TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123341
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2025098490,2023147040
出願日
2025-06-12,2020-03-31
発明の名称
位置推定装置、推定装置、制御方法、プログラム及び記憶媒体
出願人
パイオニア株式会社
代理人
個人
主分類
G01C
21/28 20060101AFI20250815BHJP(測定;試験)
要約
【課題】検出できるランドマークの数が少ない状況であっても、好適に自車位置推定を行うことが可能な位置推定装置を提供する。
【解決手段】車載機1の自車位置推定部17は、移動体の現在位置と方位との予測値である予測自車位置X
-
(t)を取得する。そして、自車位置推定部17は、ライダ2によるランドマークの計測データに基づく車両に対するランドマークの向きを示す第1向き情報である相対角度L
ψ
(t)を取得し、かつ、ランドマーク情報に含まれるランドマークの向きを車両に対する向きに変換した向きを示す第2向き情報である相対角度L
ψ
-
(t)を取得する。そして、自車位置推定部17は、相対角度L
ψ
(t)と相対角度L
ψ
-
(t)との差分に基づいて、予測自車位置X
-
(t)を補正する。
【選択図】図9
特許請求の範囲
【請求項1】
移動体の現在位置と、前記移動体の向きと、を含む予測値を取得する取得部と、
前記移動体に搭載された計測装置による地物の計測値に基づき、前記移動体の座標系における前記地物の向きを示す第1方向を算出する第1算出部と、
地図情報に含まれる前記地物の向く方位を前記移動体の座標系に変換した向きを示す第2方向を算出する第2算出部と、
前記第1方向と前記第2方向との差分に第1のカルマンゲインを乗じた値により、前記現在位置の前記予測値を補正し、前記差分に第2のカルマンゲインを乗じた値により、前記向きの前記予測値を補正する補正部と、
を有する位置推定装置。
続きを表示(約 1,300 文字)
【請求項2】
前記補正部は、前記差分である第1差分と、前記移動体から前記地物までの前記計測装置による計測距離と、前記地図情報に含まれる前記地物の位置情報に基づき予測された前記移動体から前記地物までの予測距離と、の第2差分とに基づき、前記予測値を補正する請求項1に記載の位置推定装置。
【請求項3】
前記補正部は、前記差分にカルマンゲインを乗じた値により、前記予測値を補正する請求項1または2に記載の位置推定装置。
【請求項4】
前記計測装置の距離の計測精度に基づき、前記第1方向の計測精度を算出する第3算出部を備え、
前記補正部は、前記カルマンゲインの算出に用いる観測雑音係数を、前記距離及び向きの計測精度に基づき決定する請求項1~3のいずれか一項に記載の位置推定装置。
【請求項5】
移動体に搭載された計測装置による地物の計測値に基づく前記移動体の座標系における前記地物の向きを示す第1方向を算出する第1算出部と、
地図情報に含まれる前記地物の向く方位を前記移動体の座標系に変換した向きを示す第2方向を算出する第2算出部と、
前記第1方向と前記第2方向との差分に第1のカルマンゲインを乗じた値により、前記前記移動体の現在位置を推定し、前記差分に第2のカルマンゲインを乗じた値により、前記移動体の向きを推定する推定部と、
を備える推定装置。
【請求項6】
位置推定装置が実行する制御方法であって、
移動体の現在位置と、前記移動体の向きと、を含む予測値を取得する取得工程と、
前記移動体に搭載された計測装置による地物の計測値に基づき、前記移動体の座標系における前記地物の向きを示す第1方向を算出する第1算出工程と、
地図情報に含まれる前記地物の向く方位を前記移動体の座標系に変換した向きを示す第2方向を算出する第2算出工程と、
前記第1方向と前記第2方向との差分に第1のカルマンゲインを乗じた値により、前記現在位置の前記予測値を補正し、前記差分に第2のカルマンゲインを乗じた値により、前記向きの前記予測値を補正する補正工程と、
を有する制御方法。
【請求項7】
コンピュータが実行するプログラムであって、
移動体の現在位置と、前記移動体の向きと、を含む予測値を取得する取得部と、
前記移動体に搭載された計測装置による地物の計測値に基づき、前記移動体の座標系における前記地物の向きを示す第1方向を算出する第1算出部と、
地図情報に含まれる前記地物の向く方位を前記移動体の座標系に変換した向きを示す第2方向を算出する第2算出部と、
前記第1方向と前記第2方向との差分に第1のカルマンゲインを乗じた値により、前記現在位置の前記予測値を補正し、前記差分に第2のカルマンゲインを乗じた値により、前記向きの前記予測値を補正する補正部
として前記コンピュータを機能させるプログラム。
【請求項8】
請求項7に記載のプログラムを記憶する記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置推定技術に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来から、車両の進行先に設置される地物をレーダやカメラを用いて検出し、その検出結果に基づいて自車位置を校正する技術が知られている。例えば、特許文献1には、計測センサの出力と、予め地図上に登録された地物の位置情報とを照合させることで自己位置を推定する技術が開示されている。また、特許文献2には、カルマンフィルタを用いた自車位置推定技術が開示されている。さらに、特許文献3には、ライダが計測した標識の点群データに基づき、標識の向きを示す法線角度を算出する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-257742号公報
特開2017-072422号公報
特開2017-211307号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
高速道路や主要国道など、道路標識や白線が整備されている道路においては,地図と計測値を照合できるランドマーク数が多い。一方、郊外においては、道路によってランドマークが少なく、例えば1つの道路標識しか検出できなかったり、片側の白線しか検出できなかったりする場所も存在する。また、高性能な外界センサを搭載している場合は十分な距離と角度範囲を計測可能であるが、比較的低価格の外界センサでは、計測可能距離が短かったり,検出角度も狭かったりする。その場合、道路上には多くのランドマークがあったとしても、計測できるランドマーク数が少なくなってしまう。
【0005】
本発明は、上記のような課題を解決するためになされたものであり、本発明は,検出できるランドマークの数が少ない状況であっても、好適に自車位置推定を行うことを主な目的とする。
【課題を解決するための手段】
【0006】
請求項に記載の発明は、
位置推定装置であって、
移動体の現在位置と、前記移動体の向きと、を含む予測値を取得する取得部と、
前記移動体に搭載された計測装置による地物の計測値に基づき、前記移動体の座標系における前記地物の向きを示す第1方向を算出する第1算出部と、
地図情報に含まれる前記地物の向く方位を前記移動体の座標系に変換した向きを示す第2方向を算出する第2算出部と、
前記第1方向と前記第2方向との差分に第1のカルマンゲインを乗じた値により、前記現在位置の前記予測値を補正し、前記差分に第2のカルマンゲインを乗じた値により、前記向きの前記予測値を補正する補正部と、
を有する。
【0007】
また、請求項に記載の発明は、推定装置であって、
移動体に搭載された計測装置による地物の計測値に基づく前記移動体の座標系における前記地物の向きを示す第1方向を算出する第1算出部と、
地図情報に含まれる前記地物の向く方位を前記移動体の座標系に変換した向きを示す第2方向を算出する第2算出部と、
前記第1方向と前記第2方向との差分に第1のカルマンゲインを乗じた値により、前記前記移動体の現在位置を推定し、前記差分に第2のカルマンゲインを乗じた値により、前記移動体の向きを推定する推定部と、
を有する。
【0008】
また、請求項に記載の発明は、位置推定装置が実行する制御方法であって、
移動体の現在位置と、前記移動体の向きと、を含む予測値を取得する取得工程と、
前記移動体に搭載された計測装置による地物の計測値に基づき、前記移動体の座標系における前記地物の向きを示す第1方向を算出する第1算出工程と、
地図情報に含まれる前記地物の向く方位を前記移動体の座標系に変換した向きを示す第2方向を算出する第2算出工程と、
前記第1方向と前記第2方向との差分に第1のカルマンゲインを乗じた値により、前記現在位置の前記予測値を補正し、前記差分に第2のカルマンゲインを乗じた値により、前記向きの前記予測値を補正する補正工程と、
を有する。
【0009】
また、請求項に記載の発明は、
コンピュータが実行するプログラムであって、
移動体の現在位置と、前記移動体の向きと、を含む予測値を取得する取得部と、
前記移動体に搭載された計測装置による地物の計測値に基づき、前記移動体の座標系における前記地物の向きを示す第1方向を算出する第1算出部と、
地図情報に含まれる前記地物の向く方位を前記移動体の座標系に変換した向きを示す第2方向を算出する第2算出部と、
前記第1方向と前記第2方向との差分に第1のカルマンゲインを乗じた値により、前記現在位置の前記予測値を補正し、前記差分に第2のカルマンゲインを乗じた値により、前記向きの前記予測値を補正する補正部
として前記コンピュータを機能させる。
【図面の簡単な説明】
【0010】
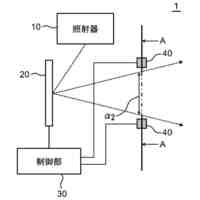
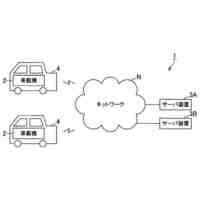
運転支援システムの概略構成図である。
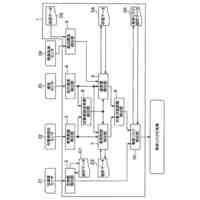
車載機の機能的構成を示すブロック図である。
地図DBのデータ構造の一例である。
状態変数ベクトルを2次元直交座標で表した図である。
予測ステップと計測更新ステップとの概略的な関係を示す図である。
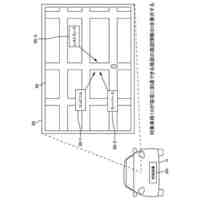
車両とランドマークとの位置関係をワールド座標系及び車両座標系において示した図である。
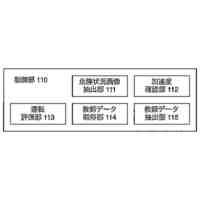
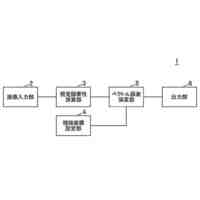
自車位置推定部の機能ブロックの一例を示す。
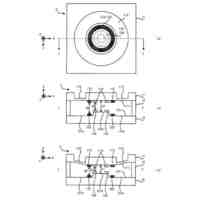
(A)ライダによる計測点を明示したランドマークの被照射面の正面図を示す。(B)区画線が破線である場合の予測ウィンドウ内の走査ライン及び各走査ラインの中心点を示した図である。(C)区画線が劣化している場合の予測ウィンドウ内の走査ライン及び各走査ラインの中心点を示した図である。
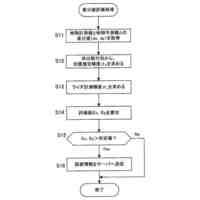
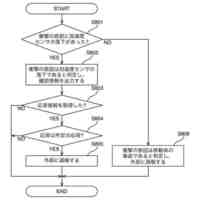
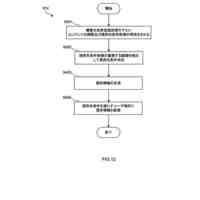
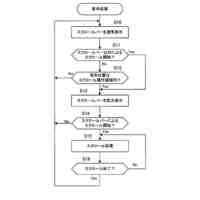
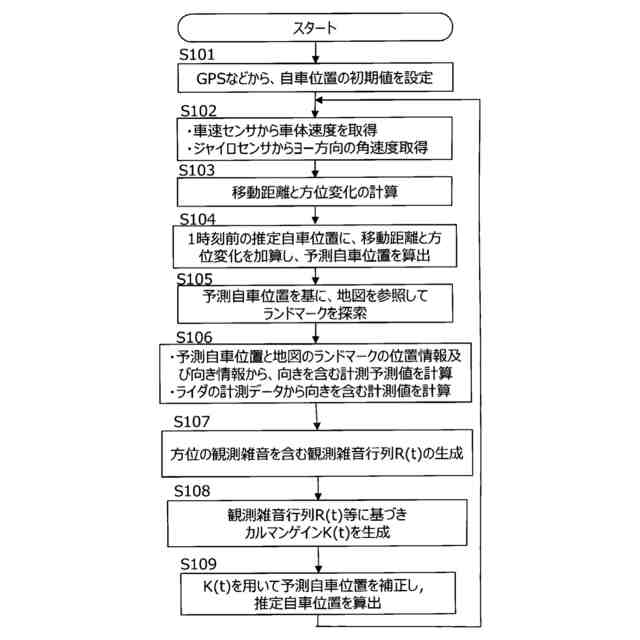
自車位置推定処理のフローチャートである。
車両とランドマークとの位置関係をワールド座標系及び車両座標系において示した図である。
比較例に係るカルマンフィルタに基づく自車位置推定のシミュレーション結果を示す図である。
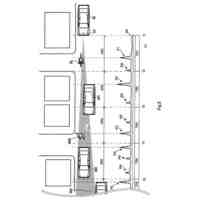
実施例に係るカルマンフィルタに基づく車両の推定位置の軌跡を車両の正しい位置及びランドマークの位置と共に示した平面図である。
(A)真値に対する推定値のx方向の誤差を示したグラフである。(B)真値に対する推定値のy方向の誤差を示したグラフである。(C)真値に対する推定値の方位ψの誤差を示したグラフである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
測定装置
1か月前
パイオニア株式会社
制御装置
17日前
パイオニア株式会社
判定装置
10日前
パイオニア株式会社
探索装置
25日前
パイオニア株式会社
制御装置
25日前
パイオニア株式会社
情報表示装置
10日前
パイオニア株式会社
情報処理装置
19日前
パイオニア株式会社
情報処理装置
17日前
パイオニア株式会社
情報処理装置
25日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
10日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
10日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
10日前
パイオニア株式会社
情報処理装置
10日前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
距離算出装置
6日前
パイオニア株式会社
状況出力装置
4日前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
アクチュエータ
17日前
パイオニア株式会社
ミラースキャナ
10日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
7日前
パイオニア株式会社
データ処理装置
10日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
7日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
7日前
パイオニア株式会社
運転指標出力装置
25日前
パイオニア株式会社
リスク情報出力装置
4日前
パイオニア株式会社
情報処理装置及び情報処理方法
4日前
パイオニア株式会社
調整方法、検出機器及び検出装置
17日前
パイオニア株式会社
表示装置、表示方法及びプログラム
25日前
パイオニア株式会社
走査方法の決定方法、および計測方法
10日前
パイオニア株式会社
表示装置、制御方法、プログラム及び記憶媒体
6日前
パイオニア株式会社
情報処理装置、方法、プログラム及び記憶媒体
17日前
パイオニア株式会社
出力装置、制御方法、プログラム及び記憶媒体
6日前
パイオニア株式会社
表示制御装置、制御方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
17日前
パイオニア株式会社
経路案内装置、制御方法、プログラム及び記憶媒体
25日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ