TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095251
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211145
出願日
2023-12-14
発明の名称
監視装置、監視方法および監視プログラム
出願人
パイオニア株式会社
代理人
個人
主分類
G01S
13/50 20060101AFI20250619BHJP(測定;試験)
要約
【課題】注意対象である物体との誤判定が発生する可能性を回避すること。
【解決手段】本発明に係る装置は、取得部と、判定部とを備える。取得部は、車両に備えられた動体センサにより逐次生成される複数のセンサデータを取得する。判定部は、取得された複数のセンサデータに含まれる位置データによって求められる動体の平均の位置からそれぞれの位置データまでの距離に基づいて、動体が注意対象としない物体であるか否かを判定する。
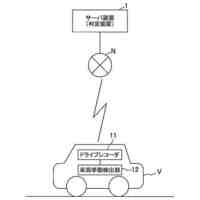
【選択図】図2
特許請求の範囲
【請求項1】
車両に備えられた動体センサにより逐次生成される複数のセンサデータを取得する取得部と、
前記複数のセンサデータに含まれる位置データによって求められる動体の平均の位置から、それぞれの位置データまでの距離に基づいて、前記動体が注意対象としない物体であるか否かを判定する判定部と、
を有することを特徴とする監視装置。
続きを表示(約 1,100 文字)
【請求項2】
前記判定部は、
前記複数のセンサデータそれぞれに基づいて特定された複数の位置データを用いて前記動体の平均の位置を算出し、
前記動体の平均の位置からそれぞれの位置データまでの距離が所定の長さ以内となるセンサデータが前記複数のセンサデータの中に所定の割合以上含まれる場合に、前記動体が注意対象としない物体であると判定する
ことを特徴とする請求項1に記載の監視装置。
【請求項3】
前記判定部は、
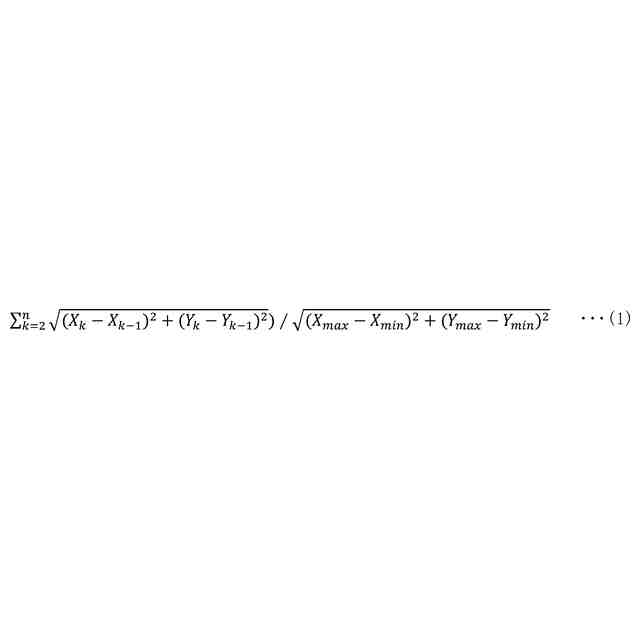
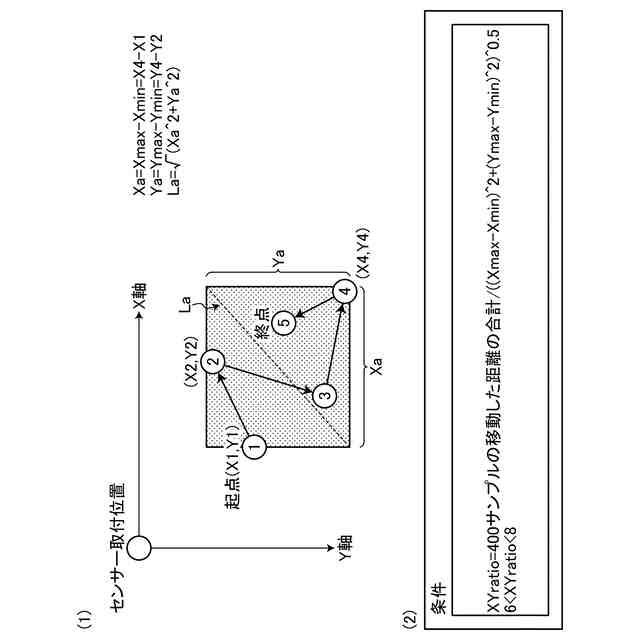
さらに、前記複数のセンサデータの移動距離の標準偏差が第1の範囲内であるという条件、前記複数のセンサデータそれぞれに含まれる信号の強度の標準偏差が閾値未満であるという条件、および、前記複数のセンサデータの移動距離の合計をそれぞれのセンサデータの位置データの最大値と最小値とから求められる対角線の長さで除算した値が第2の範囲内であるという条件の少なくとも1つの条件を満たす場合に、前記動体が注意対象としない物体であると判定する
ことを特徴とする請求項2に記載の監視装置。
【請求項4】
前記取得部により取得された複数のセンサデータから、前記車両に取り付けられたドアの近傍で特定される位置データに対応するセンサデータを除外する除外部を、
さらに有することを特徴とする請求項2に記載の監視装置。
【請求項5】
前記除外部は、
前記取得部により取得された複数のセンサデータから、それぞれのセンサデータに含まれる距離が所定の距離以上のセンサデータ、または、それぞれのセンサデータに含まれる距離が所定の高さ以下のセンサデータを除外する
ことを特徴とする請求項4に記載の監視装置。
【請求項6】
監視装置が実行する方法であって、
車両に備えられた動体センサにより逐次生成される複数のセンサデータを取得する取得工程と、
複数のセンサデータに含まれる位置データによって求められる動体の平均の位置からそれぞれの位置データまでの距離に基づいて、前記動体が注意対象としない物体であるか否かを判定する判定工程と、
を含むことを特徴とする監視方法。
【請求項7】
車両に備えられた動体センサにより逐次生成される複数のセンサデータを取得する取得ステップと、
複数のセンサデータに含まれる位置データによって求められる動体の平均の位置からそれぞれの位置データまでの距離に基づいて、前記動体が注意対象としない物体であるか否かを判定する判定ステップと、
をコンピュータに実行させることを特徴とする監視プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、監視装置、監視方法および監視プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、マイクロ波を利用して物体を検知するようにしたマイクロウエーブセンサに対し、人体等の検知すべき物体と検知すべきでない物体(例えば、風によって揺れる草木等)との判別を正確に行って、誤報を回避する技術が開示されている(例えば、特許技術文献1)。かかる技術の手段は、相対距離の単位時間当たりの変化量が所定量以上である物体または、相対的な移動距離が所定値以上である物体のみを、検知すべき物体であると判定し、それ以外のものに対しては検知すべきでない物体であると判定する。
【先行技術文献】
【特許文献】
【0003】
特開2003-207462号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、検知すべきでない物体が例えばのぼり旗である場合、検知すべき物体との誤検知が発生する可能性があるという問題があり、のぼり旗は、検知すべき物体ではないとして特定する必要がある。例えば、のぼり旗の動きが速い場合や移動距離が大きい場合には、のぼり旗が検知すべき物体であるとして誤検知してしまうおそれがある。このように、本発明が解決しようとする課題としては、上述した問題が一例として挙げられる。
【0005】
なお、上記課題は、物体の検知に限定されるものではなく、注意対象としない物体が例えばのぼり旗である場合にも同様に生じる課題である。すなわち、注意対象としない物体が例えばのぼり旗である場合、注意対象である物体との誤判定が発生する可能性があるという問題があり、のぼり旗は、注意対象である物体ではないとして特定する必要がある。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するため、請求項1に記載の発明は、車両に備えられた動体センサにより逐次生成される複数のセンサデータを取得する取得部と、複数のセンサデータに含まれる位置データによって求められる動体の平均の位置からそれぞれの位置データまでの距離に基づいて、前記動体が注意対象としない物体であるか否かを判定する判定部、とを有することを特徴とする。
【0007】
請求項6に記載の発明は、監視装置が実行する方法であって、車両に備えられた動体センサにより逐次生成される複数のセンサデータを取得する取得工程と、複数のセンサデータに含まれる位置データによって求められる動体の平均の位置からそれぞれの位置データまでの距離に基づいて、前記動体が注意対象としない物体であるか否かを判定する判定工程と、を含むことを特徴とする。
【0008】
請求項7に記載の発明は、車両に備えられた動体センサにより逐次生成される複数のセンサデータを取得する取得ステップと、複数のセンサデータに含まれる位置データによって求められる動体の平均の位置からそれぞれの位置データまでの距離に基づいて、前記動体が注意対象としない物体であるか否かを判定する判定ステップと、をコンピュータに実行させることを特徴とする。
【図面の簡単な説明】
【0009】
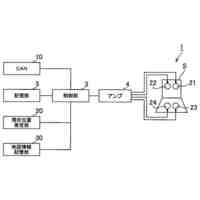
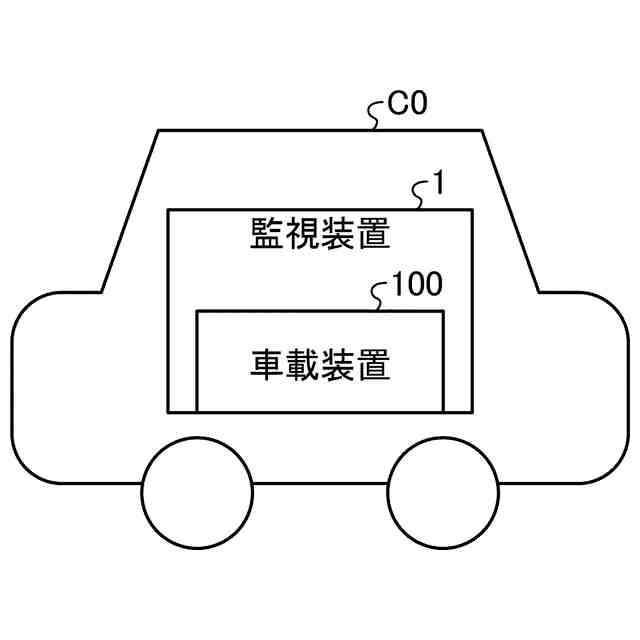
図1は、実施形態に係る監視装置の構成の一例を示す図である。
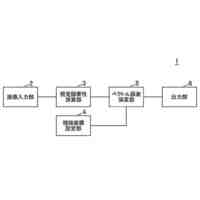
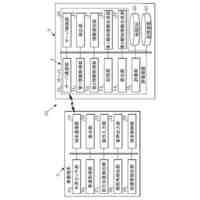
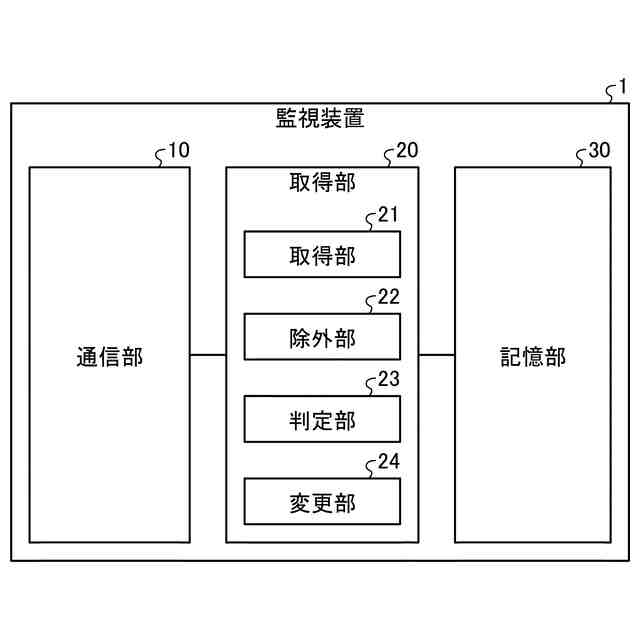
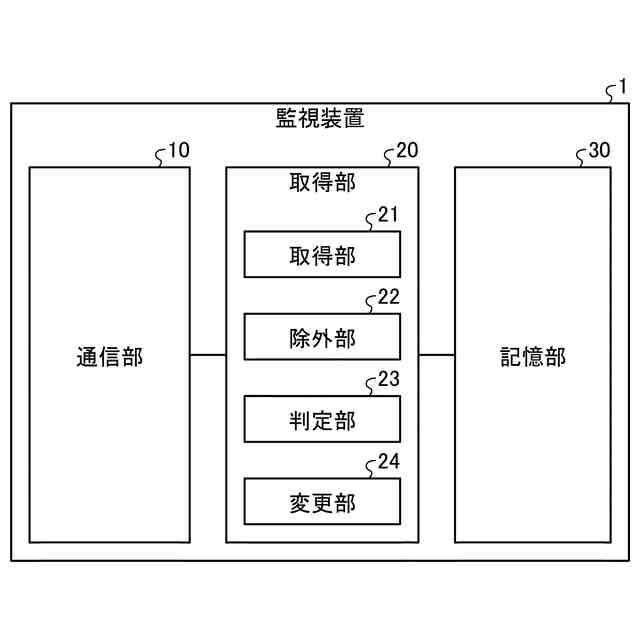
図2は、実施形態に係る監視装置の機能構成の一例を示す図である。
図3は、実施形態に係る記憶部に記憶される情報の一例を示す図である。
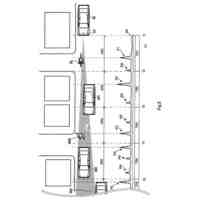
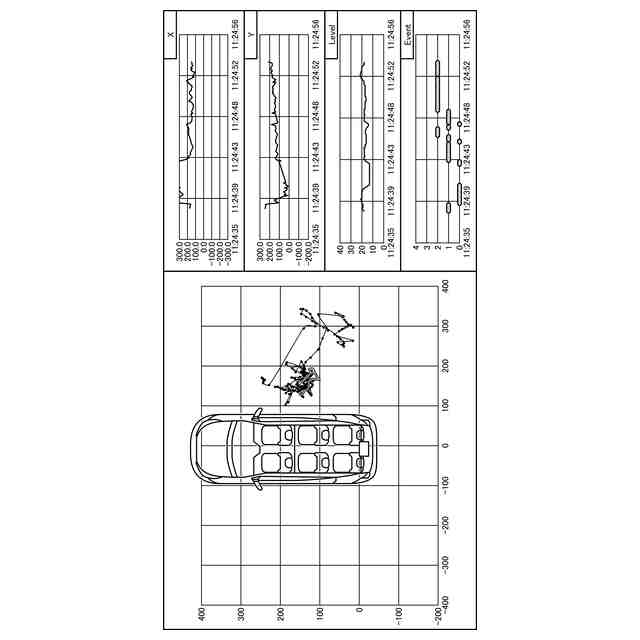
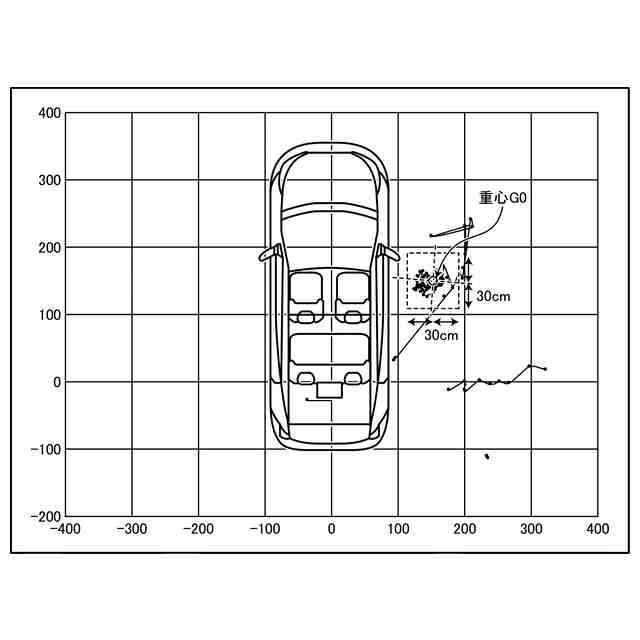
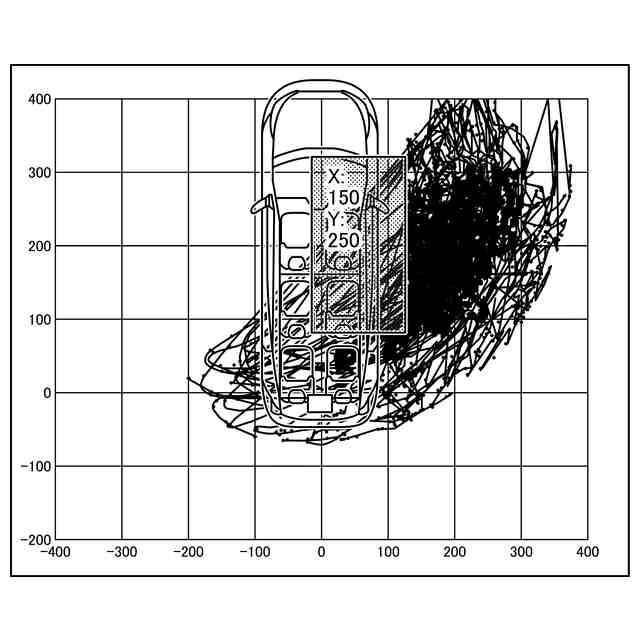
図4は、実施形態に係る監視装置による判定処理の一例を示す図である。
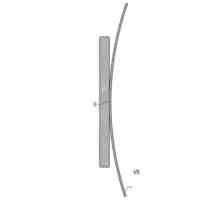
図5は、実施形態に係る監視装置による判定処理の一例を示す図である。
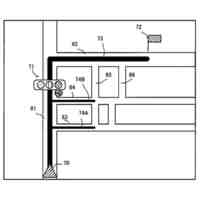
図6は、実施形態に係る監視装置による除外処理を示す図である。
図7は、実施形態に係る監視装置による除外処理を示す図である。
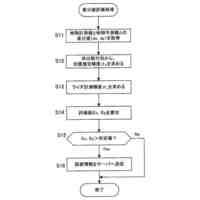
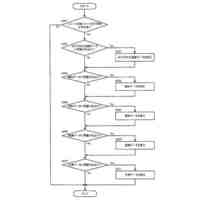
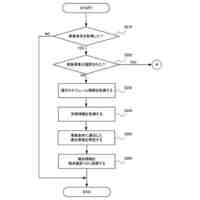
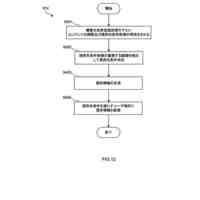
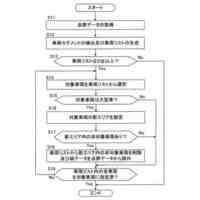
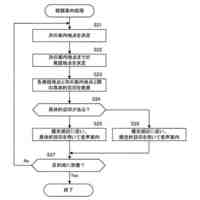
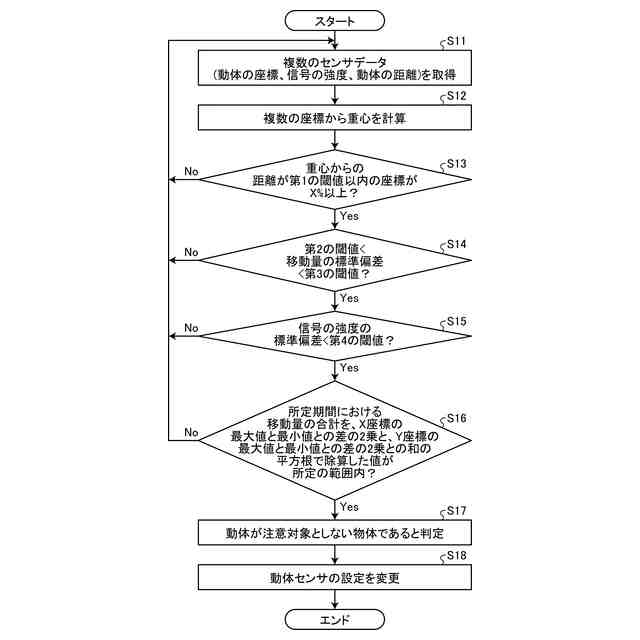
図8は、実施形態に係る監視装置による処理の流れの一例を示すフローチャートである。
図9は、監視装置の機能を実現するコンピュータの一例を示すハードウェア構成図である。
【発明を実施するための形態】
【0010】
以下に、図面を参照しつつ、本発明を実施するための形態(以下、実施の形態)について説明する。なお、以下に説明する実施の形態によって本発明が限定されるものではない。さらに、図面の記載において、同一の部分には同一の符号を付している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
判定装置
16日前
パイオニア株式会社
取付機構
5日前
パイオニア株式会社
サーバ装置
3日前
パイオニア株式会社
距離算出装置
12日前
パイオニア株式会社
情報表示装置
16日前
パイオニア株式会社
状況出力装置
10日前
パイオニア株式会社
情報処理装置
16日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
16日前
パイオニア株式会社
情報処理装置
3日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
16日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
16日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
13日前
パイオニア株式会社
ミラースキャナ
16日前
パイオニア株式会社
データ処理装置
16日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
13日前
パイオニア株式会社
アクチュエータ
23日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
13日前
パイオニア株式会社
リスク情報出力装置
10日前
パイオニア株式会社
振動発生装置、振動発生方法
5日前
パイオニア株式会社
センサ装置、筐体及びカバー部
3日前
パイオニア株式会社
情報処理装置及び情報処理方法
10日前
パイオニア株式会社
情報処理装置及び情報処理方法
3日前
パイオニア株式会社
走査方法の決定方法、および計測方法
16日前
パイオニア株式会社
評価装置、評価方法及び評価プログラム
3日前
パイオニア株式会社
情報処理装置、方法、プログラム及び記憶媒体
23日前
パイオニア株式会社
出力装置、制御方法、プログラム及び記憶媒体
12日前
パイオニア株式会社
表示装置、制御方法、プログラム及び記憶媒体
12日前
パイオニア株式会社
表示制御装置、制御方法、プログラム及び記憶媒体
16日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
16日前
パイオニア株式会社
情報処理装置、判定方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
表示制御装置、表示制御方法及び表示制御用プログラム
23日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
18日前
パイオニア株式会社
情報処理装置、情報処理方法および情報処理プログラム
10日前
パイオニア株式会社
音声出力装置、音声出力方法、プログラム及び記憶媒体
23日前
パイオニア株式会社
位置推定装置、推定装置、制御方法、プログラム及び記憶媒体
16日前
パイオニア株式会社
自動運転制御装置、自動運転制御方法及び自動運転制御プログラム
16日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ