TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025106465
公報種別
公開特許公報(A)
公開日
2025-07-15
出願番号
2025064227,2023155448
出願日
2025-04-09,2019-08-26
発明の名称
地図データ生成方法
出願人
パイオニア株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/00 20060101AFI20250708BHJP(信号)
要約
【課題】詳細な情報を含む地図データを生成することができる地図データ生成方法を提供する。
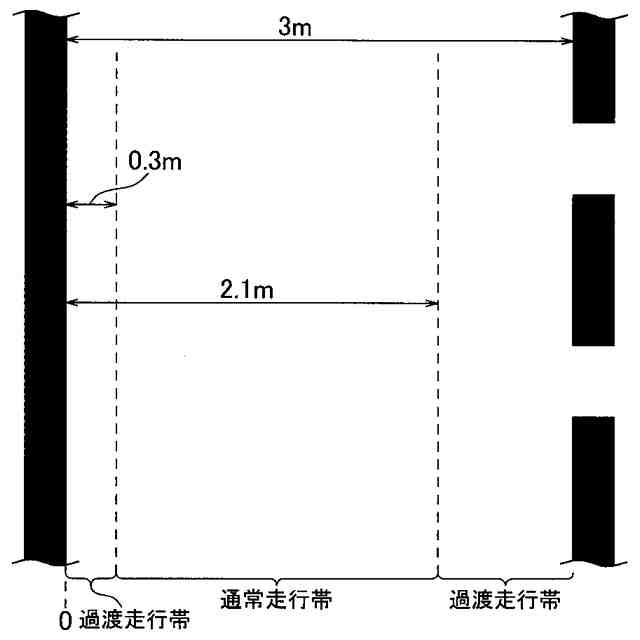
【解決手段】複数の車両2の道路幅方向の位置についてヒストグラムを作成し、極大値となる位置と、ばらつきである分散σと、に基づいて通常走行帯情報と過渡走行帯情報とを生成する。これにより、単に車両が走行可能か否かを示すレーン幅情報よりも詳細な情報を地図データに含めることができる。
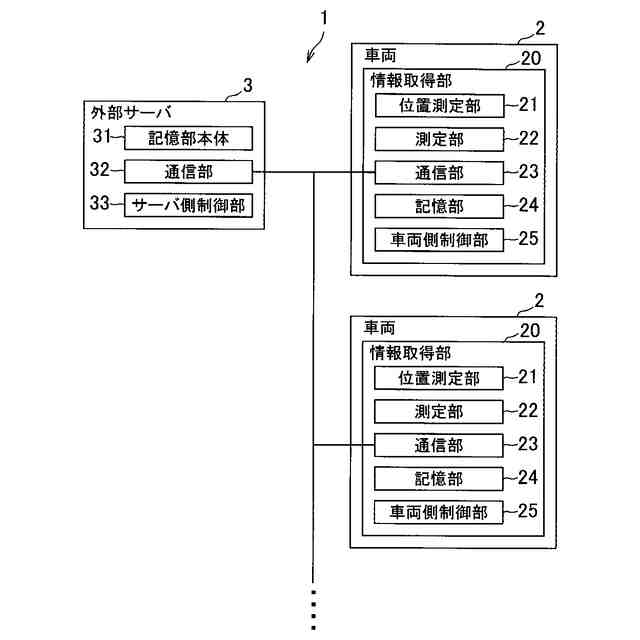
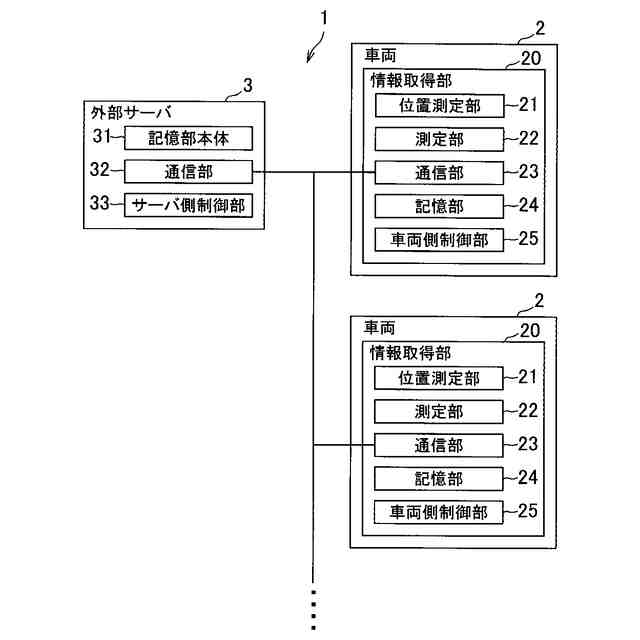
【選択図】図1
特許請求の範囲
【請求項1】
サーバにより実行される評価方法であって、
測定移動体に搭載された測定部によって測定された周辺情報と、予め記憶された道路情報と、を比較することにより、前記道路情報に対する、前記周辺情報に含まれる移動体の道路幅方向の位置を算出する算出工程と、前記道路情報に対する複数の移動体の道路幅方向の位置の分布に基づき、分布密度が所定値以上の範囲を示す第1情報と、前記第1情報の範囲の外側範囲を示す第2情報と、のうち少なくとも一方を生成する情報生成工程と、前記第1情報および前記第2情報のうち少なくとも一方を含む地図データを生成する地図データ生成工程と、を含むことを特徴とする、前記サーバにより実行される地図データ生成方法によって前記第2情報を含む地図データを生成し、
前記第2情報に対応する道路幅方向の位置における移動体の加速度または当該移動体の進行方向に基づいて、当該移動体の運転者の運転状態を評価することを特徴とする評価方法。
続きを表示(約 1,300 文字)
【請求項2】
前記地図データ生成方法の前記情報生成工程において、前記複数の移動体の道路幅方向の位置についてヒストグラムを生成し、極大値となる位置と、ばらつきの程度と、に基づいて前記第1情報および前記第2情報の少なくとも一方を生成する、請求項1に記載の評価方法。
【請求項3】
サーバにより実行される運転支援方法であって、
測定移動体に搭載された測定部によって測定された周辺情報と、予め記憶された道路情報と、を比較することにより、前記道路情報に対する、前記周辺情報に含まれる移動体の道路幅方向の位置を算出する算出工程と、前記道路情報に対する複数の移動体の道路幅方向の位置の分布に基づき、分布密度が所定値以上の範囲を示す第1情報と、前記第1情報の範囲の外側範囲を示す第2情報と、のうち少なくとも一方を生成する情報生成工程と、前記第1情報および前記第2情報のうち少なくとも一方を含む地図データを生成する地図データ生成工程と、を含むことを特徴とする、前記サーバにより実行される地図データ生成方法によって前記第2情報を含む地図データを生成し、
前記第2情報に対応する道路幅方向の位置における他移動体の挙動に基づき、当該他移動体が車線変更するのか否かを予測し、当該他移動体が車線変更することが予測される場合に、移動体に対して運転支援のための情報を出力することを特徴とする運転支援方法。
【請求項4】
前記地図データ生成方法の前記情報生成工程において、前記複数の移動体の道路幅方向の位置についてヒストグラムを生成し、極大値となる位置と、ばらつきの程度と、に基づいて前記第1情報および前記第2情報の少なくとも一方を生成する、請求項3に記載の運転支援方法。
【請求項5】
サーバにより実行される評価方法であって、
複数の移動体の道路幅方向の位置の分布に基づいた分布密度が所定値以下の範囲において、前記範囲に対応する道路幅方向の位置における移動体の加速度または当該移動体の進行方向に基づいて、当該移動体の運転者の運転状態を評価することを特徴とする評価方法。
【請求項6】
前記複数の移動体の道路幅方向の位置は、測定移動体に搭載された測定部によって測定された周辺情報と、予め記憶された道路情報と、を比較することにより算出される、請求項5に記載の評価方法。
【請求項7】
サーバにより実行される運転支援方法であって、
複数の移動体の道路幅方向の位置の分布に基づいた分布密度が所定値以下の範囲において、前記範囲に対応する道路幅方向の位置における他移動体の挙動に基づき、当該他移動体が車線変更するのか否かを予測し、当該他移動体が車線変更することが予測される場合に、移動体に対して運転支援のための情報を出力することを特徴とする運転支援方法。
【請求項8】
前記複数の移動体の道路幅方向の位置は、測定移動体に搭載された測定部によって測定された周辺情報と、予め記憶された道路情報と、を比較することにより算出される、請求項5に記載の運転支援方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、地図データ生成方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、搭乗者に多くの情報を提供することを目的として、車両が走行する車線および隣接する車線を検出する車線検出手段と、車両の搭乗者に情報を提示可能な情報提示手段と、を備えた情報処理装置が提案されている(例えば、特許文献1参照)。特許文献1に記載された情報処理装置では、走行する車線と隣接する車線との位置関係を示す情報を搭乗者に提示することにより、車線の検出が適切になされていることを搭乗者が知ることができるようになっている。
【先行技術文献】
【特許文献】
【0003】
特開2016-177622号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されたように車線を検出するだけでは、運転支援等を実施するための情報として不充分である場合があった。例えば、車線および他の移動体を検出する場合に、隣接する車線内において他の移動体がふらつきつつ走行していても、車線からはみ出していなければこの移動体が正常であると判断されてしまう可能性がある。また、幅員やレーン数等の情報だけでは、実際の道路事情に即して走行を支援する上で課題が存在した。
【0005】
したがって、本発明の課題は、詳細な情報を含む地図データを生成することができる地図データ生成方法を提供することが一例として挙げられる。
【課題を解決するための手段】
【0006】
前述した課題を解決し目的を達成するために、請求項1に記載の本発明の地図データ生成方法は、測定移動体に搭載された測定部によって測定された周辺情報と、予め記憶された道路情報と、を比較することにより、前記道路情報に対する、前記周辺情報に含まれる移動体の道路幅方向の位置を算出する算出工程と、前記道路情報に対する複数の移動体の道路幅方向の位置の分布に基づき、分布密度が所定値以上の範囲を示す第1情報と、前記第1情報の範囲の外側範囲を示す第2情報と、のうち少なくとも一方を生成する情報生成工程と、前記第1情報および前記第2情報のうち少なくとも一方を含む地図データを生成する地図データ生成工程と、を含むことを特徴としている。
【図面の簡単な説明】
【0007】
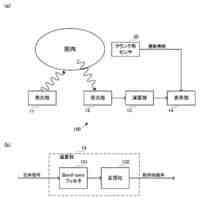
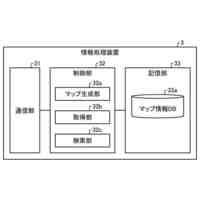
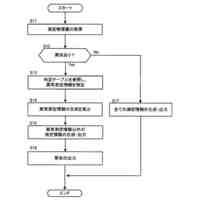
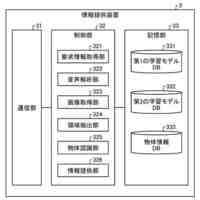
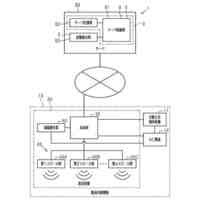
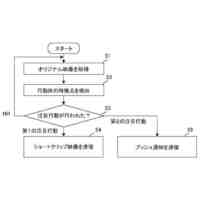
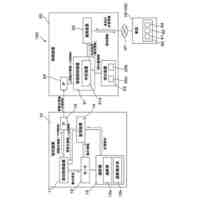
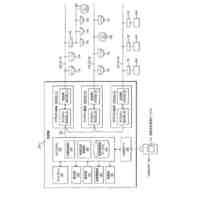
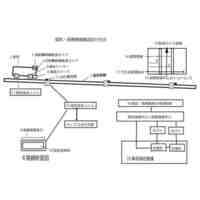
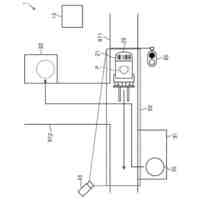
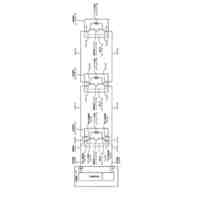
本発明の第1実施例の地図データ生成システムの概略を示すブロック図である。
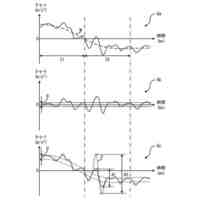
前記地図データ生成システムが生成するヒストグラムの一例である。
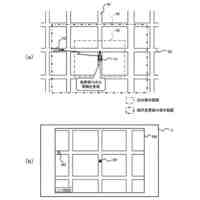
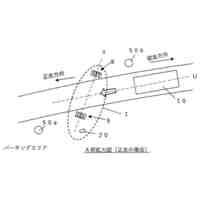
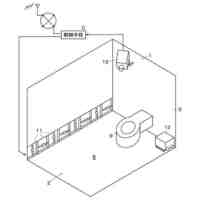
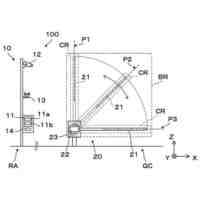
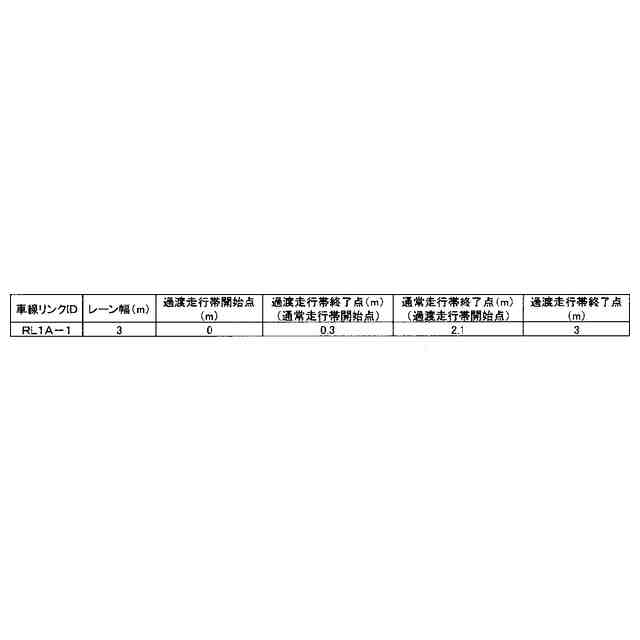
前記地図データ生成システムが生成する地図データに含まれる通常走行帯情報及び過渡走行帯情報を示す概略図である。
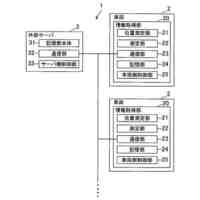
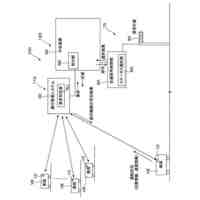
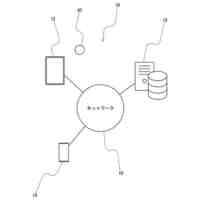
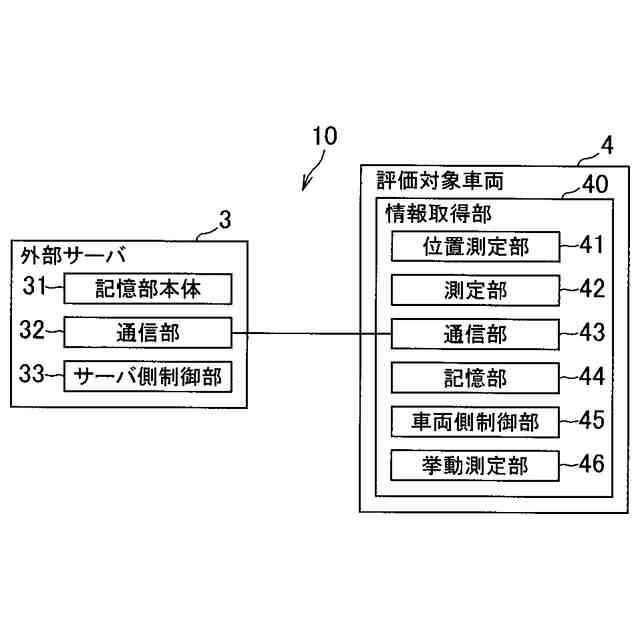
前記第1実施例の評価システムの概略を示すブロック図である。
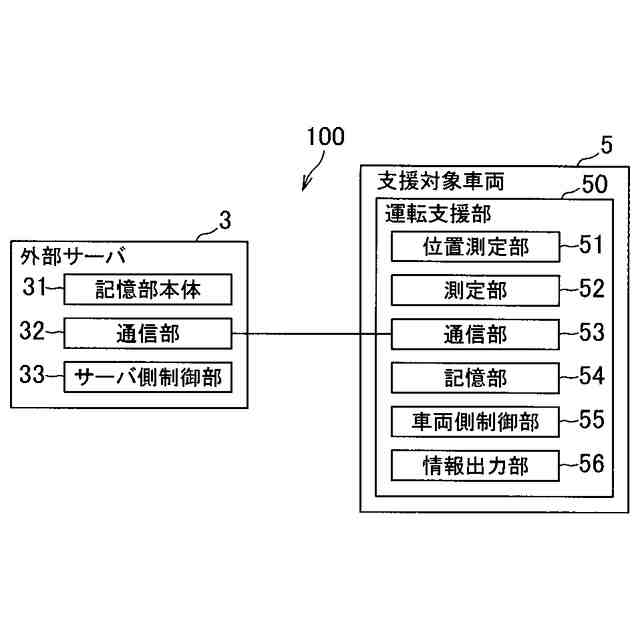
前記第2実施例の運転支援システムの概略を示すブロック図である。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態を説明する。本発明の実施形態に係る地図データ生成方法は、測定移動体に搭載された測定部によって測定された周辺情報と、予め記憶された道路情報と、を比較することにより、道路情報に対する、周辺情報に含まれる移動体の道路幅方向の位置を算出する算出工程と、道路情報に対する複数の移動体の道路幅方向の位置の分布に基づき、分布密度が所定値以上の範囲を示す第1情報と、第1情報の範囲の外側範囲を示す第2情報と、のうち少なくとも一方を生成する情報生成工程と、第1情報および第2情報のうち少なくとも一方を含む地図データを生成する地図データ生成工程と、を含む。
【0009】
複数の移動体の道路幅方向の位置の分布に基づいて第1情報と第2情報とを生成することから、第1情報に対応する道路幅方向位置は移動体の走行頻度が高く、第2情報に対応する道路幅方向位置は移動体の走行頻度が低い。即ち、単に移動体が走行可能か否かを示すレーン幅情報よりも詳細な情報を地図データに含めることができる。
【0010】
第1情報と第2情報とを地図データに含めることで、以下に複数例示するように地図データを利用することができる。まず、通常の幅員情報には歩道や中央分離帯も含まれることがあり、実際に走行可能な領域が不明であるのに対し、複数の移動体の道路幅方向の位置の分布に基づいて第1情報と第2情報とを生成することにより、実際に走行可能な領域を把握することができ、移動体を実際に走行可能な領域に案内することができる。特に、自動運転においては移動体を適切に案内することができる。また、手動運転では道路事情等に応じた運転が行われ、必ずしも各レーンの幅方向中央部を走行するとは限らないことから、複数の移動体の道路幅方向の位置の分布に基づく第1情報および第2情報を利用して案内することにより、自動運転においても実際の道路事情に即した運転を実現しやすい。また、第1情報および第2情報に基づいて他の移動体や移動物体の挙動を予測し、予測結果に基づいて運転支援を行うことができる。また、第1情報および第2情報に基づいて運転者の意図や運転行動を解析することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
パイオニア株式会社
保持装置
3日前
パイオニア株式会社
生体センサ
8日前
パイオニア株式会社
情報処理装置
3日前
パイオニア株式会社
地図データ生成装置
1日前
パイオニア株式会社
地図データ生成方法
3日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
8日前
パイオニア株式会社
情報提供装置、情報提供方法及び情報提供用プログラム
3日前
パイオニア株式会社
表示制御装置、表示制御方法、及び表示制御プログラム
8日前
パイオニア株式会社
自律走行制御装置、自律走行制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報提供装置、情報提供方法、情報提供プログラム及び記憶媒体
8日前
日本精機株式会社
路面投影装置
16日前
ニッタン株式会社
発信機
22日前
ニッタン株式会社
発信機
11日前
ニッタン株式会社
発信機
2か月前
個人
防犯に特化したアプリケーション
24日前
ニッタン株式会社
発信機
2か月前
個人
逆走・正走車両検出システム
2か月前
東京都公立大学法人
液滴検出装置
24日前
TOA株式会社
拡声放送システム
15日前
個人
乗り物の移動を支援する方法及び装置
2日前
株式会社JVCケンウッド
警報装置
10日前
株式会社アジラ
データ転送システム
15日前
日本信号株式会社
情報提供システム
2か月前
アズビル株式会社
建物管理システム
1か月前
日本信号株式会社
情報提供システム
9日前
日本信号株式会社
信号情報システム
9日前
ホーチキ株式会社
異常報知設備
1か月前
ホーチキ株式会社
異常報知設備
2か月前
個人
磁気・光学誘導路線による車両の運行制御
2か月前
株式会社JVCケンウッド
情報処理装置
1か月前
トヨタ自動車株式会社
回避動作判別装置
9日前
日本信号株式会社
交通信号制御システム
9日前
株式会社豊田自動織機
制御システム
15日前
ホーチキ株式会社
火災検出システム
10日前
株式会社フィットネスワン
見守りシステム
2か月前
ホーチキ株式会社
非常通報システム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ