TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025089485
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2025051131,2023206837
出願日
2025-03-26,2020-12-03
発明の名称
情報処理装置、情報処理方法、プログラム及び記憶媒体
出願人
パイオニア株式会社
代理人
個人
主分類
G01C
21/30 20060101AFI20250605BHJP(測定;試験)
要約
【課題】推定した位置の信頼度を好適に表した指標を算出することが可能な情報処理装置を提供する。
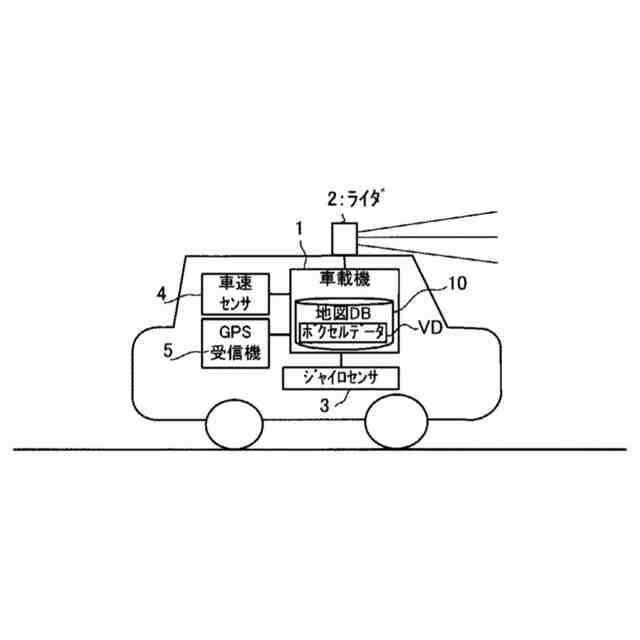
【解決手段】車載機1の制御部15は、ライダ2が出力する点群データを取得する。そして、制御部15は、取得した点群データと、空間を区切った単位領域(ボクセル)ごとの物体の位置情報であるボクセルデータVDとの照合により、点群データを構成する計測点とボクセルの各々との対応付けを行う。制御部15は、ボクセルデータVDが存在するボクセルのいずれかと対応付けられた計測点と、当該単位領域における物体の位置情報とに基づき、ライダ2を備える移動体の位置推定を行う。制御部15は、点群データの計測点の数に対する、ボクセルのいずれかと対応付けられた計測点の数の割合であるDARを用いた、位置推定により得られた位置の信頼度指標を算出する。
【選択図】図12
特許請求の範囲
【請求項1】
計測装置が出力する点群データを取得する取得部と、
前記点群データと、空間を区切った単位領域ごとの物体の位置情報との照合により、前記点群データを構成する計測点と前記単位領域の各々との対応付けを行う対応付け部と、
前記単位領域のいずれかと対応付けられた計測点と、当該単位領域における物体の位置情報とに基づき、前記計測装置を備える移動体の位置推定を行う位置推定部と、
前記点群データの計測点の数に対する、当該計測点のうち前記単位領域と対応付けられた計測点の数の割合を用いた、前記位置推定により得られた位置の信頼度指標を算出する算出部と、
を備える、情報処理装置。
続きを表示(約 1,400 文字)
【請求項2】
前記位置推定部は、前記信頼度指標に基づき、前記位置推定の再実行の要否を判定する、請求項1に記載の情報処理装置。
【請求項3】
前記位置推定部は、前記移動体の位置に関する推定パラメータを所定の探索範囲において探索することで、前記位置推定を行い、
前記位置推定部は、前記位置推定を再実行する際の前記探索範囲を、直前の位置推定により得られた前記推定パラメータの値に基づき決定する、請求項2に記載の情報処理装置。
【請求項4】
前記位置推定部は、前記信頼度指標が所定の閾値以上となる、前記信頼度指標に変動が生じなくなる、又は、前記位置推定の実行回数が所定の上限回数に達する、少なくともいずれかの条件が満たされるまで、前記位置推定を繰り返し実行する、請求項2または3に記載の情報処理装置。
【請求項5】
前記位置推定部は、前記移動体の移動速度に基づき、前記上限回数を決定する、請求項4に記載の情報処理装置。
【請求項6】
前記位置推定部は、前記移動体の位置に関する推定パラメータを所定の探索範囲において探索することで、前記位置推定を行い、
前記位置推定部は、直前の位置推定により得られた前記推定パラメータの値に基づき決定した探索範囲を用いた前記位置推定を、前記信頼度指標に基づき決定した回数だけ実行する、請求項1~3のいずれか一項に記載の情報処理装置。
【請求項7】
前記位置推定部は、前記単位領域のいずれかと対応付けられた計測点と、当該単位領域における物体の位置情報との前記位置推定における照合の度合と、前記割合とに基づき、前記信頼度指標を算出する、請求項1~6のいずれか一項に記載の情報処理装置。
【請求項8】
計測装置が出力する点群データを取得し、
前記点群データと、空間を区切った単位領域ごとの物体の位置情報との照合により、前記点群データを構成する計測点と前記単位領域の各々との対応付けを行い、
前記単位領域のいずれかと対応付けられた計測点と、当該単位領域における物体の位置情報とに基づき、前記計測装置を備える移動体の位置推定を行い、
前記点群データの計測点の数に対する、当該計測点のうち前記単位領域と対応付けられた計測点の数の割合を用いた、前記位置推定により得られた位置の信頼度指標を算出する、
情報処理方法。
【請求項9】
計測装置が出力する点群データを取得する取得部と、
前記点群データと、空間を区切った単位領域ごとの物体の位置情報との照合により、前記点群データを構成する計測点と前記単位領域の各々との対応付けを行う対応付け部と、
前記単位領域のいずれかと対応付けられた計測点と、当該単位領域における物体の位置情報とに基づき、前記計測装置を備える移動体の位置推定を行う位置推定部と、
前記点群データの計測点の数に対する、当該計測点のうち前記単位領域と対応付けられた計測点の数の割合を用いた、前記位置推定により得られた位置の信頼度指標を算出する算出部
としてコンピュータを機能させるプログラム。
【請求項10】
請求項9に記載のプログラムを記憶した記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置推定において用いる信頼度指標の算出に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来から、レーザスキャナなどの計測装置を用いて計測した周辺物体の形状データを、予め周辺物体の形状が記憶された地図情報と照合(マッチング)することで、車両の自己位置を推定する技術が知られている。例えば、特許文献1には、空間を所定の規則で分割したボクセル中における検出物が静止物か移動物かを判定し、静止物が存在するボクセルを対象として地図情報と計測データとのマッチングを行う自律移動システムが開示されている。また、特許文献2には、ボクセル毎の静止物体の平均ベクトルと共分散行列とを含むボクセルデータとライダが出力する点群データとの照合により自車位置推定を行うスキャンマッチング手法が開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開WO2013/076829
国際公開WO2018/221453
【発明の概要】
【発明が解決しようとする課題】
【0004】
ボクセルデータとライダが出力する点群データとの照合により自車位置推定を行う場合、当該照合の度合を示すスコア値が最大となる推定パラメータを探索する処理が行われる。この探索処理は、所定の処理時間内に完了できるように、探索範囲を限定して行うため、スコア値が最大であっても,局所解に陥ってしまっている可能性がある。また、計測対象の地物に対する他車両によるオクルージョンが発生したときでも、上述のスコア値はあまり悪化しない場合があり、そのような場合には、正確な推定パラメータが算出できていない可能性がある。このように、上述のスコア値では、推定した位置の信頼度を表す指標として不十分な場合があった。
【0005】
本発明は、上記のような課題を解決するためになされたものであり、推定した位置の信頼度を好適に表した指標を算出することが可能な情報処理装置を提供することを主な目的とする。
【課題を解決するための手段】
【0006】
請求項に記載の発明は、情報処理装置であって、計測装置が出力する点群データを取得する取得部と、前記点群データと、空間を区切った単位領域ごとの物体の位置情報との照合により、前記点群データを構成する計測点と前記単位領域の各々との対応付けを行う対応付け部と、前記単位領域のいずれかと対応付けられた計測点と、当該単位領域における物体の位置情報とに基づき、前記計測装置を備える移動体の位置推定を行う位置推定部と、前記点群データの計測点の数に対する、当該計測点のうち前記単位領域と対応付けられた計測点の数の割合を用いた、前記位置推定により得られた位置の信頼度指標を算出する算出部と、を備えることを特徴とする。
【0007】
また、請求項に記載の発明は、情報処理方法であって、計測装置が出力する点群データを取得し、前記点群データと、空間を区切った単位領域ごとの物体の位置情報との照合により、前記点群データを構成する計測点と前記単位領域の各々との対応付けを行い、前記単位領域のいずれかと対応付けられた計測点と、当該単位領域における物体の位置情報とに基づき、前記計測装置を備える移動体の位置推定を行い、前記点群データの計測点の数に対する、当該計測点のうち前記単位領域と対応付けられた計測点の数の割合を用いた、前記位置推定により得られた位置の信頼度指標を算出することを特徴とする。
【0008】
また、請求項に記載の発明は、計測装置が出力する点群データを取得する取得部と、前記点群データと、空間を区切った単位領域ごとの物体の位置情報との照合により、前記点群データを構成する計測点と前記単位領域の各々との対応付けを行う対応付け部と、前記単位領域のいずれかと対応付けられた計測点と、当該単位領域における物体の位置情報とに基づき、前記計測装置を備える移動体の位置推定を行う位置推定部と、前記点群データの計測点の数に対する、当該計測点のうち前記単位領域と対応付けられた計測点の数の割合を用いた、前記位置推定により得られた位置の信頼度指標を算出する算出部としてコンピュータを機能させるプログラムであることを特徴とする。
【図面の簡単な説明】
【0009】
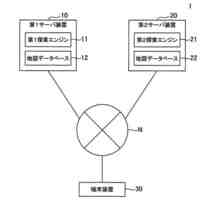
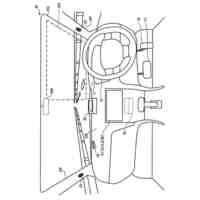
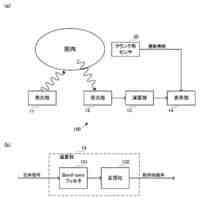
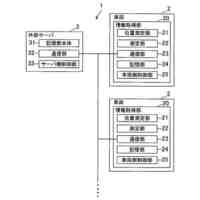
運転支援システムの概略構成図である。
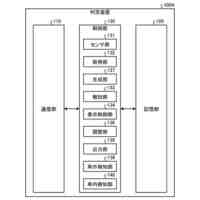
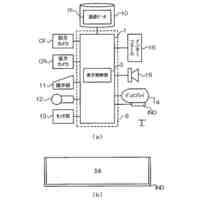
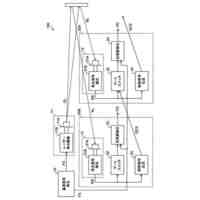
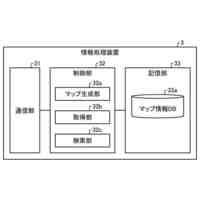
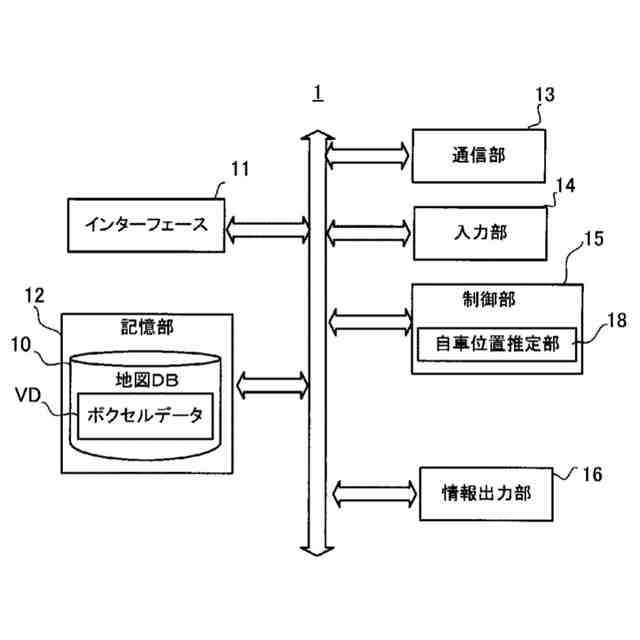
車載機の機能的構成を示すブロック図である。
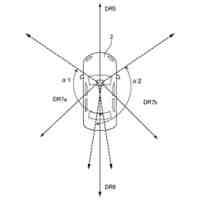
状態変数ベクトルを2次元直交座標で表した図である。
ボクセルデータの概略的なデータ構造の一例を示す。
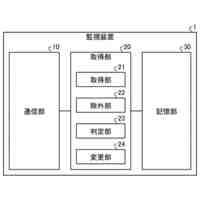
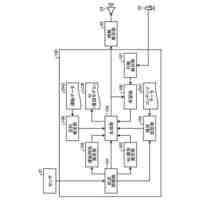
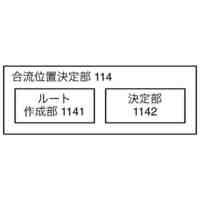
自車位置推定部の機能ブロックの一例である。
車載機を搭載する車両周辺の俯瞰図を示す。
車載機を搭載する車両周辺の俯瞰図を示す。
ワールド座標系における2次元平面上での、ボクセルデータが存在するボクセルとこれらのボクセル付近の位置を示す計測点との位置関係を示す。
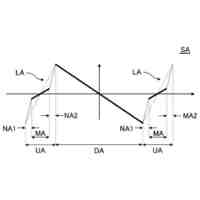
推定パラメータの値とスコア値との関係を示すグラフである。
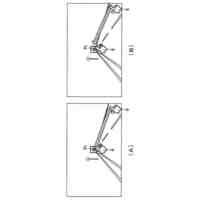
図9(A)~(D)に示される推定パラメータの初期値及び探索結果を夫々適用したワールド座標系の計測点と計測された地物の実際の位置との対応を概念的に示した図である。
オクルージョンに起因してDARが閾値に達しないときの車両周辺の俯瞰図を示す。
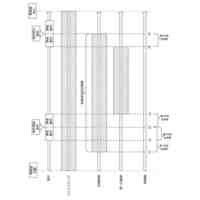
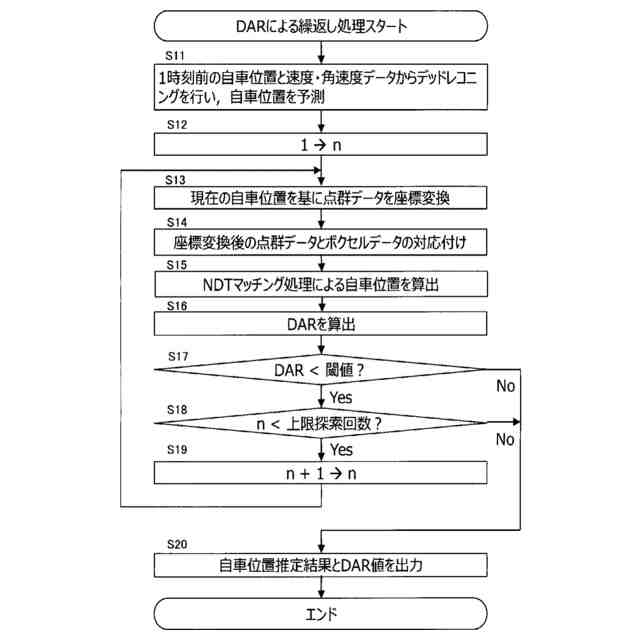
推定パラメータを推定する度にDARに基づき推定パラメータの再探索の要否を判定する自車位置推定処理の手順を示すフローチャートの一例である。
推定パラメータの探索を行う回数をDARに基づき決定する自車位置推定処理の手順を示すフローチャートの一例である。
変形例に係る自車位置推定処理の手順を示すフローチャートの一例である。
【発明を実施するための形態】
【0010】
本発明の好適な実施形態によれば、情報処理装置は、計測装置が出力する点群データを取得する取得部と、前記点群データと、空間を区切った単位領域ごとの物体の位置情報との照合により、前記点群データを構成する計測点と前記単位領域の各々との対応付けを行う対応付け部と、前記単位領域のいずれかと対応付けられた計測点と、当該単位領域における物体の位置情報とに基づき、前記計測装置を備える移動体の位置推定を行う位置推定部と、前記点群データの計測点の数に対する、当該計測点のうち前記単位領域と対応付けられた計測点の数の割合を用いた、前記位置推定により得られた位置の信頼度指標を算出する算出部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
パイオニア株式会社
表示装置
16日前
パイオニア株式会社
評価装置
28日前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
ドライブレコーダ
21日前
パイオニア株式会社
判定装置、判定方法および判定プログラム
14日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
28日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
28日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
1か月前
パイオニア株式会社
監視装置、監視方法、および監視プログラム
24日前
パイオニア株式会社
監視装置、監視方法、および監視プログラム
24日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
1か月前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
1か月前
パイオニア株式会社
情報処理装置、情報処理方法及び情報処理用プログラム
29日前
パイオニア株式会社
情報処理装置、情報処理方法及び情報処理用プログラム
29日前
パイオニア株式会社
情報処理装置、情報処理方法及び情報処理用プログラム
29日前
パイオニア株式会社
光学装置
1か月前
パイオニア株式会社
光学装置
1か月前
パイオニア株式会社
表示装置
1か月前
パイオニア株式会社
光学装置
1か月前
パイオニア株式会社
光反射体
1か月前
パイオニア株式会社
測距装置
1か月前
パイオニア株式会社
保持装置
9日前
パイオニア株式会社
情報処理装置、情報処理方法、および、情報処理プログラム
1か月前
パイオニア株式会社
情報処理装置、情報処理方法、および、情報処理プログラム
1か月前
パイオニア株式会社
センサ装置
1か月前
パイオニア株式会社
生体センサ
14日前
パイオニア株式会社
情報処理装置、情報処理方法、および、情報処理プログラム
28日前
パイオニア株式会社
情報処理装置
9日前
パイオニア株式会社
段差検出装置
1か月前
パイオニア株式会社
映像制御装置
14日前
パイオニア株式会社
情報処理装置、表示装置、制御方法、プログラム及び記憶媒体
1か月前
パイオニア株式会社
情報処理装置
21日前
パイオニア株式会社
地図データ生成方法
9日前
パイオニア株式会社
地図データ生成装置
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ