TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123517
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2025106094,2024027286
出願日
2025-06-24,2018-02-27
発明の名称
自動運転制御装置、自動運転制御方法及び自動運転制御プログラム
出願人
パイオニア株式会社
代理人
弁理士法人インテクト国際特許事務所
,
個人
主分類
G01C
21/34 20060101AFI20250815BHJP(測定;試験)
要約
【課題】本発明は、移動体の自動運転制御装置等の技術分野に関し、目的地の入力に要する時間を有効活用することにより、目的地への到着を早くすることを課題とする。
【解決手段】そこで、自動運転可能な移動体の真の目的地である真目的地が設定されるまでの暫定の目的地である暫定目的地を設定し、真目的地が設定される前に暫定目的地に向けて移動体の自動運転を開始させる。
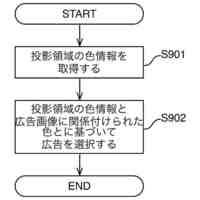
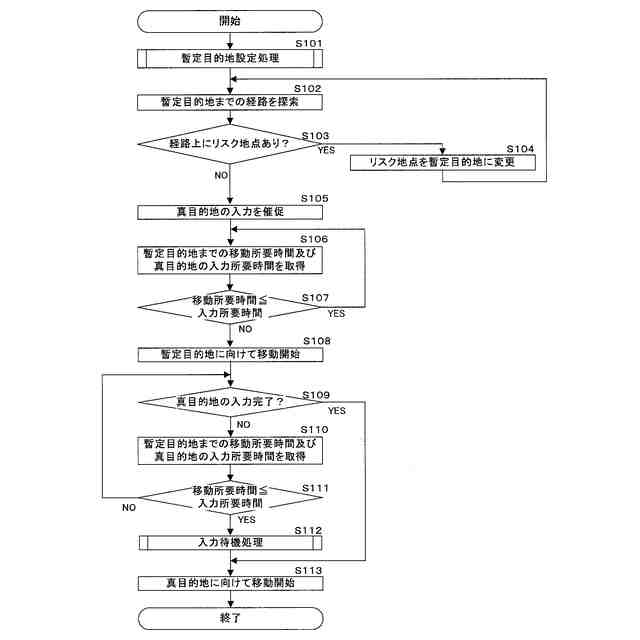
【選択図】図9
特許請求の範囲
【請求項1】
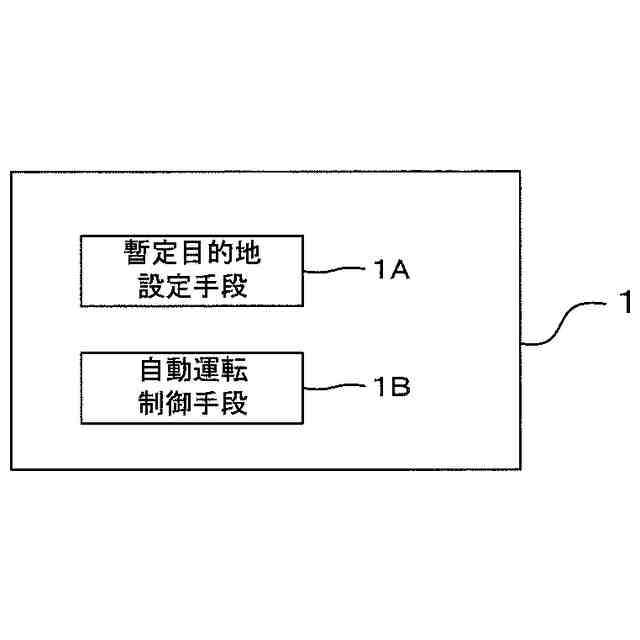
自動運転可能な移動体に搭乗するユーザの移動履歴情報に基づいて、前記移動体の真の目的地である真目的地が設定されるまでの暫定の目的地である暫定目的地を設定する暫定目的地設定手段と、
前記真目的地が設定される前に前記暫定目的地に向けて前記移動体の自動運転を開始させる自動運転制御手段と、
現在の天候又は気温の少なくとも何れかに関する情報である現在環境情報を取得する取得手段と、
を備え、
前記移動履歴情報は、前記ユーザが過去に訪問又は通過した地点と、前記訪問時又は前記通過時の天候又は前記訪問時又は前記通過時の気温の少なくとも何れかに関する情報である過去環境情報を含み、
前記暫定目的地設定手段は、前記取得手段が取得した現在環境情報と、前記過去環境情報を含む前記移動履歴情報とに基づいて、前記暫定目的地を設定することを特徴とする自動運転制御装置。
続きを表示(約 2,000 文字)
【請求項2】
自動運転可能な移動体に搭乗するユーザの移動履歴情報に基づいて、前記移動体の真の目的地である真目的地が設定されるまでの暫定の目的地である暫定目的地を設定する暫定目的地設定手段と、
前記真目的地が設定される前に前記暫定目的地に向けて前記移動体の自動運転を開始させる自動運転制御手段と、
前記移動体が前記暫定目的地に到達するまでの到達所要時間を算出する算出手段と、
前記移動体に搭乗するユーザが前記真目的地の入力を完了するまでの入力所要時間を取得する取得手段と、
前記到達所要時間と前記入力所要時間に基づいて、前記移動体が前記暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了するか否かを判定する判定手段と、
を備え、
前記自動運転制御手段は、前記移動体が前記暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了すると前記判定手段によって判定された場合に、前記暫定目的地に向けた前記移動体の自動運転による移動を開始させ、前記移動体が前記暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了しないと前記判定手段によって判定された場合に、前記移動体を現在位置に待機させることを特徴とする自動運転制御装置。
【請求項3】
自動運転可能な移動体に搭乗するユーザの移動履歴情報に基づいて、前記移動体の真の目的地である真目的地が設定されるまでの暫定の目的地である暫定目的地を設定する暫定目的地設定手段と、
前記真目的地が設定される前に前記暫定目的地に向けて前記移動体の自動運転を開始させる自動運転制御手段と、
前記移動体が前記暫定目的地に到達するまでの到達所要時間を算出する算出手段と、
前記移動体に搭乗するユーザが前記真目的地の入力を完了するまでの入力所要時間を取得する取得手段と、
前記到達所要時間と前記入力所要時間に基づいて、前記暫定目的地に向けて自動運転中の前記移動体が当該暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了するか否かを判定する判定手段と、
を備え、
前記自動運転制御手段は、前記自動運転中に、前記移動体が前記暫定目的地に到達する前に前記ユーザが前記真目的地の入力を完了できないと前記判定手段によって判定された場合に、前記暫定目的地の所定の範囲内に前記移動体を存在させることを特徴とする自動運転制御装置。
【請求項4】
請求項1乃至3の何れか一項に記載の自動運転制御装置であって、
前記暫定目的地設定手段は、現在地点から所定の範囲内にある地点であって、前記ユーザが過去に訪問した地点又は通過した地点から前記暫定目的地を選択することを特徴とする自動運転制御装置。
【請求項5】
請求項4に記載の自動運転制御装置であって、
前記暫定目的地設定手段は、現在地点から所定の範囲内にある地点であって、前記ユーザが最も多く過去に訪問した地点又は最も多く通過した地点から前記暫定目的地を選択することを特徴とする自動運転制御装置。
【請求項6】
請求項1乃至3の何れか一項に記載の自動運転制御装置であって、
前記暫定目的地設定手段は、前記ユーザが現在位置から移動する場合に通過した地点のうち、通過した回数が最多の地点を前記暫定目的地に設定することを特徴とする自動運転制御装置。
【請求項7】
請求項1乃至3の何れか一項に記載の自動運転制御装置であって、
前記暫定目的地設定手段は、前記ユーザが訪問する可能性のある地点であると推定された地点を前記暫定目的地に設定することを特徴とする自動運転制御装置。
【請求項8】
請求項1乃至3の何れか一項に記載の自動運転制御装置であって、
前記自動運転制御手段は、前記自動運転中に前記真目的地が設定されたことに基づいて、前記暫定目的地に向けた自動運転から、前記真目的地に向けた自動運転に切り替えることを特徴とする自動運転制御装置。
【請求項9】
請求項1乃至3の何れか一項に記載の自動運転制御装置であって、
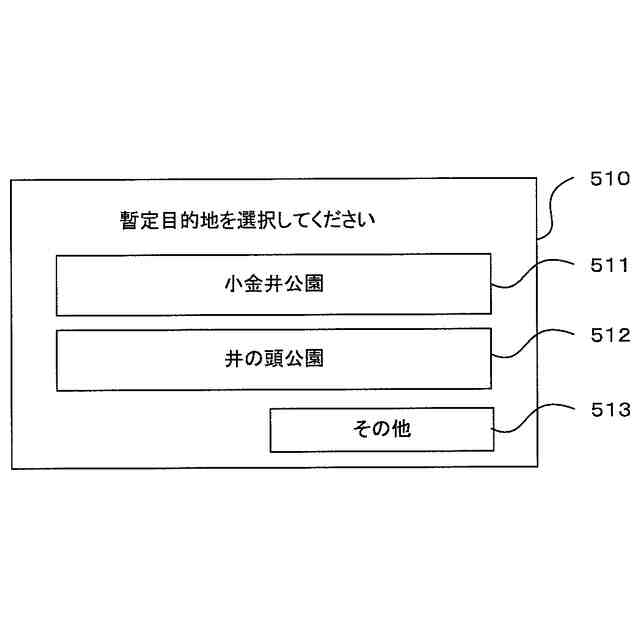
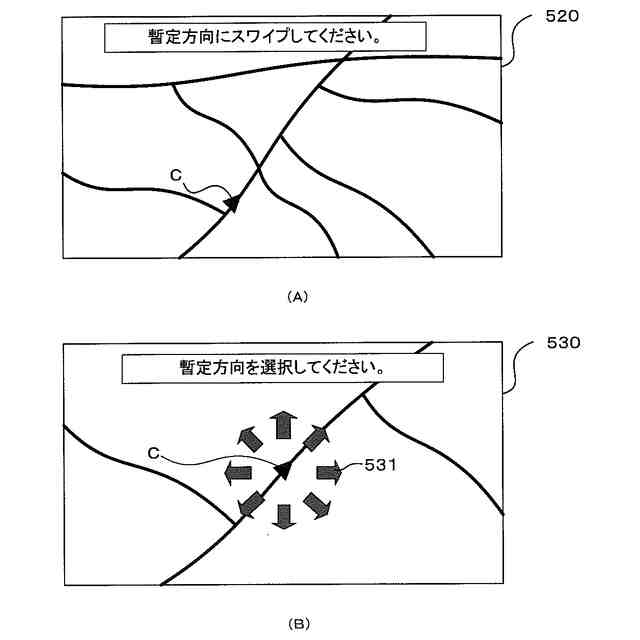
前記暫定目的地設定手段は、前記移動体が現在位置から移動する方向であって、前記移動体に搭乗するユーザが指定した方向と、前記移動履歴情報に基づいて、前記暫定目的地を設定することを特徴とする自動運転制御装置。
【請求項10】
請求項1乃至3の何れか一項に記載の自動運転制御装置であって、
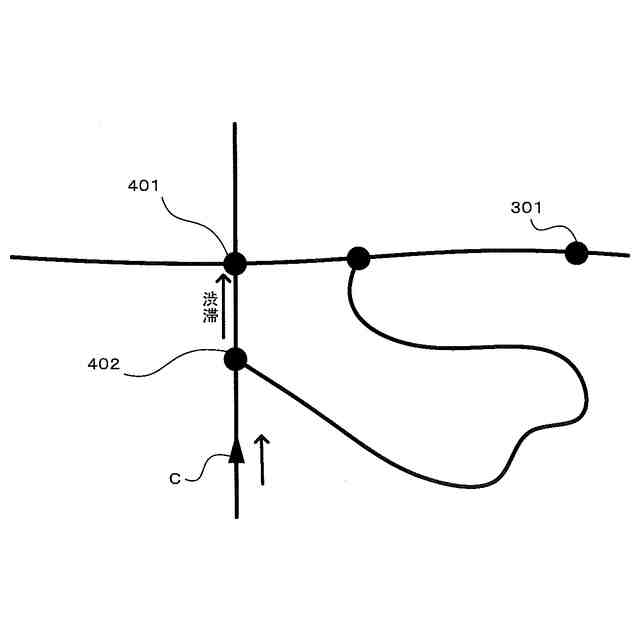
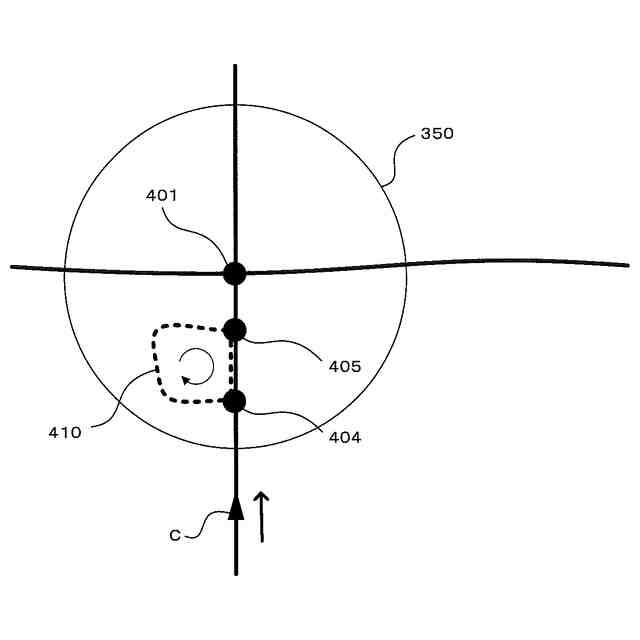
前記暫定目的地までの経路上に分岐地点が存在する場合に、前記分岐地点を前記暫定目的地に変更する変更手段を更に備えることを特徴とする自動運転制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、移動体の自動運転制御装置等の技術分野に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
運転者が自動車等の移動体に対して運転操作をしなくとも当該移動体の自律走行を可能とする自動運転制御に関する技術の開発が進められている。例えば、特許文献1には、自動運転制御可能な車両に搭載されるコンピュータに目的地が予め記憶されたカード型PC(Personal Computer)が挿入されると、当該コンピュータが目的地までの走行ルートを設定し、車両を目的地まで自動運転させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平11-282530号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術では、コンピュータにカード型PCが挿入されるまで(すなわち、目的地の入力が完了するまで)、自動運転による移動が開始されないため、その分だけ目的地への到着が遅くなってしまう。
【0005】
本願発明が解決しようとする課題としては、こうした事情に鑑み、目的地の入力に要する時間を有効活用することにより、目的地への到着を早くすることができる自動運転制御装置等を提供することが一例として挙げられる。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、自動運転可能な移動体に搭乗するユーザの移動履歴情報に基づいて、前記移動体の真の目的地である真目的地が設定されるまでの暫定の目的地である暫定目的地を設定する暫定目的地設定手段と、前記真目的地が設定される前に前記暫定目的地に向けて前記移動体の自動運転を開始させる自動運転制御手段と、現在の天候又は気温の少なくとも何れかに関する情報である現在環境情報を取得する取得手段と、を備え、前記移動履歴情報は、前記ユーザが過去に訪問又は通過した地点と、前記訪問時又は前記通過時の天候又は前記訪問時又は前記通過時の気温の少なくとも何れかに関する情報である過去環境情報を含み、前記暫定目的地設定手段は、前記取得手段が取得した現在環境情報と、前記過去環境情報を含む前記移動履歴情報とに基づいて、前記暫定目的地を設定することを特徴とする。
【0007】
請求項2に記載の発明は、自動運転可能な移動体に搭乗するユーザの移動履歴情報に基づいて、前記移動体の真の目的地である真目的地が設定されるまでの暫定の目的地である暫定目的地を設定する暫定目的地設定手段と、前記真目的地が設定される前に前記暫定目的地に向けて前記移動体の自動運転を開始させる自動運転制御手段と、前記移動体が前記暫定目的地に到達するまでの到達所要時間を算出する算出手段と、前記移動体に搭乗するユーザが前記真目的地の入力を完了するまでの入力所要時間を取得する取得手段と、前記到達所要時間と前記入力所要時間に基づいて、前記移動体が前記暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了するか否かを判定する判定手段と、を備え、前記自動運転制御手段は、前記移動体が前記暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了すると前記判定手段によって判定された場合に、前記暫定目的地に向けた前記移動体の自動運転による移動を開始させ、前記移動体が前記暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了しないと前記判定手段によって判定された場合に、前記移動体を現在位置に待機させることを特徴とする。
【0008】
請求項3に記載の発明は、自動運転可能な移動体に搭乗するユーザの移動履歴情報に基づいて、前記移動体の真の目的地である真目的地が設定されるまでの暫定の目的地である暫定目的地を設定する暫定目的地設定手段と、前記真目的地が設定される前に前記暫定目的地に向けて前記移動体の自動運転を開始させる自動運転制御手段と、前記移動体が前記暫定目的地に到達するまでの到達所要時間を算出する算出手段と、前記移動体に搭乗するユーザが前記真目的地の入力を完了するまでの入力所要時間を取得する取得手段と、前記到達所要時間と前記入力所要時間に基づいて、前記暫定目的地に向けて自動運転中の前記移動体が当該暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了するか否かを判定する判定手段と、を備え、前記自動運転制御手段は、前記自動運転中に、前記移動体が前記暫定目的地に到達する前に前記ユーザが前記真目的地の入力を完了できないと前記判定手段によって判定された場合に、前記暫定目的地の所定の範囲内に前記移動体を存在させることを特徴とする。
【0009】
請求項11に記載の発明は、自動運転制御装置による自動運転制御方法であって、自動運転可能な移動体に搭乗するユーザの移動履歴情報に基づいて、前記移動体の真の目的地である真目的地が設定されるまでの暫定の目的地である暫定目的地を設定する暫定目的地設定工程と、前記真目的地が設定される前に前記暫定目的地に向けて前記移動体の自動運転を開始させる自動運転制御工程と、現在の天候又は気温の少なくとも何れかに関する情報である現在環境情報を取得する取得工程と、を含み、前記移動履歴情報は、前記ユーザが過去に訪問又は通過した地点と、前記訪問時又は前記通過時の天候又は前記訪問時又は前記通過時の気温の少なくとも何れかに関する情報である過去環境情報を含み、前記暫定目的地設定工程では、前記取得工程で取得した現在環境情報と、前記過去環境情報を含む前記移動履歴情報とに基づいて、前記暫定目的地を設定することを特徴とする。
【0010】
請求項12に記載の発明は、自動運転制御装置による自動運転制御方法であって、自動運転可能な移動体に搭乗するユーザの移動履歴情報に基づいて、前記移動体の真の目的地である真目的地が設定されるまでの暫定の目的地である暫定目的地を設定する暫定目的地設定工程と、前記真目的地が設定される前に前記暫定目的地に向けて前記移動体の自動運転を開始させる自動運転制御工程と、前記移動体が前記暫定目的地に到達するまでの到達所要時間を算出する算出工程と、前記移動体に搭乗するユーザが前記真目的地の入力を完了するまでの入力所要時間を取得する取得工程と、前記到達所要時間と前記入力所要時間に基づいて、前記移動体が前記暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了するか否かを判定する判定工程と、を含み、前記自動運転制御工程では、前記移動体が前記暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了すると前記判定工程で判定された場合に、前記暫定目的地に向けた前記移動体の自動運転による移動を開始させ、前記移動体が前記暫定目的地に到達する前に、前記ユーザが前記真目的地の入力を完了しないと前記判定工程で判定された場合に、前記移動体を現在位置に待機させることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
制御装置
25日前
パイオニア株式会社
探索装置
25日前
パイオニア株式会社
制御装置
17日前
パイオニア株式会社
判定装置
10日前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
情報処理装置
17日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
10日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
10日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
10日前
パイオニア株式会社
情報処理装置
10日前
パイオニア株式会社
情報処理装置
25日前
パイオニア株式会社
情報表示装置
10日前
パイオニア株式会社
情報処理装置
19日前
パイオニア株式会社
距離算出装置
6日前
パイオニア株式会社
状況出力装置
4日前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
ミラースキャナ
10日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
7日前
パイオニア株式会社
アクチュエータ
17日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
7日前
パイオニア株式会社
データ処理装置
10日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
7日前
パイオニア株式会社
運転指標出力装置
25日前
パイオニア株式会社
リスク情報出力装置
4日前
パイオニア株式会社
情報処理装置及び情報処理方法
4日前
パイオニア株式会社
調整方法、検出機器及び検出装置
17日前
パイオニア株式会社
表示装置、表示方法及びプログラム
25日前
パイオニア株式会社
走査方法の決定方法、および計測方法
10日前
パイオニア株式会社
表示装置、制御方法、プログラム及び記憶媒体
6日前
パイオニア株式会社
情報処理装置、方法、プログラム及び記憶媒体
17日前
パイオニア株式会社
出力装置、制御方法、プログラム及び記憶媒体
6日前
パイオニア株式会社
経路案内装置、制御方法、プログラム及び記憶媒体
25日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
17日前
パイオニア株式会社
表示制御装置、制御方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
移動体装置、情報処理方法及び情報処理用プログラム
25日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ