TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105189
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223557
出願日
2023-12-28
発明の名称
判定装置、判定方法および判定プログラム
出願人
パイオニア株式会社
代理人
個人
主分類
G08G
1/16 20060101AFI20250703BHJP(信号)
要約
【課題】精度高く動体検知を行う。
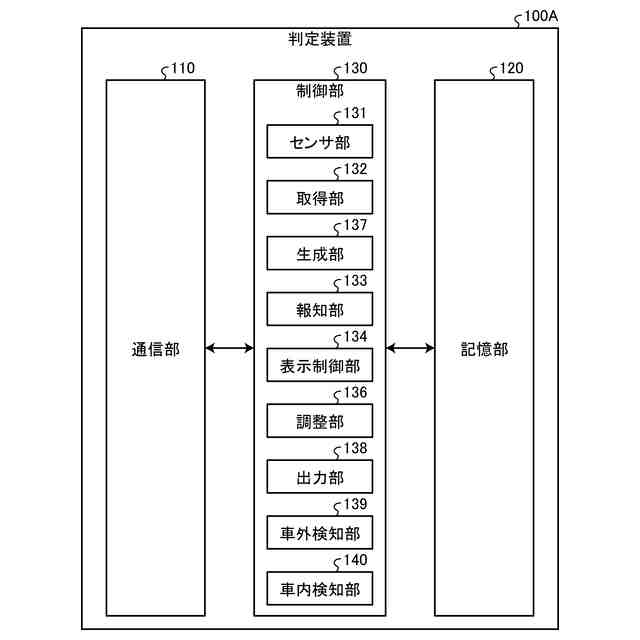
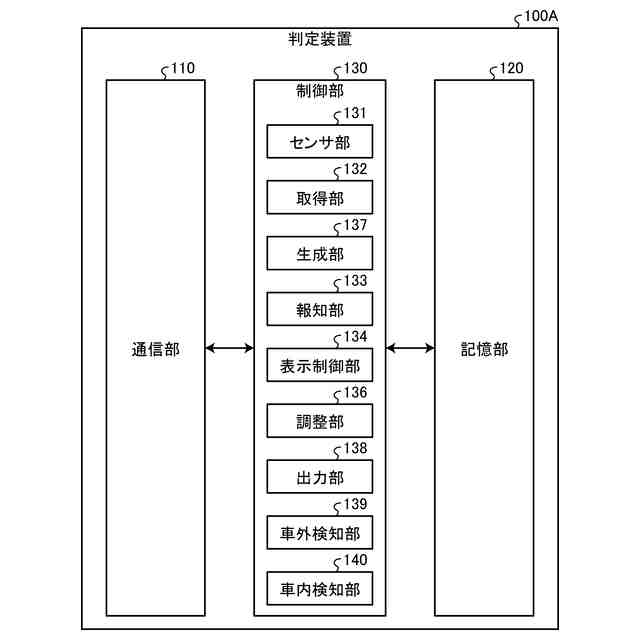
【解決手段】判定装置100Aは、車両に備えられた動体センサにより生成されたセンサデータを取得する取得部132と、ユーザが車両の周りを歩行している時に、取得部132により取得されたセンサデータに基づいて、車両位置に関する情報を生成する生成部137とを有することを特徴とする。
【選択図】図6
特許請求の範囲
【請求項1】
車両に備えられた動体センサにより生成されたセンサデータを取得する取得部と、
ユーザが前記車両の周りを歩行している時に、前記取得部により取得された前記センサデータに基づいて、車両位置に関する情報を生成する生成部と
を有することを特徴とする判定装置。
続きを表示(約 930 文字)
【請求項2】
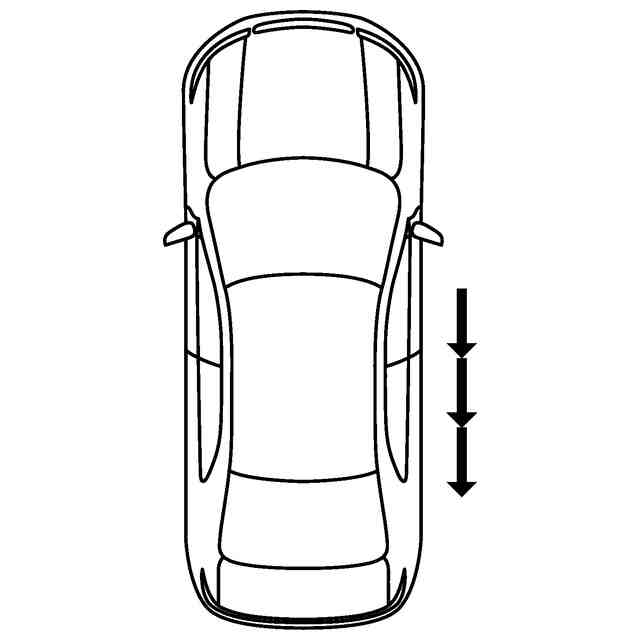
前記ユーザに前記車両の周りの歩行を促す情報を報知する報知部をさらに有することを特徴とする請求項1に記載の判定装置。
【請求項3】
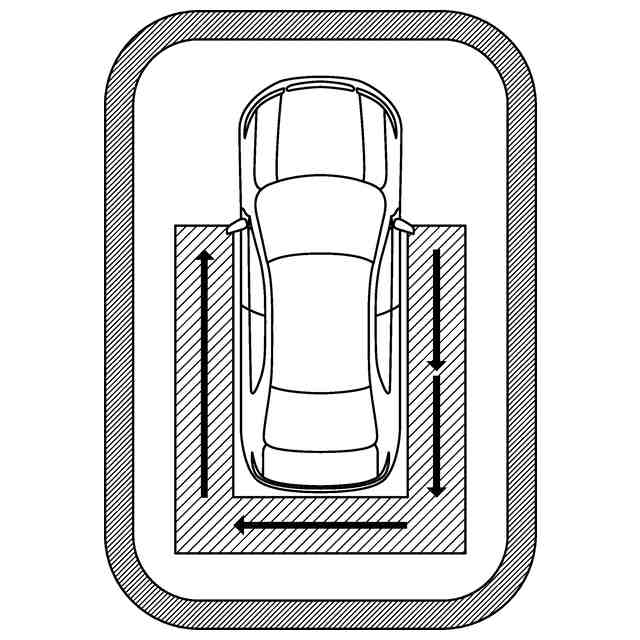
前記車両の周りの前記ユーザが歩行すべき位置を線で前記ユーザの端末に表示するように制御する表示制御部をさらに有することを特徴とする請求項1に記載の判定装置。
【請求項4】
前記表示制御部は、前記取得部で取得された前記センサデータに基づいて、動体が検知された位置を前記ユーザが歩行した位置として前記端末に表示するように制御することを特徴とする請求項3に記載の判定装置。
【請求項5】
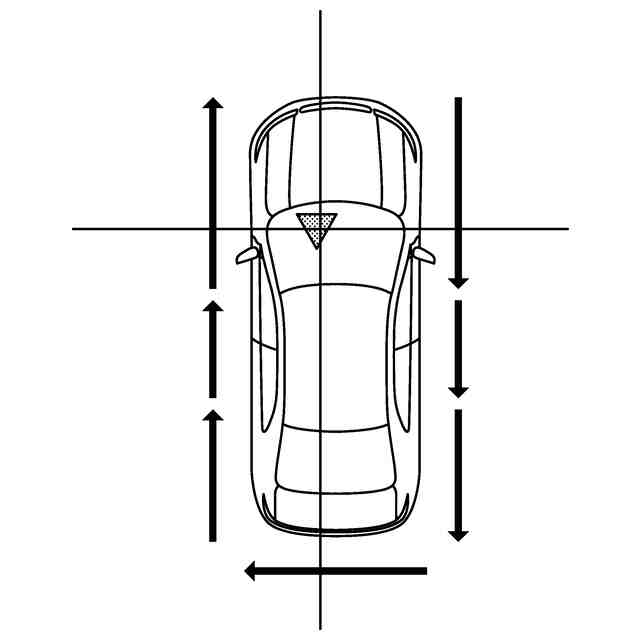
前記生成部は、前記車両位置に関する情報として、前記ユーザの歩行中において、前記取得部により取得された前記センサデータに基づいて、前記車両の全長、および、車両の全幅のうちいずれか一方または両方の情報を生成することを特徴とする請求項1に記載の判定装置。
【請求項6】
前記生成部は、前記車両位置に関する情報として、前記ユーザの歩行中において、前記取得部により取得された前記センサデータに基づいて、前記動体センサの取り付け位置の情報を生成することを特徴とする請求項1に記載の判定装置。
【請求項7】
前記生成部により生成された前記動体センサの取り付け位置に応じて、所定の通知を出力する出力部をさらに有することを特徴とする請求項6に記載の判定装置。
【請求項8】
前記生成部により生成された前記車両位置に関する情報に基づいて、前記動体センサの検知範囲および感度の少なくとも一つを調整する調整部をさらに有することを特徴とする請求項1に記載の判定装置。
【請求項9】
前記センサデータと前記車両位置に関する情報とに基づいて、車両外の動体を検知する車外検知部をさらに有することを特徴とする請求項1に記載の判定装置。
【請求項10】
前記センサデータと前記車両位置に関する情報とに基づいて、車両内の動体を検知する車内検知部をさらに有することを特徴とする請求項1に記載の判定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、判定装置、判定方法および判定プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、車両内にあるセンサを用いて、車両内の死角を検出し、車両内の死角を動体検知の妨げにならない位置に移動させ、車両周辺の動体検知をする技術が存在する。(例えば、特許技術文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2023-028943号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
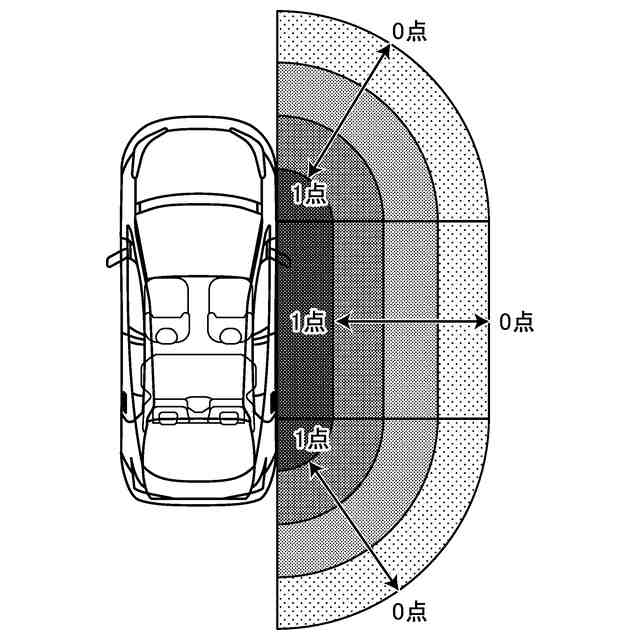
しかしながら従来技術では、精度高く動体検知を行うことができない場合があった。例えば、動体センサが備えられた車両のサイズまたは動体センサの車両への設置位置が車両周辺の動体検知の精度に影響することが考えられるが、実際に動体センサが備えられる車両のサイズまたは設置位置は均一でない。そのため、車両周辺の動体検知に際し、車両のサイズに応じて動体センサの設定を変更することが望まれている。このように、本発明が解決しようとする課題としては、上述した問題が一例として挙げられる。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するため、請求項1に記載の発明は、車両に備えられた動体センサにより生成されたセンサデータを取得する取得部と、ユーザが前記車両の周りを歩行している時に、前記取得部により取得された前記センサデータに基づいて、車両位置に関する情報を生成する生成部とを有することを特徴とする。
【0006】
請求項11に記載の発明は、判定装置が実行する判定方法であって、車両に備えられた動体センサにより生成されたセンサデータを取得する取得工程と、ユーザが前記車両の周りを歩行している時に 、前記取得工程により取得された前記センサデータに基づいて、車両位置に関する情報を生成する生成工程とを含むことを特徴とする。
【0007】
請求項12に記載の発明は、車両に備えられた動体センサにより生成されたセンサデータを取得する取得ステップと、ユーザが前記車両の周りを歩行している時に 、前記取得ステップにより取得された前記センサデータに基づいて、車両位置に関する情報を生成する生成ステップとをコンピュータに実行させることを特徴とする。
【図面の簡単な説明】
【0008】
図1は、第1の実施形態に係る判定装置の構成の一例を示す図である。
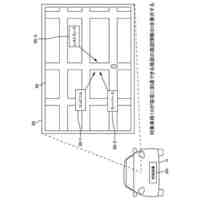
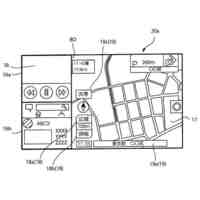
図2は、第1の実施形態に係る判定装置による表示制御処理の一例を示す図である。
図3は、第1の実施形態に係る判定装置による表示制御処理の一例を示す図である。
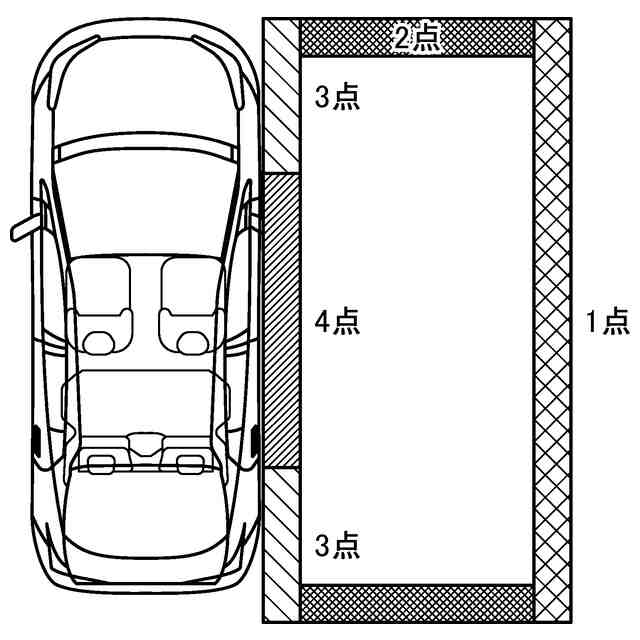
図4は、第1の実施形態に係る判定装置による検知処理の一例を示す図である。
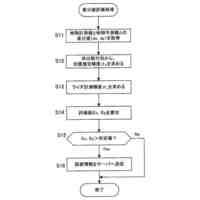
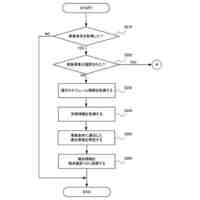
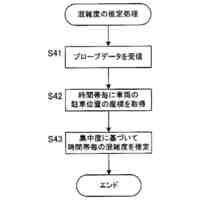
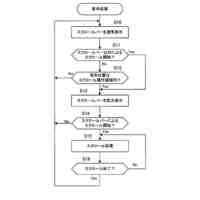
図5は、第1の実施形態に係る判定装置による処理の一例を示すフローチャートである。
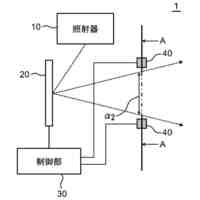
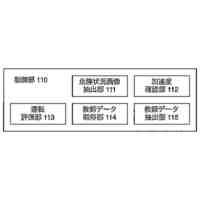
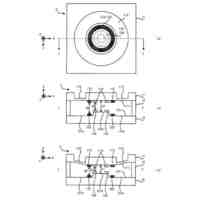
図6は、第2の実施形態に係る判定装置の構成の一例を示す図である。
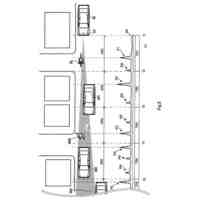
図7は、第2の実施形態に係る判定装置による生成処理の一例を示す図である。
図8は、第2の実施形態に係る判定装置による車外検知処理の一例を示す図である。
図9は、第2の実施形態に係る判定装置による車外検知処理の一例を示す図である。
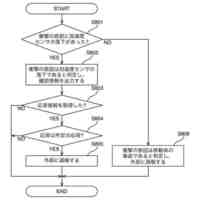
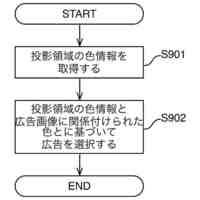
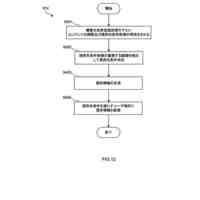
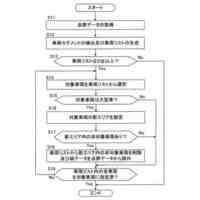
図10は、第2の実施形態に係る判定装置による処理の一例を示すフローチャートである。
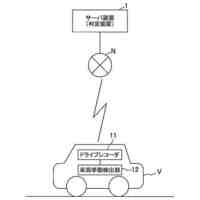
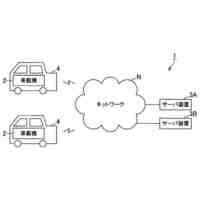
図11は、変形例の実施形態に係る判定装置システムの構成の一例を示す図である。
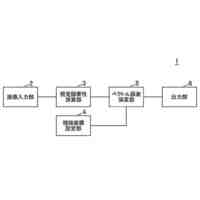
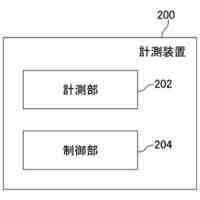
図12は、変形例の実施形態に係る判定装置の構成の一例を示す図である。
図13は、判定装置の機能を実現するコンピュータの一例を示すハードウェア構成図である。
【発明を実施するための形態】
【0009】
以下に、図面を参照しつつ、本発明を実施するための形態(以下、実施の形態)について説明する。なお、以下に説明する実施の形態によって本発明が限定されるものではない。さらに、図面の記載において、同一の部分には同一の符号を付している。
【0010】
[第1の実施形態]
〔1.判定装置の構成〕
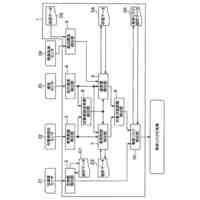
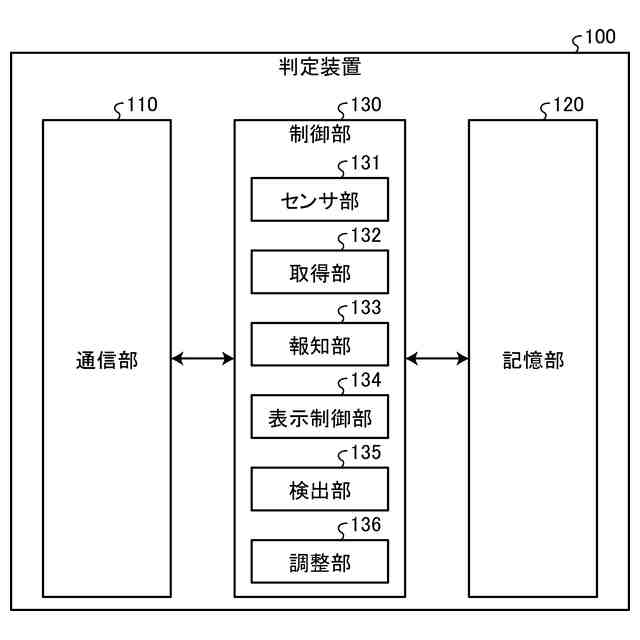
まず、図1を用いて、実施形態に係る判定装置100について説明する。図1は、実施形態に係る判定装置100の構成例を示す図である。図1に示すように、判定装置100は、通信部110と、記憶部120と、制御部130とを有する。以下、判定装置100が有する各部について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
制御装置
25日前
パイオニア株式会社
判定装置
10日前
パイオニア株式会社
制御装置
17日前
パイオニア株式会社
探索装置
25日前
パイオニア株式会社
測定装置
1か月前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
10日前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
10日前
パイオニア株式会社
情報表示装置
10日前
パイオニア株式会社
情報処理装置
19日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
10日前
パイオニア株式会社
情報処理装置
10日前
パイオニア株式会社
距離算出装置
6日前
パイオニア株式会社
情報処理装置
17日前
パイオニア株式会社
状況出力装置
4日前
パイオニア株式会社
情報処理装置
25日前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
アクチュエータ
17日前
パイオニア株式会社
ミラースキャナ
10日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
7日前
パイオニア株式会社
データ処理装置
10日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
7日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
7日前
パイオニア株式会社
運転指標出力装置
25日前
パイオニア株式会社
リスク情報出力装置
4日前
パイオニア株式会社
情報処理装置及び情報処理方法
4日前
パイオニア株式会社
調整方法、検出機器及び検出装置
17日前
パイオニア株式会社
表示装置、表示方法及びプログラム
25日前
パイオニア株式会社
走査方法の決定方法、および計測方法
10日前
パイオニア株式会社
情報処理装置、方法、プログラム及び記憶媒体
17日前
パイオニア株式会社
表示装置、制御方法、プログラム及び記憶媒体
6日前
パイオニア株式会社
出力装置、制御方法、プログラム及び記憶媒体
6日前
パイオニア株式会社
表示制御装置、制御方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
17日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
経路案内装置、制御方法、プログラム及び記憶媒体
25日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ