TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025081667
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2025029028,2023199701
出願日
2025-02-26,2019-07-16
発明の名称
測距装置
出願人
パイオニア株式会社
代理人
弁理士法人レクスト国際特許事務所
主分類
G01S
17/36 20060101AFI20250520BHJP(測定;試験)
要約
【課題】複数の受光素子についての測距を高精度に行うことが可能な測距装置を提供する。
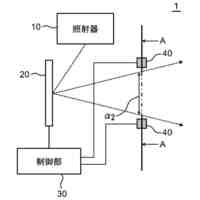
【解決手段】出射光を出射する出射部11と、出射光の光路上に設けられた可動ミラーと、出射光が外部の物体により反射された戻り光が、可動ミラーの動きに応じて順次照射されるように配列された複数の受光素子21Aと、受光素子の受光結果に基づいて、外部の物体までの距離を算出する測距部と、複数の受光素子のうちの少なくとも一の受光素子が戻り光を受光した場合に、戻り光が照射される順序が少なくとも一の受光素子よりも後である他の受光素子の出力信号を測距部が受信可能な状態にする制御部と、を有することを特徴とする。
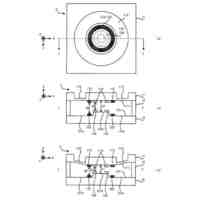
【選択図】図2
特許請求の範囲
【請求項1】
出射光を出射する出射部と、
前記出射光の光路上に設けられた可動ミラーと、
前記出射光が外部の物体により反射された戻り光が、前記可動ミラーの動きに応じて順次照射されるように配列された複数の受光素子と、
前記受光素子の受光結果に基づいて、前記外部の物体までの距離を算出する測距部と、
前記複数の受光素子のうちの少なくとも一の受光素子が前記戻り光を受光した場合に、前記戻り光が照射される順序が前記少なくとも一の受光素子よりも後である他の受光素子の出力信号を前記測距部が受信可能な状態にする制御部と、
を有することを特徴とする測距装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、測距装置に関し、特に、送信信号及び受信信号の位相を比較して対象物までの距離を測定する測距装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
レーザ光を対象物に照射し、当該対象物によって反射されたレーザ光を受光して解析することにより、対象物までの距離を計測する測距装置が知られている(例えば、特許文献1)。かかる測距装置の測距方式としては、TOF(Time of Flight)方式や位相差法方式がある。TOF方式では、送信した信号が対象物に反射して戻ってくるまでの時間を計測し、計測した時間に基づいて距離を測定する。
【0003】
一方、位相差法では、例えば正弦波によって光強度を変調したレーザ光を対象物に照射し、対象物によって反射されたレーザ光である反射光を受光して、その光強度を電気信号に変換する。そして、電気信号に含まれる正弦波の成分と射出時のレーザ光の光強度に含まれる正弦波の成分との位相差を抽出し、抽出した位相差を遅延時間に変換し、当該遅延時間及び光速度に基づいて対象物との距離を算出する。
【先行技術文献】
【特許文献】
【0004】
特開2015-129646号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のような測距をレーザ光の照射面上の複数の位置(以下、複数の画素領域と称する)について行う場合、測距装置にはこれに対応する複数の受光部が必要となる。例えば、レーザ光を対象物に向けて照射する際、光源から出射されたレーザ光を2次元方向に走査するようにして投光を行う。複数の受光部は、それぞれ反射光を受光し、受光信号に基づいて画素領域毎に距離を算出する。
【0006】
位相差法による測距では、外部から入射した光を所定期間(例えば、2次元画面の1フレーム分の走査に対応する受光期間)の間連続して受光素子に受光させる必要がある。しかし、複数の受光部を用いて画素領域毎に距離の算出を行う場合、当該所定期間の内、各々の画素領域に対応する受光部に実際に反射光が入射する時間は極めて短く、それ以外のほとんどの期間では背景光のみを受光してしまう。背景光は、反射光の受光にとってノイズ成分となり、信号のS/N比を悪化させる。そして、背景光に基づく受光信号を受光後の位相復調動作に用いると、背景光によるノイズ成分が復調位相に外乱として混入し、距離計測結果の精度を悪化させるという問題点があった。
【0007】
このように、複数の画素領域について測距を行う場合、背景光の受光により測定精度が悪化してしまうということが課題の一例として挙げられる。
【0008】
本発明は上記した点に鑑みてなされたものであり、複数の画素領域についての測距を高精度に行うことが可能な測距装置を提供することを目的の一つとしている。
【課題を解決するための手段】
【0009】
請求項1に記載の発明は、出射光を出射する出射部と、前記出射光の光路上に設けられた可動ミラーと、前記出射光が外部の物体により反射された戻り光が、前記可動ミラーの動きに応じて順次照射されるように配列された複数の受光素子と、前記受光素子の受光結果に基づいて、前記外部の物体までの距離を算出する測距部と、前記複数の受光素子のうちの少なくとも一の受光素子が前記戻り光を受光した場合に、前記戻り光が照射される順序が前記少なくとも一の受光素子よりも後である他の受光素子の出力信号を前記測距部が受信可能な状態にする制御部と、を有することを特徴とする。
【図面の簡単な説明】
【0010】
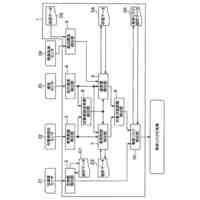
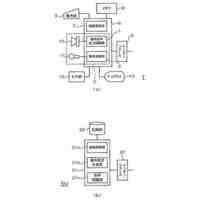
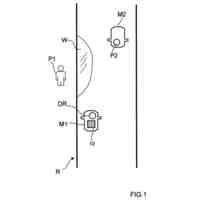
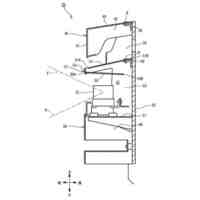
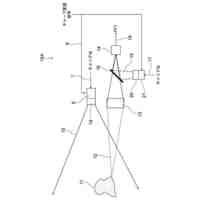
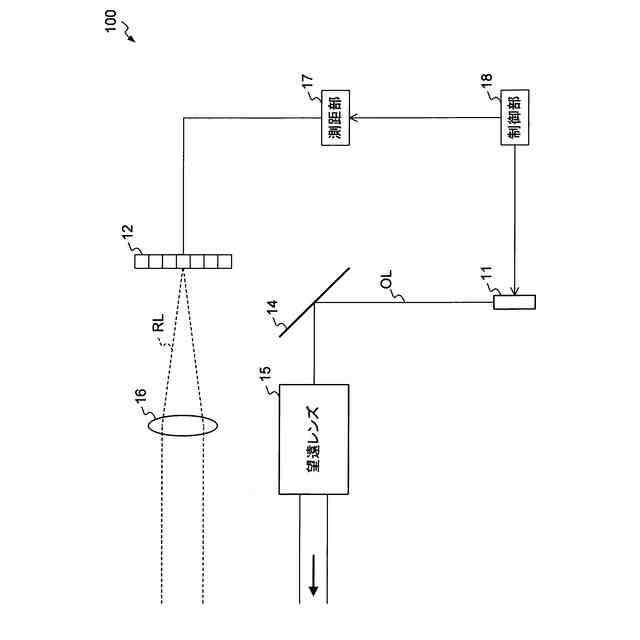
本実施例の測距装置の概略構成を示すブロック図である。
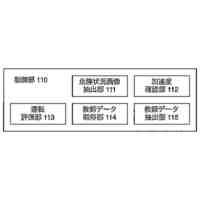
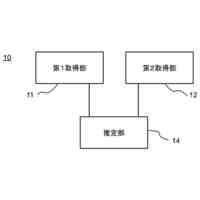
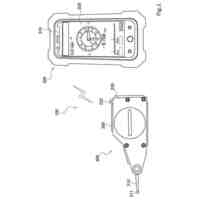
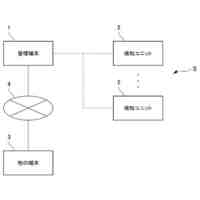
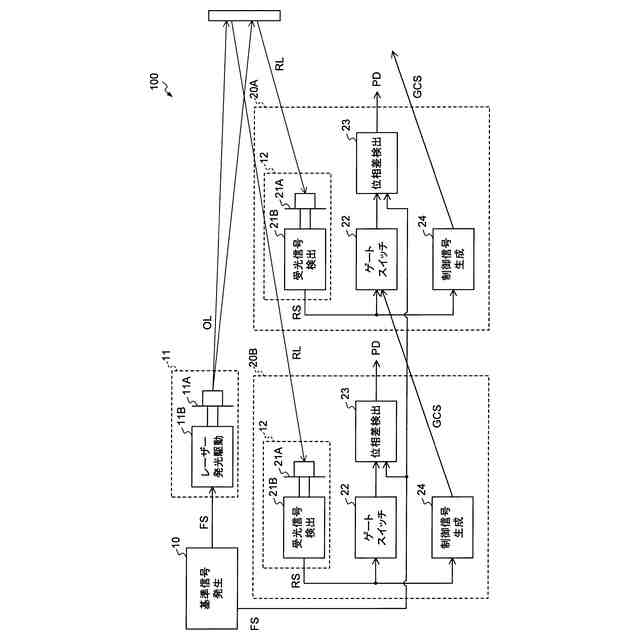
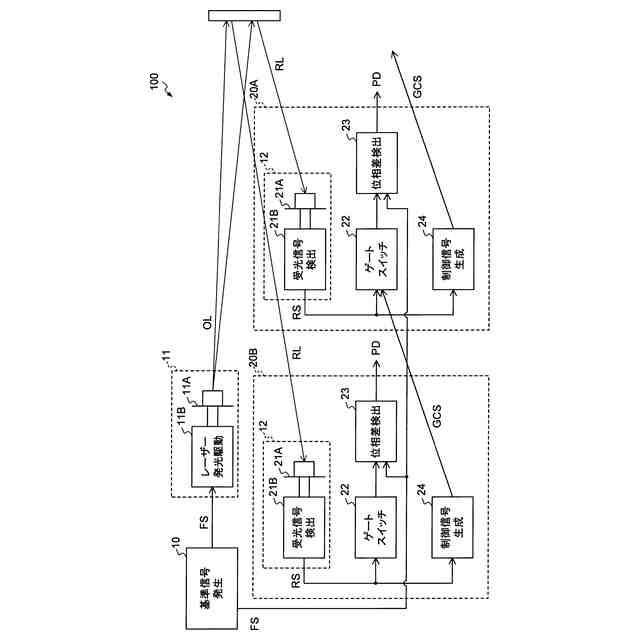
本実施例の測距装置の機能ブロックを示すブロック図である。
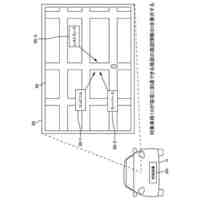
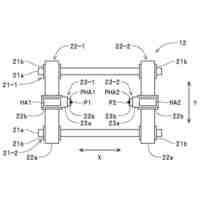
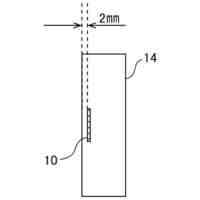
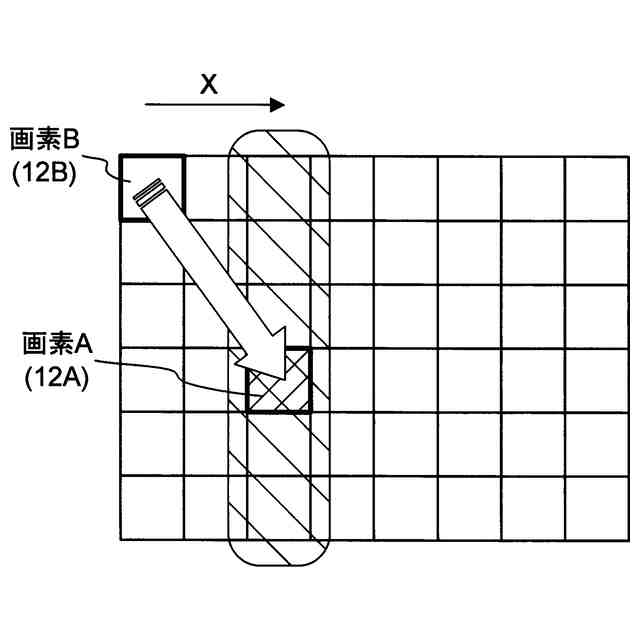
画素Aと画素Bとの位置関係を模式的に示す図である。
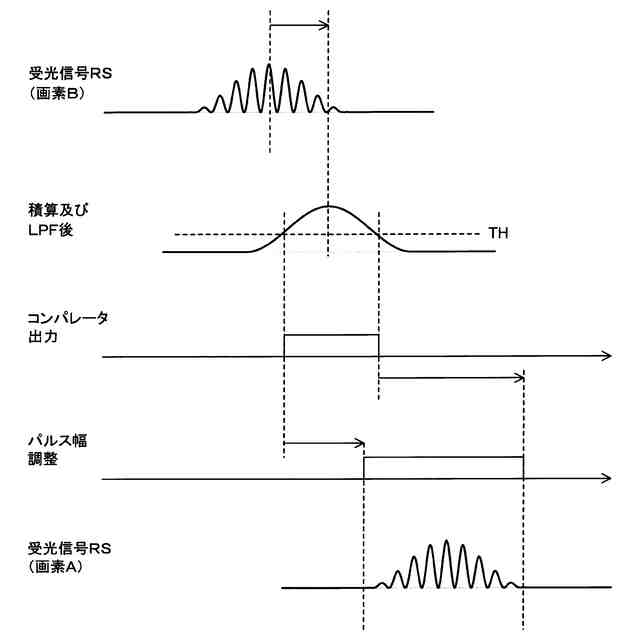
画素Bにおける受光信号の検出が、画素Aに対応する受光処理部での位相差検出部への受光信号の供給の制御に用いられることを模式的に示す図である。
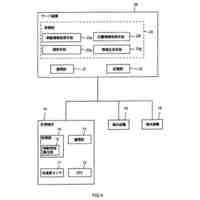
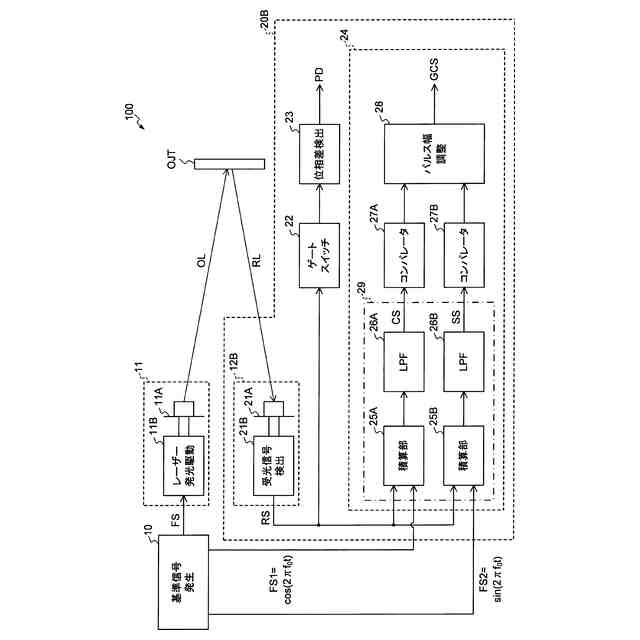
制御信号生成部を構成する機能ブロックを含む測距装置のブロック図である。
制御信号生成部の各機能ブロックで行われる処理を模式的に示す図である。
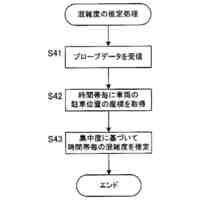
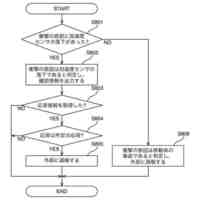
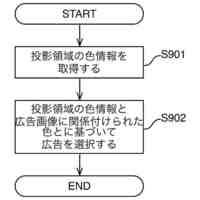
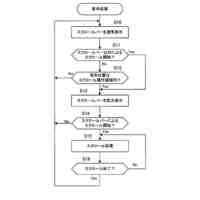
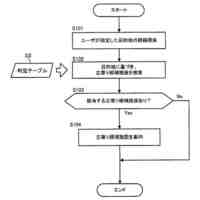
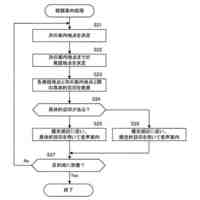
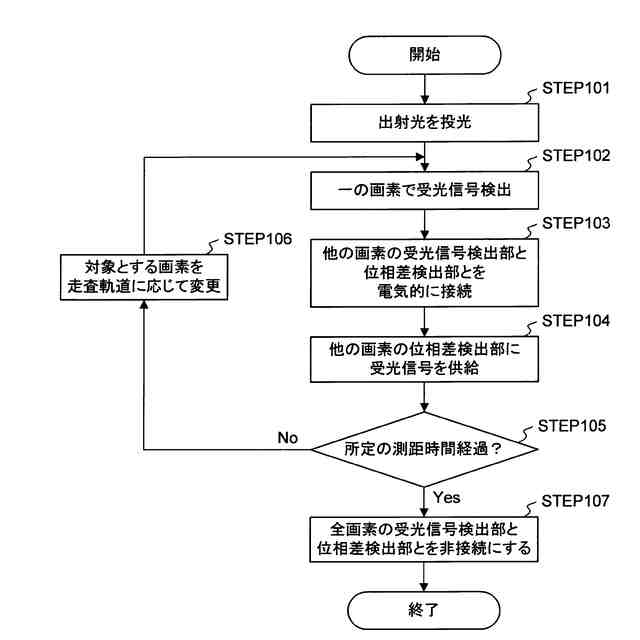
本実施例の測距装置の動作の処理ルーチンを示すフローチャートである。
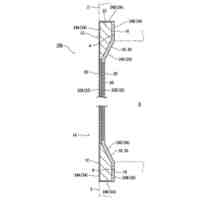
出射光OLがラインビームである場合の画素B及び画素Aの配置を模式的に示す図である。
出射光OLがラインビームである場合の画素B及び画素Aの配置を模式的に示す図である。
2つの画素領域での反射光の受光に基づいて、位相差検出部への受光信号の供給の制御を行う様子を模式的に示す図である。
斜め方向に連続して配置された2つの画素領域での反射光の受光に基づいて、位相差検出部への受光信号の供給の制御を行う様子を模式的に示す図である。
ゲートスイッチが外部からゲート制御信号の供給を受けて受光信号検出部と位相差検出部との間の接続及び非接続を切り替える構成を示すブロック図である。
他の画素領域における反射光の受光結果ではなく、その画素領域自身における反射光の受光結果に基づいてゲートスイッチの制御を行う場合の構成を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
パイオニア株式会社
測定装置
24日前
パイオニア株式会社
制御装置
3日前
パイオニア株式会社
制御装置
11日前
パイオニア株式会社
探索装置
11日前
パイオニア株式会社
情報処理装置
3日前
パイオニア株式会社
情報処理装置
19日前
パイオニア株式会社
情報処理装置
19日前
パイオニア株式会社
情報処理装置
5日前
パイオニア株式会社
情報処理装置
11日前
パイオニア株式会社
アクチュエータ
3日前
パイオニア株式会社
運転指標出力装置
11日前
パイオニア株式会社
調整方法、検出機器及び検出装置
3日前
パイオニア株式会社
表示装置、表示方法及びプログラム
11日前
パイオニア株式会社
情報処理装置、方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
経路案内装置、制御方法、プログラム及び記憶媒体
11日前
パイオニア株式会社
移動体装置、情報処理方法及び情報処理用プログラム
11日前
パイオニア株式会社
情報提供装置、情報提供方法及び情報提供用プログラム
11日前
パイオニア株式会社
表示制御装置、表示制御方法及び表示制御用プログラム
3日前
パイオニア株式会社
情報処理装置、情報処理方法および情報処理プログラム
3日前
パイオニア株式会社
音声出力装置、音声出力方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
推定装置、推定方法、コンピュータプログラム、及び記憶媒体
11日前
パイオニア株式会社
運転評価装置、運転評価方法、運転評価プログラム及び記録媒体
13日前
パイオニア株式会社
情報処理装置、情報処理システム、情報処理方法及びプログラム
3日前
パイオニア株式会社
移動体装置、情報処理方法及び情報処理用プログラム並びに情報処理システム
11日前
ユニパルス株式会社
力変換器
10日前
三菱電機株式会社
計測器
4日前
横浜ゴム株式会社
音響窓
12日前
株式会社豊田自動織機
産業車両
17日前
株式会社ミツトヨ
測定器
1か月前
日置電機株式会社
測定装置
11日前
個人
センサーを備えた装置
14日前
株式会社国際電気
試験装置
24日前
IPU株式会社
距離検出装置
10日前
日本精機株式会社
施工管理システム
14日前
株式会社FRPカジ
FRP装置
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ