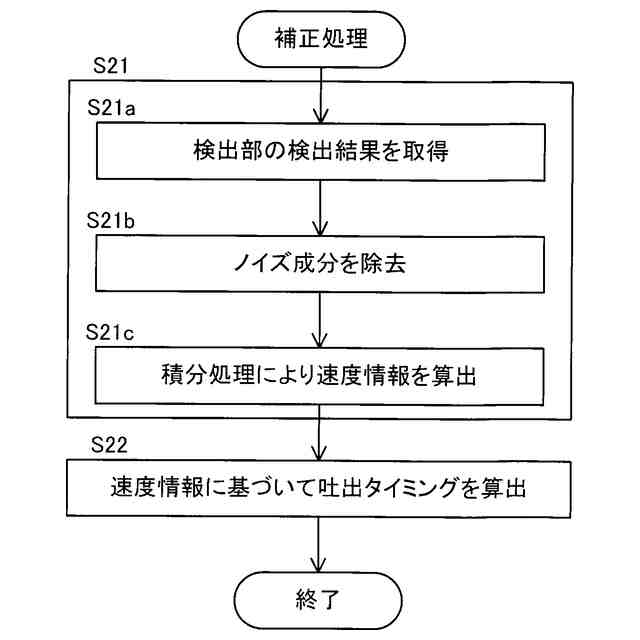
前記検出部の検出結果に基づいて、前記液体吐出ヘッドの速度に関する速度情報を取得し、
前記速度情報に基づいて、前記液体吐出ヘッドの吐出タイミングを制御する、
ことを特徴とする立体物印刷装置。
続きを表示(約 1,500 文字)
【請求項2】
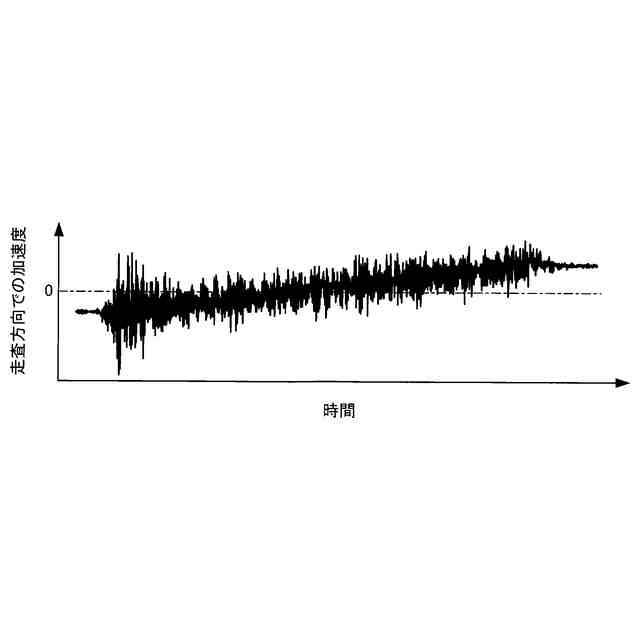
前記検出部は、前記液体吐出ヘッドの走査方向の加速度を検出し、
前記制御部は、
前記検出部の検出結果に基づいて前記液体吐出ヘッドの加速度に関する加速度情報を取得し、
前記加速度情報に基づいて前記速度情報を取得し、
前記速度情報に基づいて前記液体吐出ヘッドの吐出タイミングを制御する、
請求項1に記載の立体物印刷装置。
【請求項3】
前記制御部は、
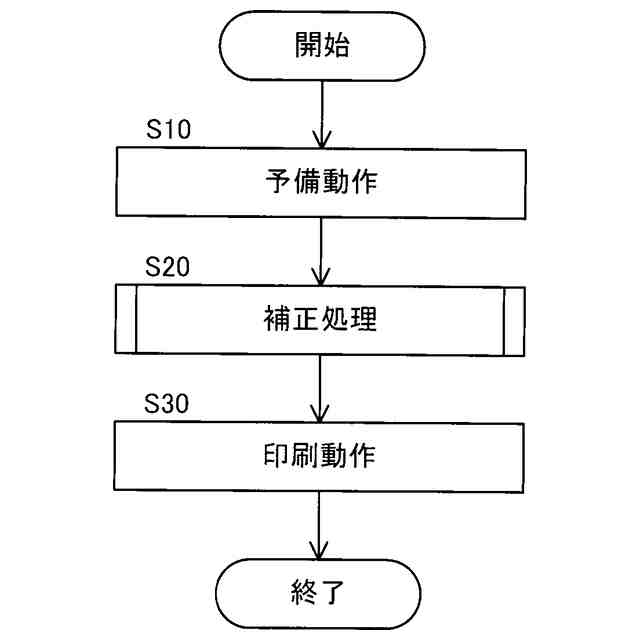
印刷経路に沿って前記液体吐出ヘッドを走査させる予備動作と、前記印刷経路に沿って前記液体吐出ヘッドを走査させ、かつ、前記液体吐出ヘッドから前記ワークに向けて液体を吐出させる印刷動作と、を実行可能であり、
前記予備動作の実行中における前記加速度情報に基づいて、前記印刷動作の実行中における前記液体吐出ヘッドの吐出タイミングを制御する、
請求項2に記載の立体物印刷装置。
【請求項4】
前記制御部は、
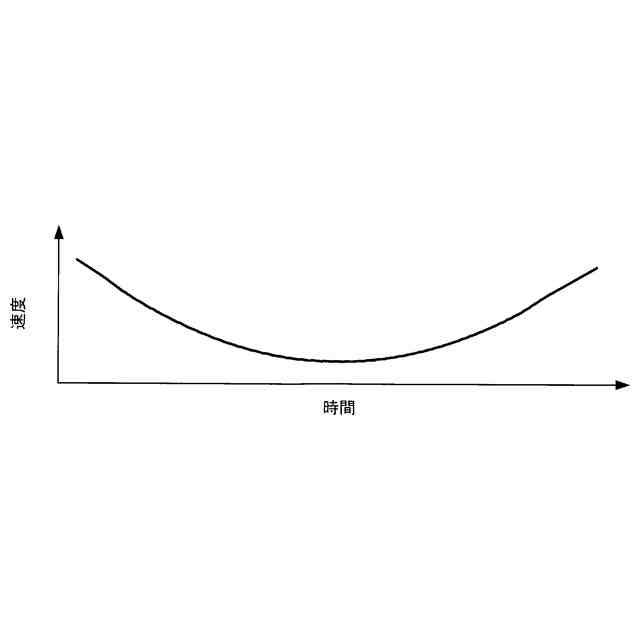
前記加速度情報に基づいて、前記印刷経路に沿って移動させた前記液体吐出ヘッドの走査方向での速度である走査速度を算出し、
前記走査速度に基づいて、前記印刷動作の実行中における前記液体吐出ヘッドの吐出タイミングを制御する、
請求項3に記載の立体物印刷装置。
【請求項5】
前記制御部は、
前記加速度情報に対してハイパスフィルターを用いた演算処理を行うことにより、前記走査速度を算出する、
請求項4に記載の立体物印刷装置。
【請求項6】
前記検出部は、前記液体吐出ヘッドに加わる角速度を検出可能であり、
前記制御部は、
前記検出部の検出結果に基づいて前記液体吐出ヘッドの角速度に関する角速度情報を取得し、
前記角速度情報および前記速度情報に基づいて前記液体吐出ヘッドの吐出タイミングを制御する、
請求項2から5のいずれか1項に記載の立体物印刷装置。
【請求項7】
前記制御部は、
前記角速度情報に基づいて前記液体吐出ヘッドに加わる重力加速度を算出し、
前記加速度情報および前記重力加速度に基づいて、前記液体吐出ヘッドの走査方向での速度を算出する、
請求項6に記載の立体物印刷装置。
【請求項8】
前記多関節ロボットに設けられ、前記多関節ロボットの動作を検出する動作検出部をさらに備え、
前記制御部は、
前記動作検出部の検出結果に基づいて、前記液体吐出ヘッドから液体を吐出させる開始タイミングを決定する、
請求項1から5のいずれか1項に記載の立体物印刷装置。
【請求項9】
前記制御部は、
前記動作検出部の検出結果に基づいて、前記速度情報を取得するタイミングを決定する、
請求項8に記載の立体物印刷装置。
【請求項10】
ワークに向けて液体を吐出する液体吐出ヘッドと、
前記液体吐出ヘッドを支持する先端部を有し、前記ワークに対する前記液体吐出ヘッドの相対的な位置を変化させる多関節ロボットと、
前記液体吐出ヘッドの走査方向の動作を検出する検出部と、を備える立体物印刷装置を用いた印刷方法であって、
前記検出部の検出結果に基づいて、前記液体吐出ヘッドの速度に関する速度情報を取得する工程と、
前記速度情報に基づいて、前記液体吐出ヘッドの吐出タイミングを制御する工程と、を含む、
ことを特徴とする印刷方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、立体物印刷装置および印刷方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
立体的なワークの表面にインクジェット方式により印刷を行う立体物印刷装置が知られている。例えば、特許文献1に記載の装置は、ロボットアームと、ロボットアームの先端に固定されるプリントヘッドと、を有し、プリントヘッドからのインクによる画像を対象物に印刷する。
【先行技術文献】
【特許文献】
【0003】
特開2014-050832号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の装置では、ロボットアームの動作誤差に起因してプリントヘッドから吐出されるインクの着弾位置にずれが生じてしまい、この結果、印刷品質の低下を招く虞がある。
【課題を解決するための手段】
【0005】
本開示の立体物印刷装置の一態様は、ワークに向けて液体を吐出する液体吐出ヘッドと、前記液体吐出ヘッドを支持する先端部を有し、前記ワークに対する前記液体吐出ヘッドの相対的な位置を変化させる多関節ロボットと、前記液体吐出ヘッドの走査方向の動作を検出する検出部と、前記液体吐出ヘッドおよび前記多関節ロボットの動作を制御する制御部と、を備え、前記制御部は、前記検出部の検出結果に基づいて、前記液体吐出ヘッドの速度に関する速度情報を取得し、前記速度情報に基づいて、前記液体吐出ヘッドの吐出タイミングを制御する。
【0006】
本開示の印刷方法の一態様は、ワークに向けて液体を吐出する液体吐出ヘッドと、前記液体吐出ヘッドを支持する先端部を有し、前記ワークに対する前記液体吐出ヘッドの相対的な位置を変化させる多関節ロボットと、前記液体吐出ヘッドの走査方向の動作を検出する検出部と、を備える立体物印刷装置を用いた印刷方法であって、前記検出部の検出結果に基づいて、前記液体吐出ヘッドの速度に関する速度情報を取得する工程と、前記速度情報に基づいて、前記液体吐出ヘッドの吐出タイミングを制御する工程と、を含む。
【図面の簡単な説明】
【0007】
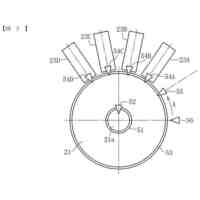
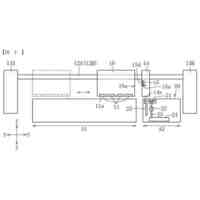
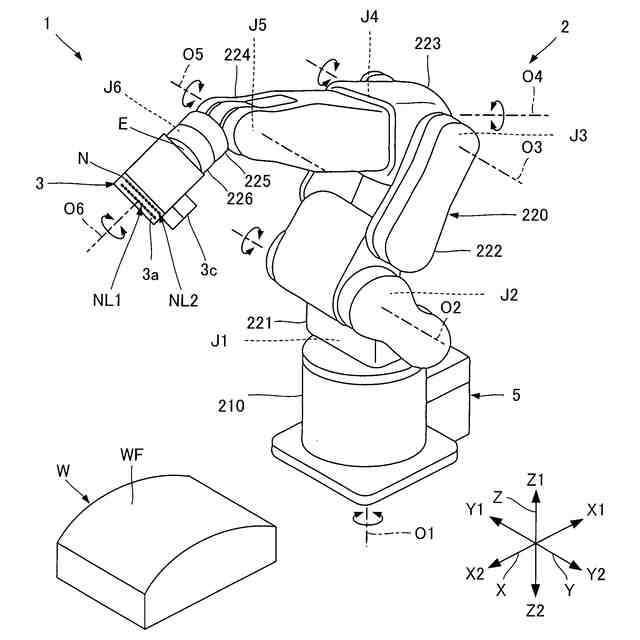
第1実施形態に係る立体物印刷装置の概略を示す斜視図である。
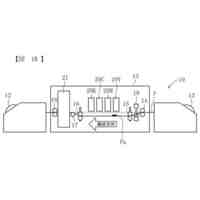
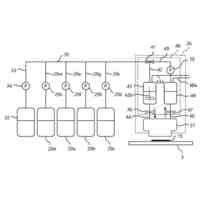
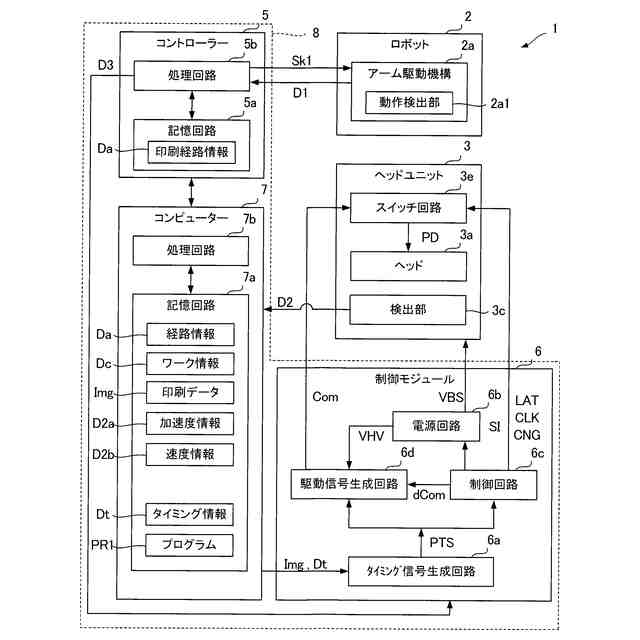
第1実施形態に係る立体物印刷装置の電気的な構成を示すブロック図である。
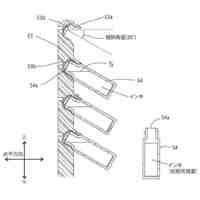
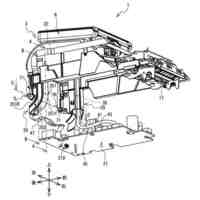
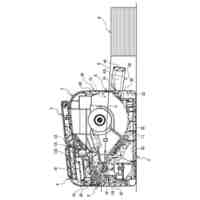
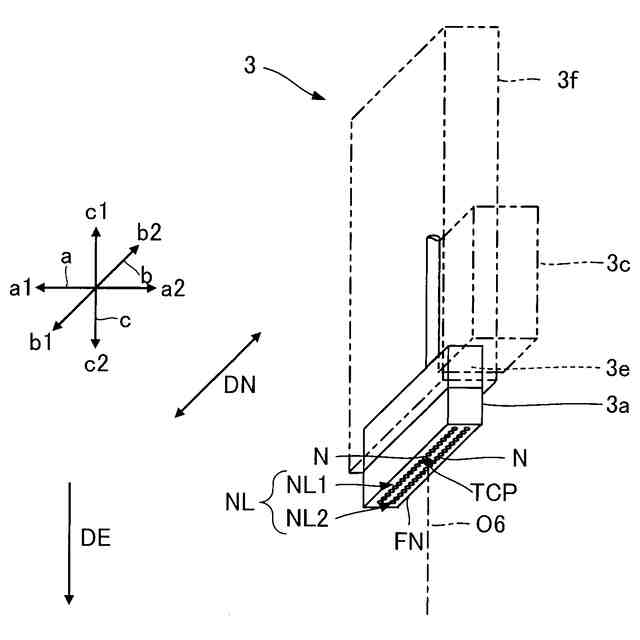
第1実施形態のヘッドユニットの概略構成を示す斜視図である。
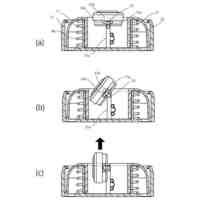
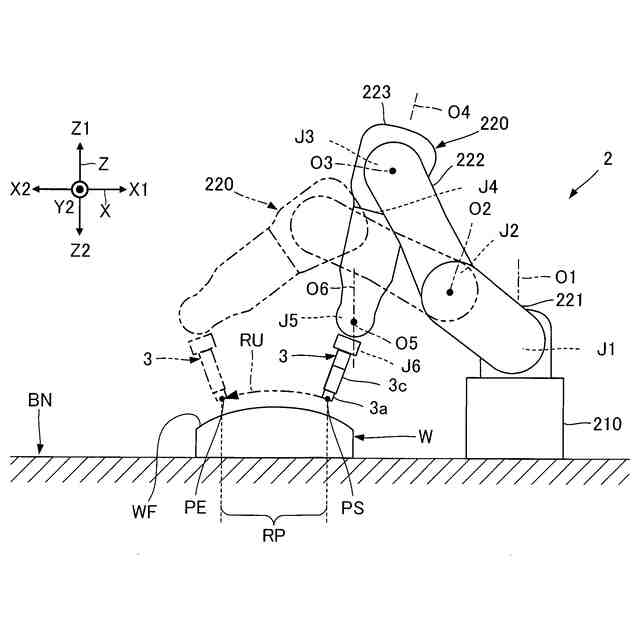
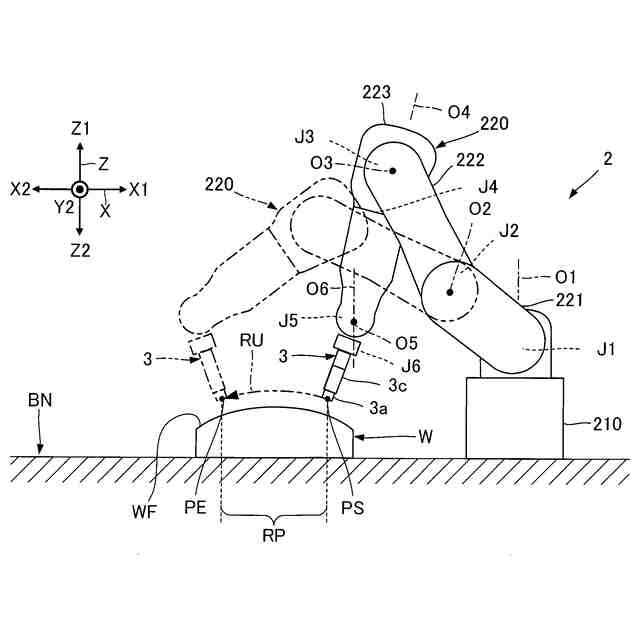
印刷動作の一例を示す図である。
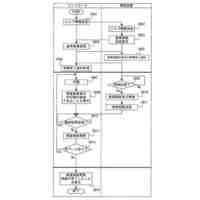
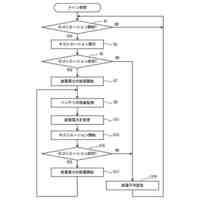
第1実施形態に係る印刷方法を示すフローチャートである。
第1実施形態における補正処理の流れを示すフローチャートである。
予備動作の実行中における加速度情報の一例を示す図である。
図7に示す加速度情報の示す加速度を単に積分処理した場合の値を示す図である。
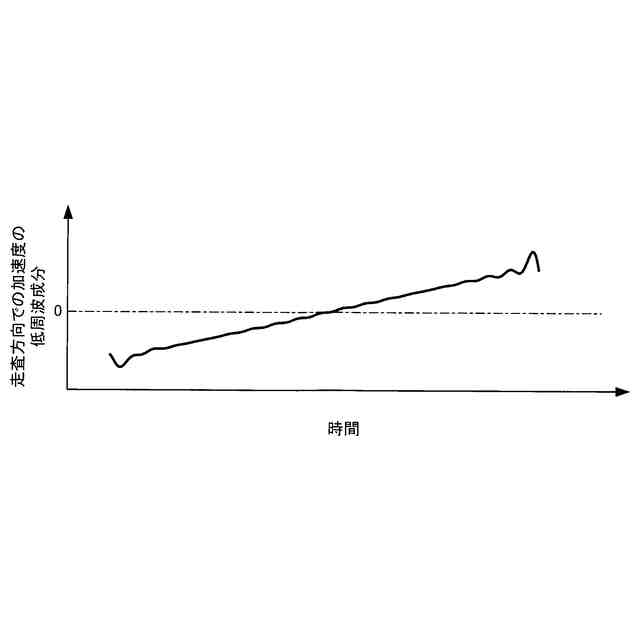
図7に示す加速度情報の低周波成分を示す図である。
図7に示す加速度情報の高周波成分を示す図である。
図10に示す高周波成分に基づく速度情報の一例を示す図である。
図11に示す速度情報に基づく吐出タイミングの一例を示す図である。
第2実施形態に係る立体物印刷装置の電気的な構成を示すブロック図である。
第2実施形態における補正処理の流れを示すフローチャートである。
予備動作の実行中における加速度情報の一例を示す図である。
予備動作の実行中に角速度情報の一例を示す図である。
重力加速度成分を減算した加速度情報の一例を示す図である。
図17に示す加速度情報の低周波成分を示す図である。
図17に示す加速度情報の高周波成分を示す図である。
図19に示す高周波成分に基づく速度情報の一例を示す図である。
図20に示す速度情報に基づく吐出タイミングの一例を示す図である。
【発明を実施するための形態】
【0008】
以下、添付図面を参照しながら本開示に係る好適な実施形態を説明する。なお、図面において各部の寸法および縮尺は実際と適宜に異なり、理解を容易にするために模式的に示している部分もある。また、本開示の範囲は、以下の説明において特に本開示を限定する旨の記載がない限り、これらの形態に限られない。
【0009】
以下では、説明の便宜上、互いに交差するX軸、Y軸およびZ軸を適宜に用いて説明を行う。また、以下では、X軸に沿う一方向がX1方向であり、X1方向と反対の方向がX2方向である。同様に、Y軸に沿って互いに反対の方向がY1方向およびY2方向である。また、Z軸に沿って互いに反対の方向がZ1方向およびZ2方向である。
【0010】
ここで、X軸、Y軸およびZ軸は、後述のロボット2が設置される空間に設定されるワールド座標系の座標軸に相当する。典型的には、Z軸が鉛直な軸であり、Z2方向が鉛直方向での下方向に相当する。当該ワールド座標系には、ロボット2の後述の基部210の位置を基準とするベース座標系がキャリブレーションにより対応付けられる。以下では、便宜上、ワールド座標系をロボット座標系として用いてロボット2の動作を制御する場合が例示される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
箔熱転写装置
16日前
シヤチハタ株式会社
印判
4か月前
東レ株式会社
凸版印刷版原版
9か月前
三菱製紙株式会社
感熱記録材料
10か月前
シヤチハタ株式会社
反転式印判
8か月前
独立行政法人 国立印刷局
印刷物
6か月前
キヤノン株式会社
記録装置
9日前
三光株式会社
感熱記録材料
5か月前
日本製紙株式会社
感熱記録体
7か月前
株式会社リコー
液体吐出装置
5か月前
独立行政法人 国立印刷局
記録媒体
8か月前
独立行政法人 国立印刷局
貼付装置
1か月前
株式会社リコー
液体吐出装置
4か月前
株式会社リコー
液体吐出装置
7か月前
独立行政法人 国立印刷局
貼付機構
1か月前
株式会社リコー
液体吐出装置
1か月前
株式会社リコー
液体吐出装置
3か月前
株式会社リコー
液体吐出装置
7か月前
株式会社リコー
液体吐出装置
7か月前
株式会社リコー
画像形成装置
16日前
株式会社リコー
液体吐出装置
4か月前
キヤノン株式会社
画像形成装置
7か月前
キヤノン株式会社
画像形成装置
7か月前
キヤノン株式会社
画像記録装置
9日前
ブラザー工業株式会社
プリンタ
5か月前
理想科学工業株式会社
印刷装置
6か月前
キヤノン株式会社
印刷システム
6か月前
キヤノン株式会社
画像形成装置
4か月前
キヤノン株式会社
情報処理装置
8か月前
ブラザー工業株式会社
プリンタ
5か月前
ブラザー工業株式会社
プリンタ
3か月前
ブラザー工業株式会社
プリンタ
8か月前
キヤノン株式会社
画像形成装置
6か月前
ブラザー工業株式会社
液体吐出ヘッド
9日前
キヤノン株式会社
画像処理装置
3か月前
キヤノン株式会社
画像形成装置
7か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ