TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025106591
公報種別
公開特許公報(A)
公開日
2025-07-15
出願番号
2025069710,2023171847
出願日
2025-04-21,2018-08-29
発明の名称
自律走行制御装置、自律走行制御方法、プログラム及び記憶媒体
出願人
パイオニア株式会社
代理人
個人
主分類
G01C
21/34 20060101AFI20250708BHJP(測定;試験)
要約
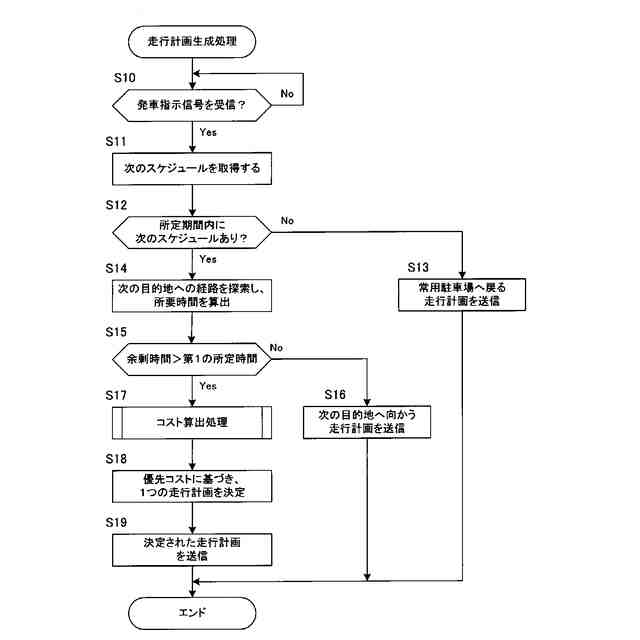
【課題】次のスケジュールを踏まえて、利用者が降車した後の自動運転車の走行計画を自動的に決定可能とする。
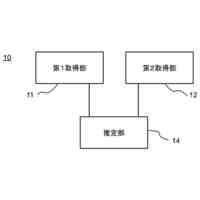
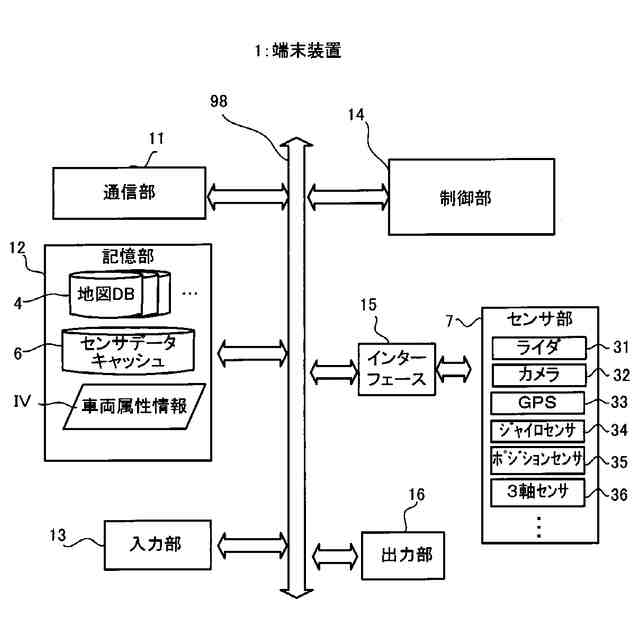
【解決手段】自律走行制御装置は、自律走行可能な車両に搭載され、該車両の自律走行を制御する。自律走行制御装置は、車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを取得する。次に、自律走行制御装置は、取得された複数のスケジュールに基づいて、第1スケジュールが示す第1目的地を出発し、第2スケジュールが示す第2目的地に到着するための複数の走行計画を取得する。そして、自律走行制御装置は、取得された複数の走行計画のうちから所定の基準に基づいて選択した1の走行計画に応じて、前記車両の自律走行を制御する。
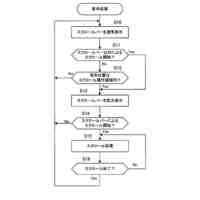
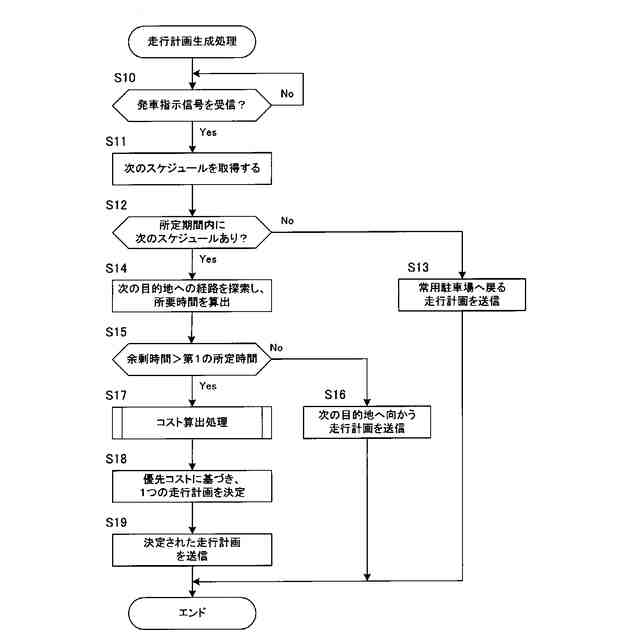
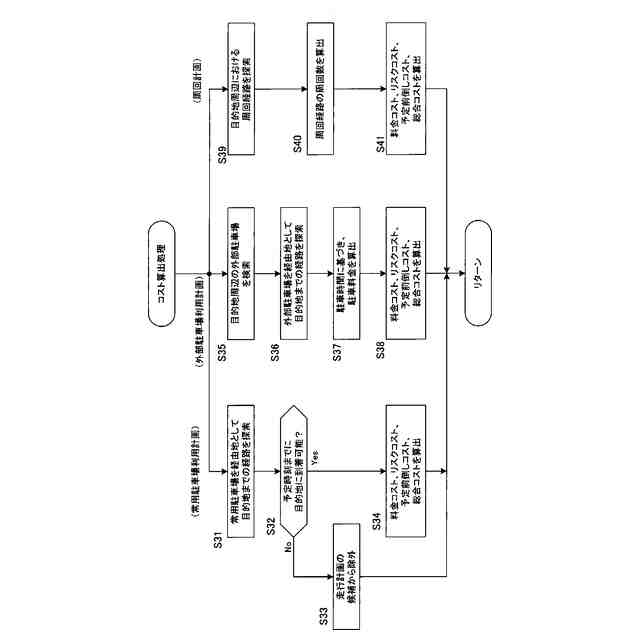
【選択図】図6
特許請求の範囲
【請求項1】
自律走行可能な車両に搭載され、該車両の自律走行を制御する自律走行制御装置であって、
前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを取得するスケジュール取得手段と、
前記車両の利用者からの発車指示を取得する発車指示取得手段と、
前記スケジュール取得手段により取得されたスケジュールのうち、前記発車指示取得手段が発車指示を取得した後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を取得する走行計画取得手段と、
前記走行計画取得手段により取得された走行計画に応じて、前記発車指示取得手段が発車指示を取得した後の前記車両の自律走行を制御する制御手段と、
を備え、
前記走行計画取得手段は、前記次スケジュールの予定時刻が早まった場合に、前記車両が前記次スケジュールが示す目的地に迅速に到着できるかを示す指標に基づいて選択された経路を走行する走行計画を取得することを特徴とする自律走行制御装置。
続きを表示(約 3,700 文字)
【請求項2】
前記走行計画取得手段は、前記指標として、前記車両の所定時間毎の予定位置から前記次スケジュールが示す目的地までの距離の平均値に基づいて算出された予定前倒しコストに基づいて選択された経路を走行する走行計画を取得することを特徴とする請求項1に記載の自律走行制御装置。
【請求項3】
前記走行計画取得手段は、所定期間内に実行すべき前記次スケジュールが存在する場合において、前記次スケジュールの予定時刻が早まった場合に、前記車両が前記次スケジュールが示す目的地に迅速に到着できるかを示す指標に基づいて選択された経路を走行する走行計画を取得し、前記所定期間内に実行すべき前記次スケジュールが存在しない場合に、前記車両が常時駐車可能な複数の常用駐車場所のうち前記発車指示を取得した位置に最も近い常用駐車場所に向かう走行計画を取得することを特徴とする請求項1または2に記載の自律走行制御装置。
【請求項4】
自律走行可能な車両に搭載され、該車両の自律走行を制御する自律走行制御装置であって、
前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを取得するスケジュール取得手段と、
前記車両の利用者からの発車指示を取得する発車指示取得手段と、
前記スケジュール取得手段により取得されたスケジュールのうち、前記発車指示取得手段が発車指示を取得した後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を取得する走行計画取得手段と、
前記走行計画に応じて、前記発車指示取得手段が発車指示を取得した後の前記車両の自律走行を制御する制御手段と、
を備え、
前記走行計画取得手段は、所定期間内に実行すべき前記次スケジュールが存在しない場合に、前記車両が常時駐車可能な複数の常用駐車場所のうち前記発車指示を取得した位置に最も近い常用駐車場所に向かう走行計画を取得することを特徴とする自律走行制御装置。
【請求項5】
自律走行可能な車両に搭載される自律走行制御装置と通信するサーバ装置であって、
前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを記憶する記憶手段と、
前記車両の利用者が発車指示を行ったことを示す発車指示情報を受信する受信手段と、
前記記憶手段に記憶されたスケジュールのうち、前記発車指示情報が受信された後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を生成する走行計画生成手段と、
前記走行計画生成手段により生成された走行計画を前記自律走行制御装置に送信する送信手段と、
を備え、
前記走行計画生成手段は、前記次スケジュールの予定時刻が早まった場合に、前記車両が前記次スケジュールが示す目的地に迅速に到着できるかを示す指標に基づいて経路を選択し、当該経路を走行する走行計画を生成することを特徴とするサーバ装置。
【請求項6】
自律走行可能な車両に搭載される自律走行制御装置と通信するサーバ装置であって、
前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを記憶する記憶手段と、
前記車両の利用者が発車指示を行ったことを示す発車指示情報を受信する受信手段と、
前記記憶手段に記憶されたスケジュールのうち、前記発車指示情報が受信された後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を生成する走行計画生成手段と、
前記走行計画生成手段により生成された走行計画を前記自律走行制御装置に送信する送信手段と、
を備え、
前記走行計画生成手段は、所定期間内に実行すべき前記次スケジュールが存在しない場合に、前記車両が常時駐車可能な複数の常用駐車場所のうち前記発車指示が行なわれた位置に最も近い常用駐車場所に向かう走行計画を生成することを特徴とするサーバ装置。
【請求項7】
自律走行可能な車両に搭載され、該車両の自律走行を制御する自律走行制御装置によって実行される自律走行制御方法であって、
前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを取得するスケジュール取得工程と、
前記車両の利用者からの発車指示を取得する発車指示取得工程と、
前記スケジュール取得工程により取得されたスケジュールのうち、前記発車指示取得工程が発車指示を取得した後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を取得する走行計画取得工程と、
前記走行計画取得工程により取得された走行計画に応じて、前記発車指示取得工程が発車指示を取得した後の前記車両の自律走行を制御する制御工程と、
を備え、
前記走行計画取得工程は、前記次スケジュールの予定時刻が早まった場合に、前記車両が前記次スケジュールが示す目的地に迅速に到着できるかを示す指標に基づいて選択された経路を走行する走行計画を取得することを特徴とする自律走行制御方法。
【請求項8】
自律走行可能な車両に搭載され、コンピュータを備え、該車両の自律走行を制御する自律走行制御装置によって実行されるプログラムであって、
前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを取得するスケジュール取得手段、
前記車両の利用者からの発車指示を取得する発車指示取得手段、
前記スケジュール取得手段により取得されたスケジュールのうち、前記発車指示取得手段が発車指示を取得した後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を取得する走行計画取得手段、
前記走行計画取得手段により取得された走行計画に応じて、前記発車指示取得手段が発車指示を取得した後の前記車両の自律走行を制御する制御手段、
として前記コンピュータを機能させ、
前記走行計画取得手段は、前記次スケジュールの予定時刻が早まった場合に、前記車両が前記次スケジュールが示す目的地に迅速に到着できるかを示す指標に基づいて選択された経路を走行する走行計画を取得することを特徴とするプログラム。
【請求項9】
自律走行可能な車両に搭載され、該車両の自律走行を制御する自律走行制御装置によって実行される自律走行制御方法であって、
前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを取得するスケジュール取得工程と、
前記車両の利用者からの発車指示を取得する発車指示取得工程と、
前記スケジュール取得工程により取得されたスケジュールのうち、前記発車指示取得工程が発車指示を取得した後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を取得する走行計画取得工程と、
前記走行計画に応じて、前記発車指示取得工程が発車指示を取得した後の前記車両の自律走行を制御する制御工程と、
を備え、
前記走行計画取得工程は、所定期間内に実行すべき前記次スケジュールが存在しない場合に、前記車両が常時駐車可能な複数の常用駐車場所のうち前記発車指示を取得した位置に最も近い常用駐車場所に向かう走行計画を取得することを特徴とする自律走行制御方法。
【請求項10】
自律走行可能な車両に搭載され、コンピュータを備え、該車両の自律走行を制御する自律走行制御装置によって実行されるプログラムであって、
前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを取得するスケジュール取得手段、
前記車両の利用者からの発車指示を取得する発車指示取得手段、
前記スケジュール取得手段により取得されたスケジュールのうち、前記発車指示取得手段が発車指示を取得した後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を取得する走行計画取得手段、
前記走行計画に応じて、前記発車指示取得手段が発車指示を取得した後の前記車両の自律走行を制御する制御手段、
として前記コンピュータを機能させ、
前記走行計画取得手段は、所定期間内に実行すべき前記次スケジュールが存在しない場合に、前記車両が常時駐車可能な複数の常用駐車場所のうち前記発車指示を取得した位置に最も近い常用駐車場所に向かう走行計画を取得することを特徴とするプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転車の制御に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
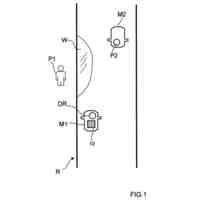
利用者が降車した後の自動運転車の振る舞いを設定する手法が特許文献1に記載されている。具体的に特許文献1では、利用者は、自動運転車を降車した後の振る舞いとして、予め設定された既定の駐車場へ移動する、近隣の駐車場で呼ぶまで待機する、所定時間後に降車位置へ戻る、所定時間後に指定地点で待つ、などを設定することができる。
【先行技術文献】
【特許文献】
【0003】
特許6320496号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記の手法では、利用者は自動運転車を降車する度に、その後の振る舞いを設定する必要があり、煩雑である。
【0005】
本発明は、上記のような課題を解決するためになされたものであり、次のスケジュールを踏まえて、利用者が降車した後の自動運転車の走行計画を自動的に決定可能とすることを目的とする。
【課題を解決するための手段】
【0006】
請求項に記載の発明は、自律走行可能な車両に搭載され、該車両の自律走行を制御する自律走行制御装置であって、前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを取得するスケジュール取得手段と、前記車両の利用者からの発車指示を取得する発車指示取得手段と、前記スケジュール取得手段により取得されたスケジュールのうち、前記発車指示取得手段が発車指示を取得した後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を取得する走行計画取得手段と、前記走行計画取得手段により取得された走行計画に応じて、前記発車指示取得手段が発車指示を取得した後の前記車両の自律走行を制御する制御手段と、を備え、前記走行計画取得手段は、前記次スケジュールの予定時刻が早まった場合に、前記車両が前記次スケジュールが示す目的地に迅速に到着できるかを示す指標に基づいて選択された経路を走行する走行計画を取得することを特徴とする。
【0007】
請求項に記載の発明は、自律走行可能な車両に搭載され、該車両の自律走行を制御する自律走行制御装置であって、前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを取得するスケジュール取得手段と、前記車両の利用者からの発車指示を取得する発車指示取得手段と、前記スケジュール取得手段により取得されたスケジュールのうち、前記発車指示取得手段が発車指示を取得した後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を取得する走行計画取得手段と、前記走行計画に応じて、前記発車指示取得手段が発車指示を取得した後の前記車両の自律走行を制御する制御手段と、を備え、前記走行計画取得手段は、所定期間内に実行すべき前記次スケジュールが存在しない場合に、前記車両が常時駐車可能な複数の常用駐車場所のうち前記発車指示を取得した位置に最も近い常用駐車場所に向かう走行計画を取得することを特徴とする。
【0008】
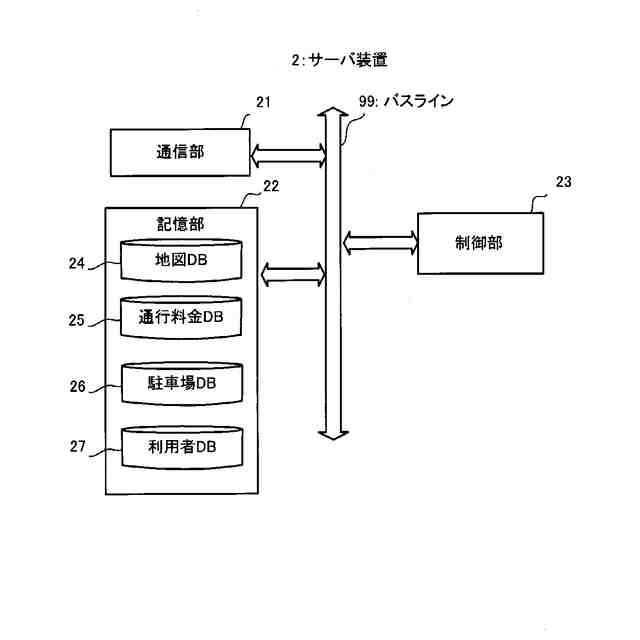
請求項に記載の発明は、自律走行可能な車両に搭載される自律走行制御装置と通信するサーバ装置であって、前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを記憶する記憶手段と、前記車両の利用者が発車指示を行ったことを示す発車指示情報を受信する受信手段と、前記記憶手段に記憶されたスケジュールのうち、前記発車指示情報が受信された後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を生成する走行計画生成手段と、前記走行計画生成手段により生成された走行計画を前記自律走行制御装置に送信する送信手段と、を備え、前記走行計画生成手段は、前記次スケジュールの予定時刻が早まった場合に、前記車両が前記次スケジュールが示す目的地に迅速に到着できるかを示す指標に基づいて経路を選択し、当該経路を走行する走行計画を生成することを特徴とする。
【0009】
請求項に記載の発明は、自律走行可能な車両に搭載される自律走行制御装置と通信するサーバ装置であって、前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを記憶する記憶手段と、前記車両の利用者が発車指示を行ったことを示す発車指示情報を受信する受信手段と、前記記憶手段に記憶されたスケジュールのうち、前記発車指示情報が受信された後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を生成する走行計画生成手段と、前記走行計画生成手段により生成された走行計画を前記自律走行制御装置に送信する送信手段と、を備え、前記走行計画生成手段は、所定期間内に実行すべき前記次スケジュールが存在しない場合に、前記車両が常時駐車可能な複数の常用駐車場所のうち前記発車指示が行なわれた位置に最も近い常用駐車場所に向かう走行計画を生成することを特徴とする。
【0010】
請求項に記載の発明は、自律走行可能な車両に搭載され、該車両の自律走行を制御する自律走行制御装置によって実行される自律走行制御方法であって、前記車両が到着すべき目的地および当該目的地に到着すべき予定時刻を示すスケジュールを取得するスケジュール取得工程と、前記車両の利用者からの発車指示を取得する発車指示取得工程と、前記スケジュール取得工程により取得されたスケジュールのうち、前記発車指示取得工程が発車指示を取得した後に予定されている次スケジュールが示す目的地に、当該次スケジュールが示す予定時刻までに到着するための走行計画を取得する走行計画取得工程と、前記走行計画取得工程により取得された走行計画に応じて、前記発車指示取得工程が発車指示を取得した後の前記車両の自律走行を制御する制御工程と、を備え、前記走行計画取得工程は、前記次スケジュールの予定時刻が早まった場合に、前記車両が前記次スケジュールが示す目的地に迅速に到着できるかを示す指標に基づいて選択された経路を走行する走行計画を取得することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
パイオニア株式会社
制御装置
7日前
パイオニア株式会社
探索装置
7日前
パイオニア株式会社
情報処理装置
1日前
パイオニア株式会社
情報処理装置
7日前
パイオニア株式会社
情報処理装置
15日前
パイオニア株式会社
運転指標出力装置
7日前
パイオニア株式会社
表示装置、表示方法及びプログラム
7日前
パイオニア株式会社
経路案内装置、制御方法、プログラム及び記憶媒体
7日前
パイオニア株式会社
移動体装置、情報処理方法及び情報処理用プログラム
7日前
パイオニア株式会社
情報提供装置、情報提供方法及び情報提供用プログラム
7日前
パイオニア株式会社
推定装置、推定方法、コンピュータプログラム、及び記憶媒体
7日前
パイオニア株式会社
運転評価装置、運転評価方法、運転評価プログラム及び記録媒体
9日前
パイオニア株式会社
移動体装置、情報処理方法及び情報処理用プログラム並びに情報処理システム
7日前
ユニパルス株式会社
力変換器
6日前
三菱電機株式会社
計測器
今日
横浜ゴム株式会社
音響窓
8日前
株式会社豊田自動織機
産業車両
13日前
株式会社ミツトヨ
測定器
1か月前
日置電機株式会社
測定装置
7日前
株式会社国際電気
試験装置
20日前
個人
センサーを備えた装置
10日前
日本精機株式会社
施工管理システム
10日前
IPU株式会社
距離検出装置
6日前
株式会社東芝
センサ
9日前
株式会社田中設備
報知装置
14日前
株式会社CAST
センサ固定治具
13日前
WOTA株式会社
液位検出システム
20日前
株式会社熊平製作所
刃物類判別装置
13日前
アズビル株式会社
火炎状態判定装置
7日前
日本装置開発株式会社
X線検査装置
23日前
オムロン株式会社
スイッチング装置
20日前
タカノ株式会社
試料分析装置
1か月前
富士電機株式会社
半導体パッケージ
2日前
タカノ株式会社
試料分析装置
1か月前
本多電子株式会社
超音波ソナー装置
1日前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ