TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025129201
公報種別
公開特許公報(A)
公開日
2025-09-04
出願番号
2025106919,2023546672
出願日
2025-06-25,2021-09-10
発明の名称
情報処理装置、判定方法、プログラム及び記憶媒体
出願人
パイオニア株式会社
,
パイオニアスマートセンシングイノベーションズ株式会社
代理人
個人
主分類
B63B
49/00 20060101AFI20250828BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】高さ方向の高精度な自己位置推定結果が得られない場合においても、船舶の最高点の高さを的確に算出することが可能な情報処理装置を提供する。
【解決手段】情報処理装置1のコントローラ13は、船舶に設けられたライダ3が計測した地物の計測データと、水面の計測データとを取得する。また、コントローラ13は、地物の高さに関する情報を河川地図DB10から取得する。そして、コントローラ13は、船舶の基準位置から船舶の最高点までの高さに関する最高点情報IHを取得する。そして、コントローラ13は、地物の計測データと、水面の計測データと、地物の高さに関する情報と、最高点情報IHとに基づき、船舶最高点高を算出する。
【選択図】図5
特許請求の範囲
【請求項1】
船舶に設けられた計測装置が計測した地物の計測データである地物計測データと、前記計測装置が計測した水面の計測データである水面計測データとを取得する第1取得手段と、
前記地物の高さに関する情報を地図データから取得する第2取得手段と、
前記地物計測データと、前記水面計測データと、前記地物の高さに関する情報と、前記船舶の基準位置から前記船舶の最高点までの高さに関する最高点情報とに基づき、前記最高点の高さである船舶最高点高を算出する船舶最高点高算出手段と、
を有する情報処理装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、船舶の橋梁下の通過可否の判定に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来から、レーザスキャナなどの計測装置を用いて計測した周辺物体の形状データを、予め周辺物体の形状が記憶された地図情報と照合(マッチング)することで、移動体の自己位置を推定する技術が知られている。例えば、特許文献1には、空間を所定の規則で分割したボクセル中における検出物が静止物か移動物かを判定し、静止物が存在するボクセルを対象として地図情報と計測データとのマッチングを行う自律移動システムが開示されている。また、特許文献2には、ボクセル毎の静止物体の平均ベクトルと共分散行列とを含むボクセルデータとライダが出力する点群データとの照合により自己位置推定を行うスキャンマッチング手法が開示されている。さらに、特許文献3には、船舶の自動着岸を行う自動着岸装置において、ライダから照射される光が着岸位置の周囲の物体に反射してライダにより受光できるように、船舶の姿勢を変化させる制御を行う手法が記載されている。
【先行技術文献】
【特許文献】
【0003】
国際公開WO2013/076829
国際公開WO2018/221453
特開2020-59403号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
運航ルートを決める際,潮位予測情報等から橋梁を安全に通過できるルートを選択するのが一般的である。しかし、船舶が本当に通過できるか否かは、潮位予測よりも水位が高くなる場合等も勘案し、その橋に差し掛かる前に確認する必要がある。そして、橋梁を通過するのにリスクがあると前もって判定した場合、川幅が広く他船の居ない状況で引き返すことやルートを変更することなどの対応を行うことが可能となる。このように、船舶が橋梁下を通過できるか否かを先立って判断することは安全な運航にとって大切である。そして、このような船舶の橋梁下の通過可否判定では、船舶の最高点の高さを的確に認識する必要がある。一方、自己位置推定システムが搭載されていない船舶では、自己位置推定結果によらずに船舶の最高点の高さを算出する必要がある。このことは、平面座標のみ自己位置推定を行う船舶、又は、高さ方向の自己位置推定を行うものの推定精度が低い船舶についても同様である。
【0005】
本開示は、上記のような課題を解決するためになされたものであり、高さ方向の高精度な自己位置推定結果が得られない場合においても、船舶の最高点の高さを的確に算出することが可能な情報処理装置を提供することを主な目的の1つとする。
【課題を解決するための手段】
【0006】
請求項に記載の発明は、
船舶に設けられた計測装置が計測した地物の計測データである地物計測データと、前記計測装置が計測した水面の計測データである水面計測データとを取得する第1取得手段と、
前記地物の高さに関する情報を地図データから取得する第2取得手段と、
前記地物計測データと、前記水面計測データと、前記地物の高さに関する情報と、前記船舶の基準位置から前記船舶の最高点までの高さに関する最高点情報とに基づき、前記最高点の高さである船舶最高点高を算出する船舶最高点高算出手段と、
を有する情報処理装置である。
【0007】
また、請求項に記載の発明は、
コンピュータが実行する制御方法であって、
船舶に設けられた計測装置が計測した地物の計測データである地物計測データと、前記計測装置が計測した水面の計測データである水面計測データとを取得し、
前記地物の高さに関する情報を地図データから取得し、
前記地物計測データと、前記水面計測データと、前記地物の高さに関する情報と、前記船舶の基準位置から前記船舶の最高点までの高さに関する最高点情報とに基づき、前記最高点の高さである船舶最高点高を算出する、
制御方法である。
【0008】
また、請求項に記載の発明は、
船舶に設けられた計測装置が計測した地物の計測データである地物計測データと、前記計測装置が計測した水面の計測データである水面計測データとを取得し、
前記地物の高さに関する情報を地図データから取得し、
前記地物計測データと、前記水面計測データと、前記地物の高さに関する情報と、前記船舶の基準位置から前記船舶の最高点までの高さに関する最高点情報とに基づき、前記最高点の高さである船舶最高点高を算出する処理をコンピュータに実行させるプログラムである。
【図面の簡単な説明】
【0009】
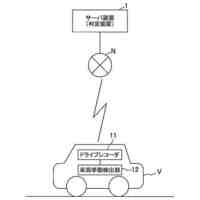
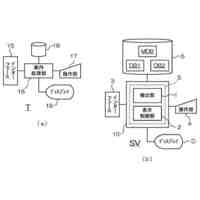
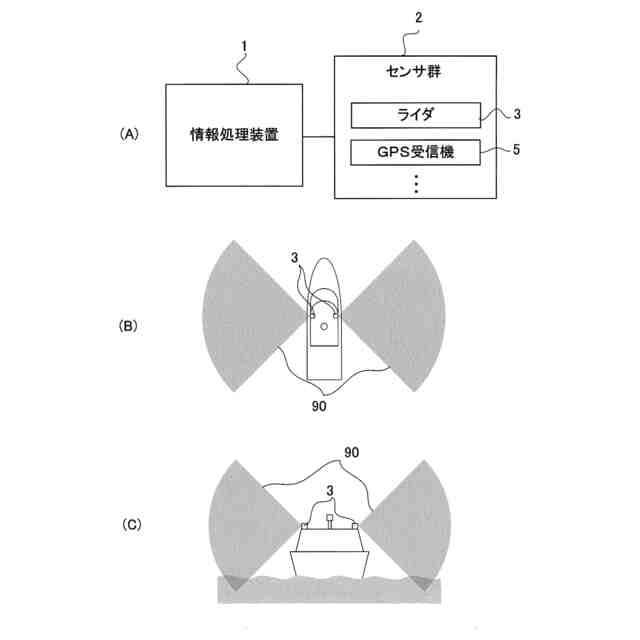
運航支援システムの概略構成図である。
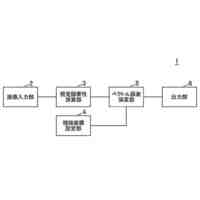
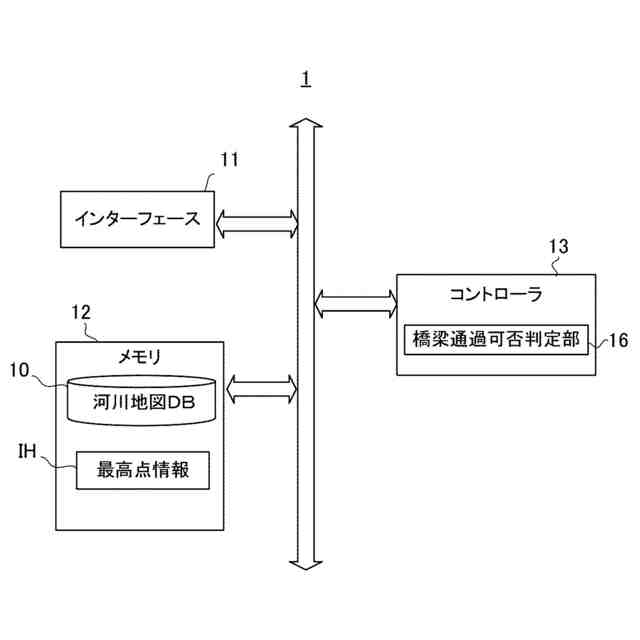
情報処理装置の機能的構成を示すブロック図である。
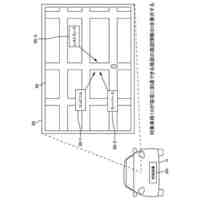
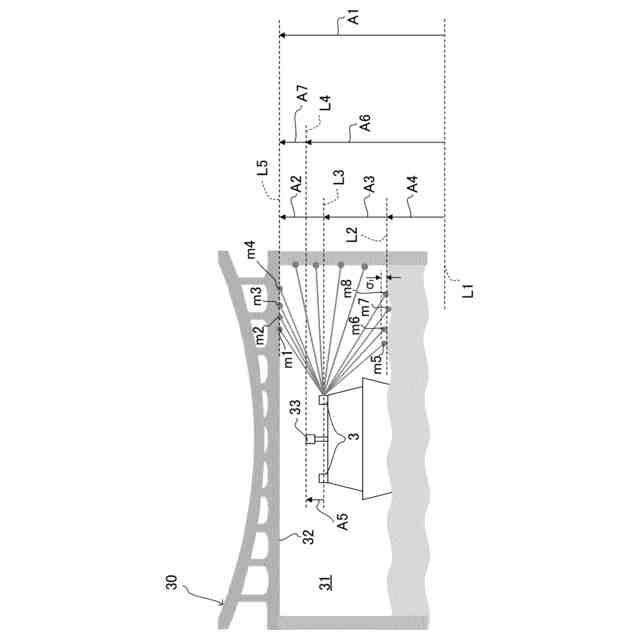
橋梁通過可否判定処理の概要を示す図である。
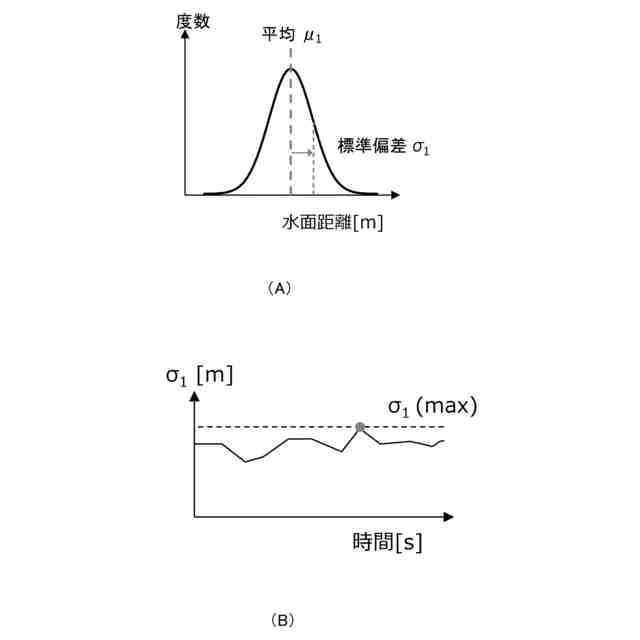
(A)水面距離の度数分布を示す。(B)水面距離の標準偏差の時間遷移のグラフの一例を示す。
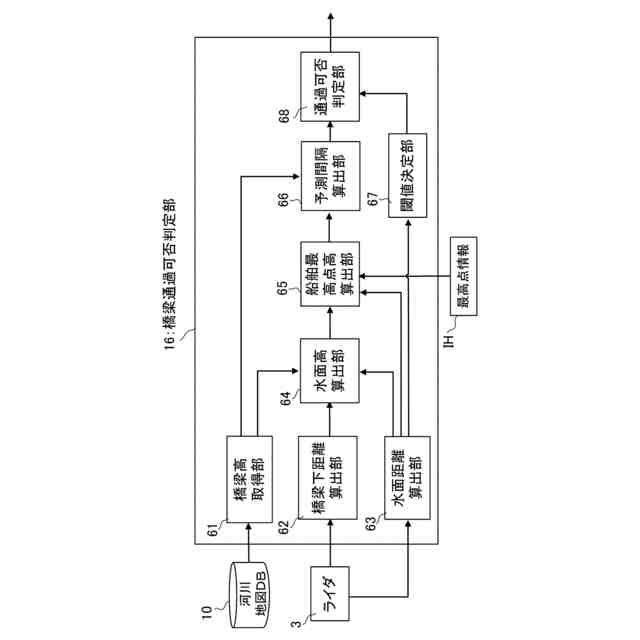
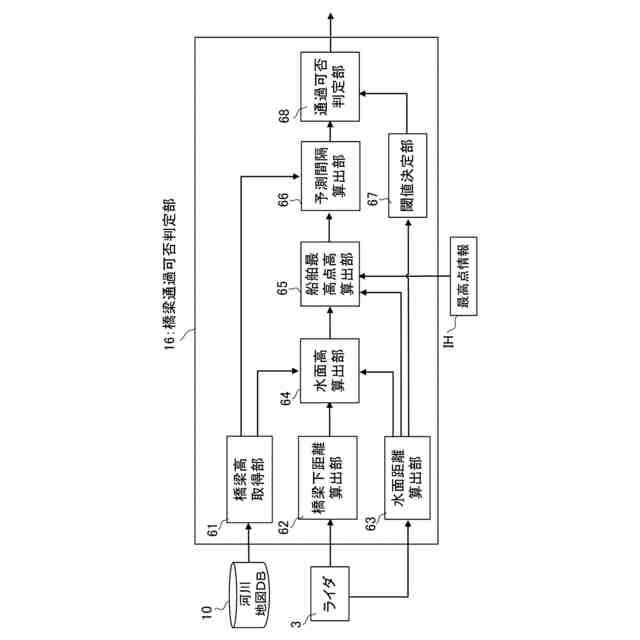
橋梁通過可否判定部の機能ブロックの一例である。
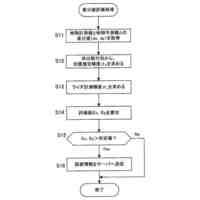
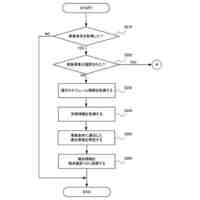
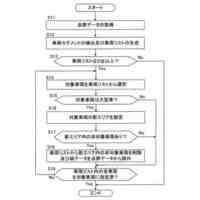
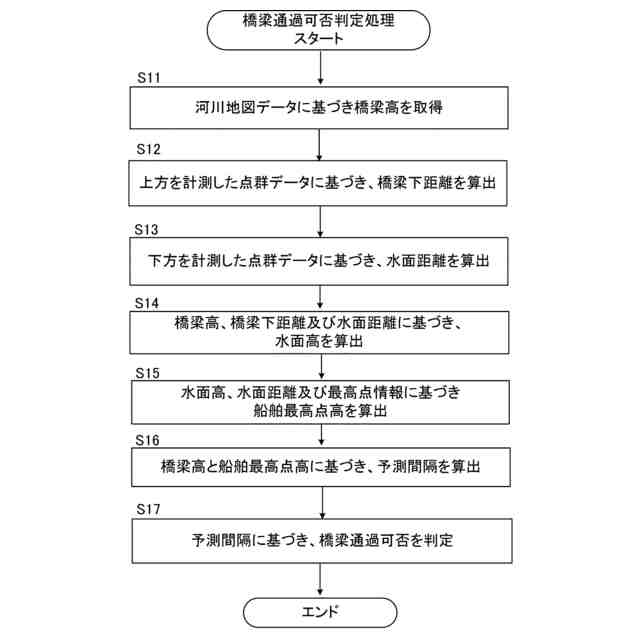
橋梁通過可否判定処理のフローチャートの一例である。
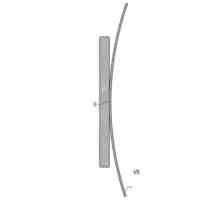
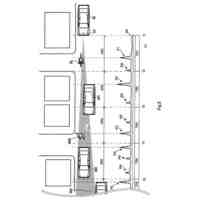
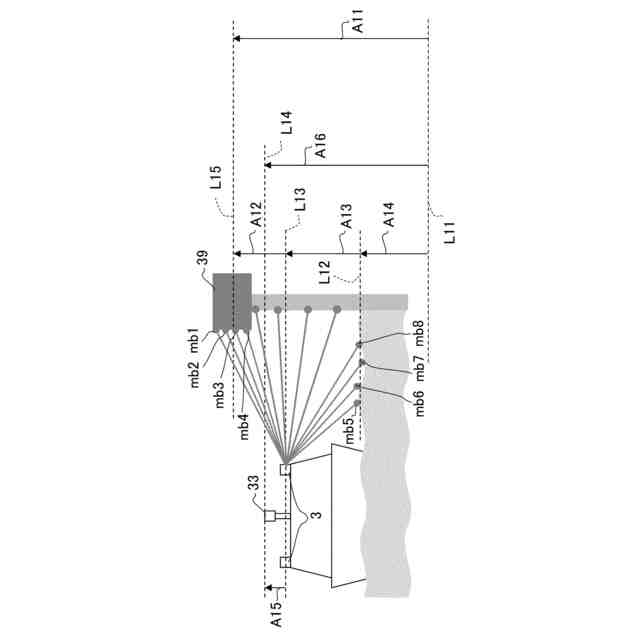
船舶と橋梁との予測間隔を算出済みの橋梁を通過する船舶を後方から観察した図である。
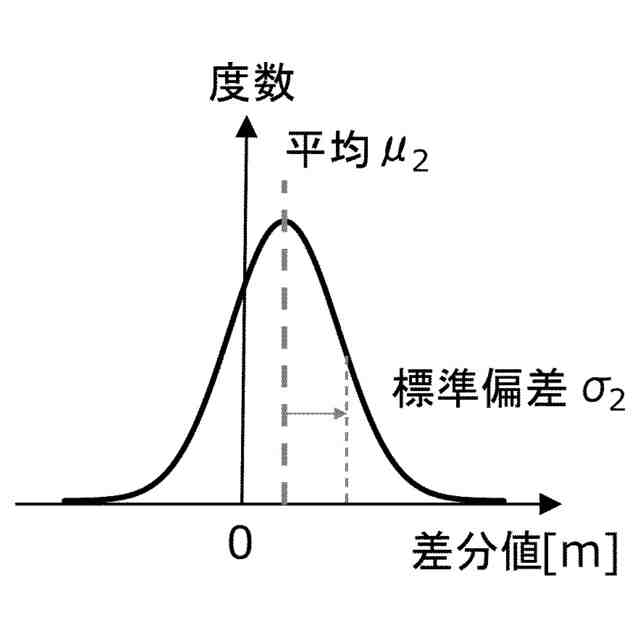
予測間隔と実測間隔の差分値の度数分布を示す。
変形例における橋梁通過可否判定処理の概要を示す図である。
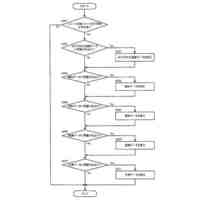
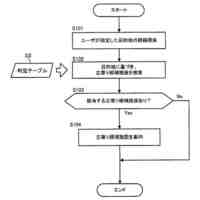
変形例における橋梁通過可否判定処理の手順を示すフローチャートの一例である。
【発明を実施するための形態】
【0010】
本発明の好適な実施形態によれば、情報処理装置は、船舶に設けられた計測装置が計測した地物の計測データである地物計測データと、前記計測装置が計測した水面の計測データである水面計測データとを取得する第1取得手段と、前記地物の高さに関する情報を地図データから取得する第2取得手段と、前記地物計測データと、前記水面計測データと、前記地物の高さに関する情報と、前記船舶の基準位置から前記船舶の最高点までの高さに関する最高点情報とに基づき、前記最高点の高さである船舶最高点高を算出する船舶最高点高算出手段と、を有する。この態様によれば、情報処理装置は、自己位置推定結果を用いることなく、船舶の最高点の高さを的確に算出することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
探索装置
1か月前
パイオニア株式会社
判定装置
17日前
パイオニア株式会社
制御装置
24日前
パイオニア株式会社
取付機構
6日前
パイオニア株式会社
サーバ装置
4日前
パイオニア株式会社
距離算出装置
13日前
パイオニア株式会社
情報表示装置
17日前
パイオニア株式会社
状況出力装置
11日前
パイオニア株式会社
情報処理装置
17日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
17日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
17日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
17日前
パイオニア株式会社
情報処理装置
4日前
パイオニア株式会社
情報処理装置
24日前
パイオニア株式会社
情報処理装置
26日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
14日前
パイオニア株式会社
ミラースキャナ
17日前
パイオニア株式会社
アクチュエータ
24日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
14日前
パイオニア株式会社
データ処理装置
17日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
14日前
パイオニア株式会社
リスク情報出力装置
11日前
パイオニア株式会社
振動発生装置、振動発生方法
6日前
パイオニア株式会社
情報処理装置及び情報処理方法
11日前
パイオニア株式会社
情報処理装置及び情報処理方法
4日前
パイオニア株式会社
センサ装置、筐体及びカバー部
4日前
パイオニア株式会社
調整方法、検出機器及び検出装置
24日前
パイオニア株式会社
走査方法の決定方法、および計測方法
17日前
パイオニア株式会社
評価装置、評価方法及び評価プログラム
4日前
パイオニア株式会社
出力装置、制御方法、プログラム及び記憶媒体
13日前
パイオニア株式会社
表示装置、制御方法、プログラム及び記憶媒体
13日前
パイオニア株式会社
情報処理装置、方法、プログラム及び記憶媒体
24日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
17日前
パイオニア株式会社
情報処理装置、判定方法、プログラム及び記憶媒体
4日前
パイオニア株式会社
経路案内装置、制御方法、プログラム及び記憶媒体
1か月前
パイオニア株式会社
表示制御装置、制御方法、プログラム及び記憶媒体
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ