TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123309
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2025097714,2023187396
出願日
2025-06-11,2018-12-14
発明の名称
情報処理装置
出願人
パイオニア株式会社
代理人
個人
,
個人
,
個人
主分類
G01P
3/68 20060101AFI20250815BHJP(測定;試験)
要約
【課題】車両速度を精度良く取得することができる情報処理装置を提供する。
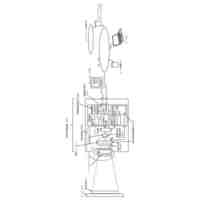
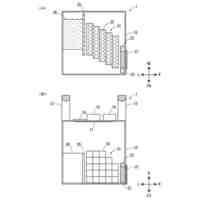
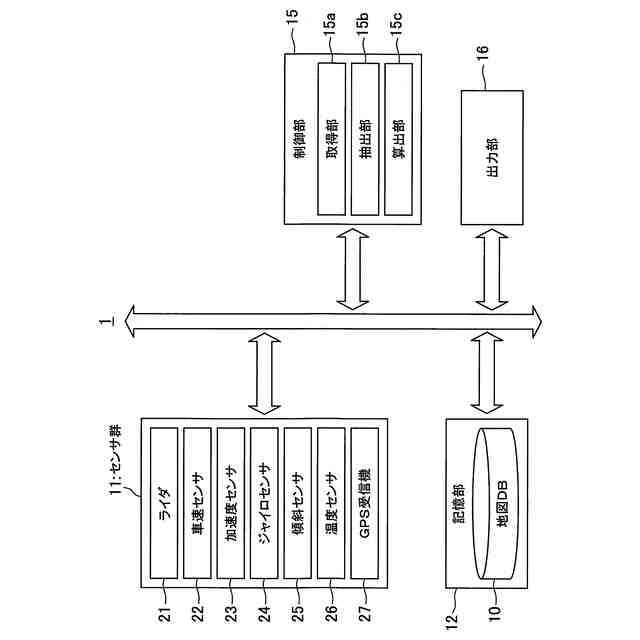
【解決手段】制御部15は、車両Cの周辺の地物を検出するライダ21の検出結果のうち、車両Cとともに移動するウィンドウW内における白線D1の検出結果を、Δtの時間間隔で連続的に取得し、これら複数の検出結果から、白線D1の一端部の車両Cの移動方向におけるラインの位置を検出する。そして、検出ラインの位置の時間的な変化に基づいて、車両Cの平均速度vを算出する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体とともに移動する検出部により検出された所定検出領域内における地物の検出結果を、所定の時間間隔で連続的に取得する取得部と、
前記取得された複数の検出結果から、前記検出領域内における前記地物の特徴部分の位置情報を抽出する抽出部と、
抽出された位置情報の時間的な変化に基づいて、前記移動体の速度を算出する算出部と、を備え、
前記地物の特徴部分は、当該地物の一端部であり、
前記位置情報の時間的な変化は、前記特徴部分の検出開始から検出終了までの経過時間である、
ことを特徴とする情報処理装置。
続きを表示(約 2,600 文字)
【請求項2】
移動体とともに移動する検出部により検出された所定検出領域内における地物の検出結果を、所定の時間間隔で連続的に取得する取得部と、
前記取得された複数の検出結果から、前記検出領域内における前記地物の特徴部分の位置情報を抽出する抽出部と、
抽出された位置情報の時間的な変化に基づいて、前記移動体の速度を算出する算出部と、を備え、
当該地物の前記移動体の移動方向に対応する長さが既知であって、前記地物の特徴部分は、当該地物の一端部と他端部であり、
前記位置情報の時間的な変化は、前記一端部の検出開始から他端部の検出開始までの経過時間、及び一端部の検出終了から他端部の検出終了までの経過時間の少なくとも一方である、
ことを特徴とする情報処理装置。
【請求項3】
移動体とともに移動する検出部により検出された所定検出領域内における地物の検出結果を、所定の時間間隔で連続的に取得する取得部と、
前記取得された複数の検出結果から、前記検出領域内における前記地物の特徴部分の位置情報を抽出する抽出部と、
抽出された位置情報の時間的な変化に基づいて、前記移動体の速度を算出する算出部と、を備え、
前記検出領域は、前記移動体の移動方向の前後に所定距離を隔てて2箇所であり、前記地物の特徴部分は、当該地物の一端部である、
ことを特徴とする情報処理装置。
【請求項4】
前記位置情報の時間的な変化は、前記特徴部分の前側の前記検出領域での検出終了から後側の前記検出領域での検出開始までの経過時間であることを特徴とする請求項3に記載の情報処理装置。
【請求項5】
前記検出領域は、前記検出部の検出可能範囲内に設定された矩形状の領域であることを特徴とする請求項1から4のうちいずれか一項に記載の情報処理装置。
【請求項6】
移動体の周辺の地物を検出する検出部と、
前記移動体とともに移動する前記検出部により検出された所定検出領域内における前記地物の検出結果を、所定の時間間隔で連続的に取得する取得部と、
前記取得された複数の検出結果から、前記検出領域内における前記地物の特徴部分の位置情報を抽出する抽出部と、
抽出された位置情報の時間的な変化に基づいて、前記移動体の速度を算出する算出部と、を備え、
前記地物の特徴部分は、当該地物の一端部であり、
前記位置情報の時間的な変化は、前記特徴部分の検出開始から検出終了までの経過時間である、
ことを特徴とする検出装置。
【請求項7】
移動体の周辺の地物を検出する検出部と、
前記移動体とともに移動する前記検出部により検出された所定検出領域内における前記地物の検出結果を、所定の時間間隔で連続的に取得する取得部と、
前記取得された複数の検出結果から、前記検出領域内における前記地物の特徴部分の位置情報を抽出する抽出部と、
抽出された位置情報の時間的な変化に基づいて、前記移動体の速度を算出する算出部と、を備え、
当該地物の前記移動体の移動方向に対応する長さが既知であって、前記地物の特徴部分は、当該地物の一端部と他端部であり、
前記位置情報の時間的な変化は、前記一端部の検出開始から他端部の検出開始までの経過時間、及び一端部の検出終了から他端部の検出終了までの経過時間の少なくとも一方である、
ことを特徴とする検出装置。
【請求項8】
移動体の周辺の地物を検出する検出部と、
前記移動体とともに移動する前記検出部により検出された所定検出領域内における前記地物の検出結果を、所定の時間間隔で連続的に取得する取得部と、
前記取得された複数の検出結果から、前記検出領域内における前記地物の特徴部分の位置情報を抽出する抽出部と、
抽出された位置情報の時間的な変化に基づいて、前記移動体の速度を算出する算出部と、を備え、
前記検出領域は、前記移動体の移動方向の前後に所定距離を隔てて2箇所であり、前記地物の特徴部分は、当該地物の一端部である、
ことを特徴とする検出装置。
【請求項9】
移動体の周辺の地物を検出する検出部の検出結果に基づいて所定の処理を行う情報処理装置で実行される情報処理方法であって、
前記移動体とともに移動する前記検出部により検出された所定検出領域内における前記地物の検出結果を、所定の時間間隔で連続的に取得する取得工程と、
前記取得された複数の検出結果から、前記検出領域内における前記地物の特徴部分の位置情報を抽出する抽出工程と、
抽出された位置情報の時間的な変化に基づいて、前記移動体の速度を算出する算出工程と、を含み、
前記地物の特徴部分は、当該地物の一端部であり、
前記位置情報の時間的な変化は、前記特徴部分の検出開始から検出終了までの経過時間である、
ことを特徴とする情報処理方法。
【請求項10】
移動体の周辺の地物を検出する検出部の検出結果に基づいて所定の処理を行う情報処理装置で実行される情報処理方法であって、
前記移動体とともに移動する前記検出部により検出された所定検出領域内における前記地物の検出結果を、所定の時間間隔で連続的に取得する取得工程と、
前記取得された複数の検出結果から、前記検出領域内における前記地物の特徴部分の位置情報を抽出する抽出工程と、
抽出された位置情報の時間的な変化に基づいて、前記移動体の速度を算出する算出工程と、を含み、
当該地物の前記移動体の移動方向に対応する長さが既知であって、前記地物の特徴部分は、当該地物の一端部と他端部であり、
前記位置情報の時間的な変化は、前記一端部の検出開始から他端部の検出開始までの経過時間、及び一端部の検出終了から他端部の検出終了までの経過時間の少なくとも一方である、
ことを特徴とする情報処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の周辺の地物を検出する検出部の検出結果に基づいて所定の処理を行う情報処理装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば、近年開発が進められている自動走行システムは、車両周辺に存在する物体の認識による状況把握を行い、最適な目標軌道を生成し、その目標軌道に沿って走行するように車両の制御を行う。この時、もし車両の自己位置推定精度が悪いと、実走行軌道が目標軌道から逸脱する可能性が生じ自動走行の安全性を低下させてしまう。自動走行の安全性を確保するためには、精度の良い自己位置推定は重要な要素のひとつである。
【0003】
従来のカーナビゲーションシステムにおける自己位置推定はGNSS(Global Navigation Satellite System)を用いることが多い。そのため、トンネル内などの受信不能な場所やビルの谷間などのマルチパスが多発する環境下では精度が悪化するという問題があった。
【0004】
そこで、車両の走行状態(例えば車両速度及びヨーレート)に基づいて車両位置を推定するいわゆるデッドレコニング技術が知られている。そして、デッドレコニングによる車両位置の推定精度を向上させるためには、上記した車両速度等の車両の走行状態を精度良く取得する必要がある。
【0005】
車両速度を精度良く取得する技術としては、例えば特許文献1に記載されているような車速パルスを補正することが知られている。特許文献1は、2つの地物間でカウントされた車輪速センサの出力パルスのカウント値Cpと、2つの地物間距離Dとの関係に基づいて、走行速度を求める際の演算式を補正することが記載されている。
【先行技術文献】
【特許文献】
【0006】
特開2008‐8783号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に記載の発明では、2つの地物間距離Dに基づいて演算式を補正しているため、2つの地物間距離Dの精度が低いと演算式の補正の精度も低下する場合がある。そのため、算出される車両速度の精度も低下することがある。
【0008】
本発明が解決しようとする課題としては、上述したような車両速度を精度良く取得することが一例として挙げられる。
【課題を解決するための手段】
【0009】
上記課題を解決するためになされた請求項1に記載の発明は、移動体の周辺の地物を検出する検出部の検出結果のうち、前記移動体とともに移動する所定検出領域内における前記地物の検出結果を、所定の時間間隔で連続的に取得する取得部と、前記取得された複数の検出結果から、前記検出領域内における前記地物の特徴部分の前記移動体の移動方向における位置情報を抽出する抽出部と、抽出された位置情報の時間的な変化に基づいて、前記移動体の速度を算出する算出部と、を備えることを特徴としている。
【0010】
また、請求項9に記載の発明は、移動体の周辺の地物を検出する検出部と、前記検出部の検出結果のうち、前記移動体とともに移動する所定検出領域内における前記地物の検出結果を、所定の時間間隔で連続的に取得する取得部と、前記取得された複数の検出結果から、前記検出領域内における前記地物の特徴部分の前記移動体の移動方向における位置情報を抽出する抽出部と、抽出された位置情報の時間的な変化に基づいて、前記移動体の速度を算出する算出部と、を備えることを特徴としている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
情報処理装置、情報処理方法および情報処理プログラム
2日前
パイオニア株式会社
情報処理装置、情報処理方法および情報処理プログラム
2日前
パイオニア株式会社
情報処理装置、情報処理方法および情報処理プログラム
2日前
個人
メジャー文具
5日前
日本精機株式会社
位置検出装置
11日前
ユニパルス株式会社
ロードセル
4日前
日本精機株式会社
位置検出装置
11日前
日本精機株式会社
位置検出装置
11日前
大和製衡株式会社
組合せ秤
16日前
大和製衡株式会社
組合せ秤
16日前
アズビル株式会社
圧力センサ
10日前
ダイキン工業株式会社
監視装置
2日前
トヨタ自動車株式会社
監視装置
3日前
株式会社ヨコオ
ソケット
3日前
株式会社ヨコオ
ソケット
4日前
株式会社ユーシン
操作検出装置
13日前
株式会社東芝
センサ
16日前
株式会社東芝
センサ
16日前
株式会社チノー
放射光測温装置
4日前
トヨタ自動車株式会社
検査装置
13日前
エイブリック株式会社
磁気センサ回路
10日前
TDK株式会社
ガスセンサ
4日前
株式会社ナリス化粧品
角層細胞採取用具
23日前
TDK株式会社
ガスセンサ
9日前
東レエンジニアリング株式会社
計量装置
13日前
TDK株式会社
磁気センサ
3日前
TDK株式会社
ガスセンサ
10日前
株式会社東芝
重量測定装置
9日前
中国電力株式会社
電柱管理システム
2日前
日本特殊陶業株式会社
センサ
2日前
日本特殊陶業株式会社
センサ
2日前
日本特殊陶業株式会社
センサ
2日前
日本特殊陶業株式会社
センサ
2日前
日本特殊陶業株式会社
センサ
2日前
株式会社熊谷組
RI計測装置
11日前
富士電機株式会社
エンコーダ
10日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ