TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123278
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2025096866,2024103739
出願日
2025-06-10,2016-12-27
発明の名称
走査方法の決定方法、および計測方法
出願人
パイオニア株式会社
代理人
個人
,
個人
主分類
G01S
7/481 20060101AFI20250815BHJP(測定;試験)
要約
【課題】計測装置における計測の効率を高める。
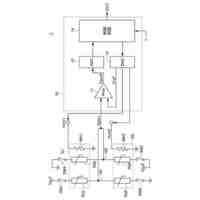
【解決手段】計測装置200は計測部202及び制御部204を有する。計測部202は、照射方向を変えながら電磁波を照射して走査を行う。制御部204は、N 回の連続する主走査で合計 M 回電磁波を照射し、前記 N 回の主走査において電磁波の照射タイミングが互いに異なり、各主走査で少なくとも1回電磁波が照射されるように、計測部202を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体に設置される計測装置の走査方法の決定方法であって、
前記計測装置は照射方向を変えながら電磁波を照射して走査を行う装置であり、
前記移動体が移動している際に生じる振動の周波数よりも高い周波数を、前記計測装置の主走査の走査周波数として決定し、
決定した前記主走査の走査周波数にて、1つの画素に対して、電磁波を照射しうる連続した主走査を複数行い、かつ前記複数の連続した主走査において前記1つの画素に対する電磁波の照射が1回となるように電磁波の照射タイミングを決定する、走査方法の決定方法。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の決定方法において、
所定の平面において、電磁波の複数のスポットが互いに重ならないように電磁波の照射タイミングを決定する決定方法。
【請求項3】
請求項1または2に記載の決定方法において、
電磁波のスポットの大きさを、画素の大きさに応じて設定する決定方法。
【請求項4】
請求項1から3のいずれか一項に記載の決定方法において、
前記計測装置は電磁波の照射方向を、主走査方向と副走査方向という2つの方向について時間と共に変化させることで、走査を行う装置であり、
主走査方向の走査周波数を副走査方向の走査周波数よりも高くする決定方法。
【請求項5】
請求項4に記載の決定方法において、
前記複数の連続する主走査において電磁波の照射タイミングが互いに異なり、各主走査で少なくとも1回電磁波が照射されるように電磁波の照射タイミングを決定する、決定方法。
【請求項6】
請求項5に記載の決定方法において、
N 回の連続する主走査で合計 M 回電磁波を照射し、前記 N 回の主走査において電磁波の照射タイミングが互いに異なり、各主走査で少なくとも1回電磁波が照射されるように走査方法を決定し、
副走査方向の走査間隔を dy とし、副走査方向の1画素の幅をAとすると、前記N は、A/dy以下の最大の整数及びA/dy以上の最小の整数のいずれか一方であり、
主走査方向のスキャン範囲の幅を X とし、主走査方向の1 画素の幅を B とすると、前記 M は、X/B 以上の最小の整数及び X/B 以下の最大の整数のいずれか一方である決定方法。
【請求項7】
請求項6に記載の決定方法において、
前記 N 回の主走査それぞれにおける電磁波の照射回数を、M/N 以上の最小の整数及び M/N 以下の最大の整数のうちのいずれか一方とする決定方法。
【請求項8】
請求項6または7に記載の決定方法において、
前記Mは、前記複数の連続する主走査において前記計測装置に求められる解像度の画素数である、決定方法。
【請求項9】
請求項1から8のいずれか一項に記載の決定方法において、
各主走査において電磁波を等間隔に照射させるよう決定する決定方法。
【請求項10】
請求項1から9のいずれか一項に記載の決定方法で決定された走査方法で、前記計測装置が走査する計測方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電磁波を照射して計測を行う技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
電磁波を照射して物体を走査することで障害物などの検出を行う技術が開発されている。特許文献1は、自動車等に設置される装置において、レーザ光を照射して目標領域内でスキャンを行うことで、障害物などの検出を行う技術を開示している。また特許文献1では、自動車の操舵角度に応じて、スキャン領域の横方向の中心軸を変更する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2006-258604号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に示すような計測装置では、求められる解像度(測定の粒度)以上の粒度で計測が行われることがあり、電力が無駄に消費されるなどの問題がある。
【0005】
本発明は、上述の課題鑑みてなされたものであり、計測装置による計測の効率を高くする技術を提供することを一つの目的とする。
【課題を解決するための手段】
【0006】
第1の発明は、
移動体に設置される計測装置の走査方法の決定方法であって、
前記計測装置は照射方向を変えながら電磁波を照射して走査を行う装置であり、
前記移動体が移動している際に生じる振動の周波数よりも高い周波数を、前記計測装置の主走査の走査周波数として決定し、
決定した前記主走査の走査周波数にて、主走査方向に一列に並んだ複数の画素に対して、複数の連続する主走査の合計で、各画素に1回ずつ電磁波が照射されるように、電磁波の照射タイミングを決定する、走査方法の決定方法である。
【0007】
第2の発明は、
上記の決定方法で決定された走査方法で、前記計測装置が走査する計測方法である。
【図面の簡単な説明】
【0008】
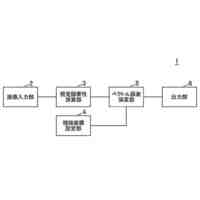
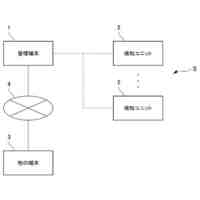
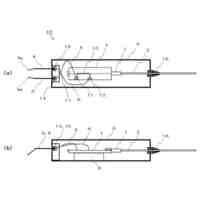
実施形態1に係る計測装置を例示する図である。
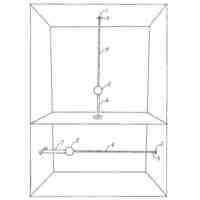
一般的な計測装置による揺動走査を概念的に例示する図である。
一般的な計測装置による揺動走査の走査範囲を xy 平面について平面視した図である。
一般的な計測装置による回転走査を概念的に例示する図である。
一般的な計測装置による回転走査の走査範囲を xy 平面に展開して平面視した図である。
図3から軌跡を除いた図である。
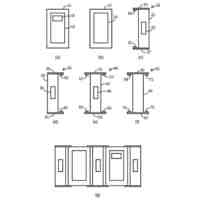
電磁波のスポットの重なりを例示する図である。
本実施形態の計測装置による揺動走査の走査範囲を、xy 平面で平面視した様子を例示する図である。
図8から軌跡を除いた図である。
図9における各電磁波のスポットを例示する図である。
本実施形態の計測装置による回転走査の走査範囲を、xy 平面で展開して平面視した様子を例示する図である。
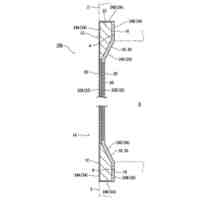
図8で示した計測装置による揺動走査の一部を表す図である。
計測装置による回転走査の一部を表す図である。
主走査方向の走査周波数を低くした例を示す図である。
計測装置によって電磁波が等間隔で照射されるケースを例示する図である。
各主走査において最初に電磁波が照射される画素について説明するための図である。
各主走査で電磁波が照射される回数の差が1以下であるケースを例示する図である。
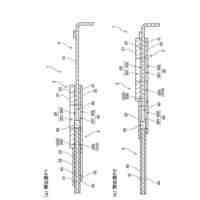
制御部のハードウエア構成を例示する図である。
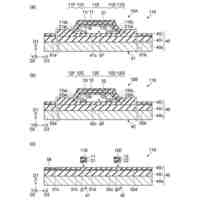
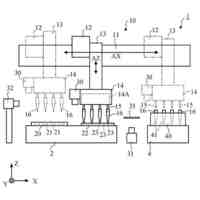
計測部のハードウエア構成を例示する図である。
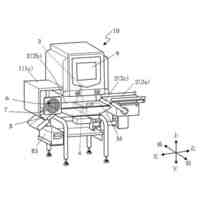
光を照射する計測部のハードウエア構成を例示する図である。
走査器を介さずに反射波が受信される計測装置のハードウエア構成を例示する図である。
光源駆動信号を例示する図である。
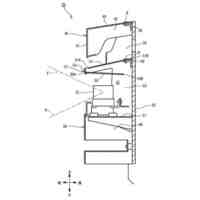
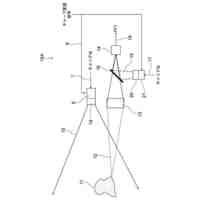
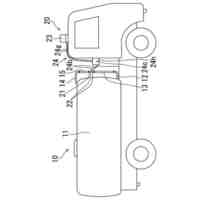
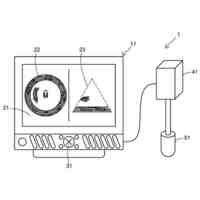
移動体に設置されている計測装置を例示する図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態について、図面を用いて説明する。尚、すべての図面において、同様な構成要素には同様の符号を付し、適宜説明を省略する。また、特に断らない限り、各ブロックは、ハードウエア単位の構成ではなく、機能単位の構成を表している。
【0010】
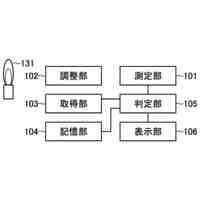
図1は、実施形態1に係る計測装置200を例示する図である。計測装置200は、計測部202及び制御部204を有する。計測部202は、照射方向を変えながら電磁波を照射し、照射した電磁波の反射波を受信することで、物体を走査する。制御部204は、計測部202による走査を制御する。さらに制御部204は、計測部202によって電磁波が照射されてからその電磁波の反射波が受信されるまでの時間を測定する。この測定結果は、例えば、上記電磁波を反射した物体と計測装置200との距離を把握するため(いわゆる測距)に利用される。計測装置200は、例えばライダ(Lidar:Light Detection and Ranging)センサやミリ波レーダなどである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
状況出力装置
1日前
パイオニア株式会社
リスク情報出力装置
1日前
パイオニア株式会社
情報処理装置及び情報処理方法
1日前
パイオニア株式会社
出力装置、制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、情報処理方法および情報処理プログラム
1日前
個人
微小振動検出装置
今日
ユニパルス株式会社
力変換器
21日前
株式会社イシダ
X線検査装置
今日
三菱電機株式会社
計測器
15日前
横浜ゴム株式会社
音響窓
23日前
株式会社豊田自動織機
産業車両
28日前
日置電機株式会社
測定装置
22日前
株式会社辰巳菱機
システム
9日前
個人
センサーを備えた装置
25日前
日本精機株式会社
施工管理システム
25日前
IPU株式会社
距離検出装置
21日前
株式会社FRPカジ
FRP装置
11日前
株式会社東芝
センサ
今日
株式会社東芝
センサ
24日前
株式会社精工技研
光電圧プローブ
1日前
株式会社田中設備
報知装置
29日前
大和製衡株式会社
組合せ計量装置
11日前
富士レビオ株式会社
嵌合システム
14日前
株式会社カワタ
サンプリング装置
4日前
TDK株式会社
ガスセンサ
3日前
株式会社CAST
センサ固定治具
28日前
学校法人立命館
液面レベルセンサ
8日前
日本精工株式会社
分注装置
7日前
本多電子株式会社
超音波ソナー装置
16日前
富士電機株式会社
半導体パッケージ
17日前
三菱マテリアル株式会社
温度センサ
7日前
株式会社熊平製作所
刃物類判別装置
28日前
アズビル株式会社
火炎状態判定装置
22日前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
1か月前
戸田建設株式会社
測量機
7日前
トヨタ自動車株式会社
表面傷の検査方法
23日前
続きを見る
他の特許を見る











 特許ウォッチ
特許ウォッチ