TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025088514
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023203262
出願日
2023-11-30
発明の名称
クレーン位置把握システム及びクレーン位置把握方法
出願人
鹿島建設株式会社
代理人
弁理士法人後藤特許事務所
主分類
B66C
13/00 20060101AFI20250604BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】クレーンの配置状況に関わらず、クレーンの位置を把握する。
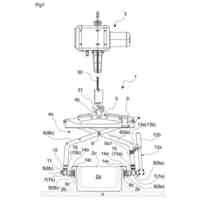
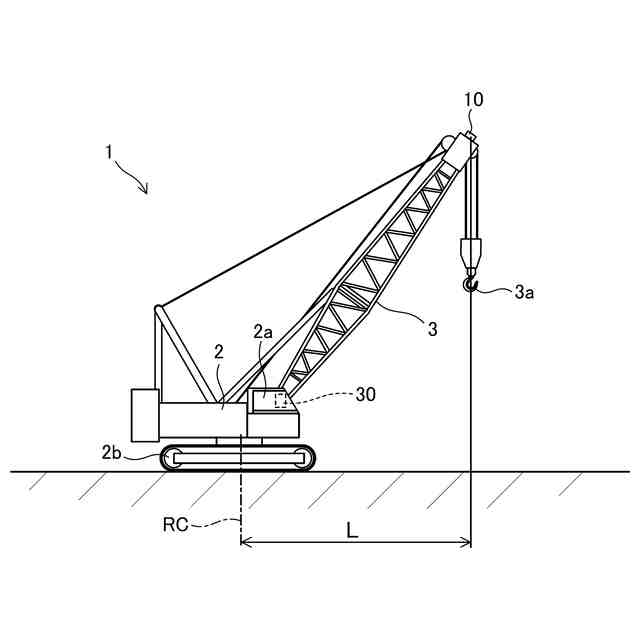
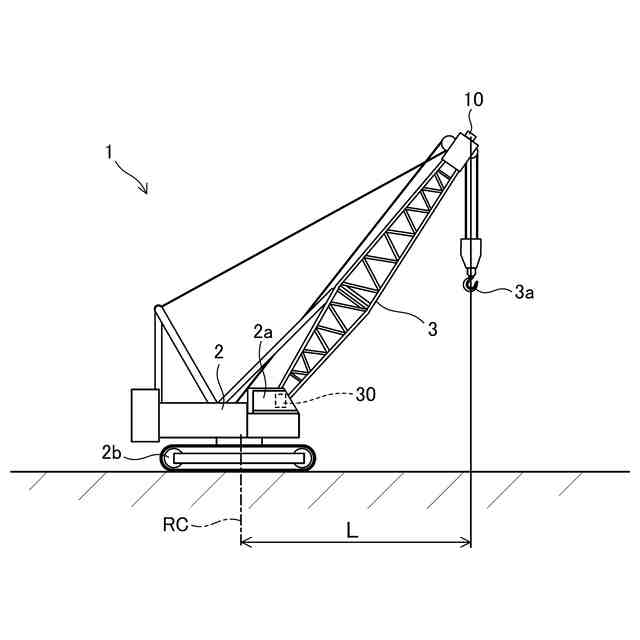
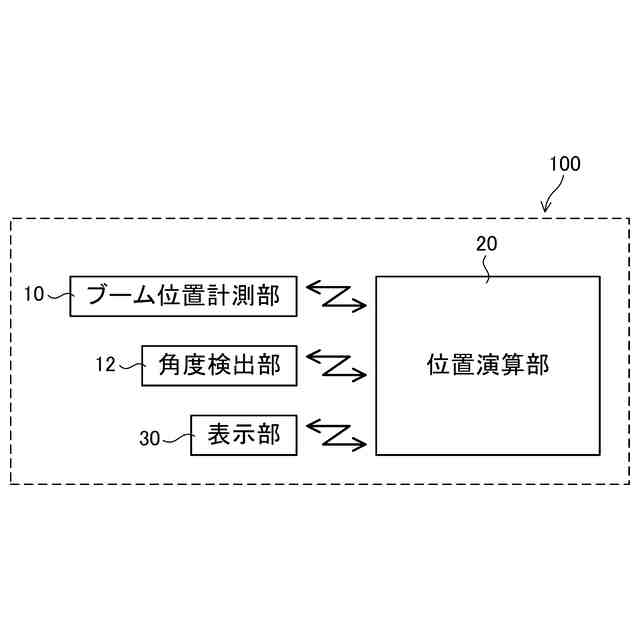
【解決手段】クレーン位置把握システム100は、クレーン1のブーム3の所定箇所の位置を計測可能なブーム位置計測部10と、ブーム3を旋回させた際に、ブーム位置計測部10によって計測されたブーム位置に基づいてブーム3の旋回中心位置を演算する位置演算部20と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
本体部と、前記本体部から延びるブームと、を備えるクレーンの位置を把握するクレーン位置把握システムであって、
前記ブームの所定箇所の位置を計測可能なブーム位置計測部と、
前記ブームを旋回させた際に、前記ブーム位置計測部によって計測されたブーム位置に基づいて前記ブームの旋回中心位置を演算する位置演算部と、を備える、
クレーン位置把握システム。
続きを表示(約 610 文字)
【請求項2】
前記クレーンの状態を表示する表示部をさらに備え、
前記位置演算部は、演算された前記旋回中心位置と、前記ブーム位置計測部により計測された前記ブーム位置と、に基づいて現在の前記クレーンの状態を演算し、演算された現在の前記クレーンの状態を前記表示部に表示する、
請求項1に記載のクレーン位置把握システム。
【請求項3】
前記位置演算部は、隣り合って配置された前記クレーン間の最短距離を、現在の前記クレーンの状態に基づいて演算し、演算された前記最短距離を前記表示部に表示する、
請求項2に記載のクレーン位置把握システム。
【請求項4】
前記ブーム位置計測部は、測位衛星から発信された信号を受信する測位センサであり、前記ブームの先端側に取り付けられる、
請求項1から3の何れか1つに記載のクレーン位置把握システム。
【請求項5】
本体部と、前記本体部から延びるブームと、を備えるクレーンの位置を把握するクレーン位置把握方法であって、
前記ブームの所定箇所の位置を計測可能なブーム位置計測部により計測されたブーム位置を、前記ブームを旋回させた際に取得するブーム位置取得工程と、
取得された前記ブーム位置に基づいて前記ブームの旋回中心位置を演算する旋回中心演算工程と、を含む、
クレーン位置把握方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、クレーン位置把握システム及びクレーン位置把握方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、クレーンの現在位置を特定するために、衛星測位システムを利用したクレーンが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-95369号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般的に衛星測位システムを利用して現在位置を特定するには、3つ以上の測位衛星から発信された信号を受信する必要があるが、例えば、比較的高い建築物に囲まれた作業現場に特許文献1に記載されるようなクレーンが配置された場合には、3つ以上の測位衛星から発信された信号を受信することができず、結果として、クレーンの現在位置を把握することができないおそれがある。
【0005】
本発明は、クレーンの配置状況に関わらず、クレーンの位置を把握することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、本体部と、本体部から延びるブームと、を備えるクレーンの位置を把握するクレーン位置把握システムであって、ブームの所定箇所の位置を計測可能なブーム位置計測部と、ブームを旋回させた際に、ブーム位置計測部によって計測されたブーム位置に基づいてブームの旋回中心位置を演算する位置演算部と、を備える。
【0007】
また、本発明は、本体部と、本体部から延びるブームと、を備えるクレーンの位置を把握するクレーン位置把握方法であって、ブームの所定箇所の位置を計測可能なブーム位置計測部により計測されたブーム位置を、ブームを旋回させた際に取得するブーム位置取得工程と、取得されたブーム位置に基づいてブームの旋回中心位置を演算する旋回中心演算工程と、を含む。
【発明の効果】
【0008】
本発明によれば、クレーンの配置状況に関わらず、クレーンの位置を把握することができる。
【図面の簡単な説明】
【0009】
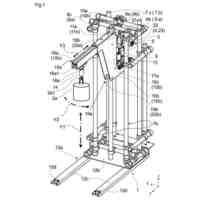
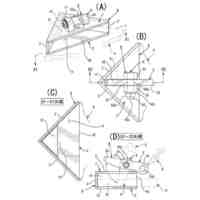
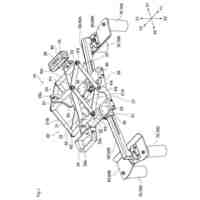
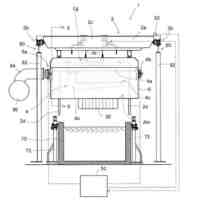
本発明の実施形態に係るクレーン位置把握システムが適用されるクレーンの例を示す概略図である。
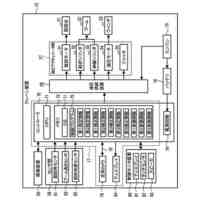
本発明の実施形態に係るクレーン位置把握システムのブロック図である。
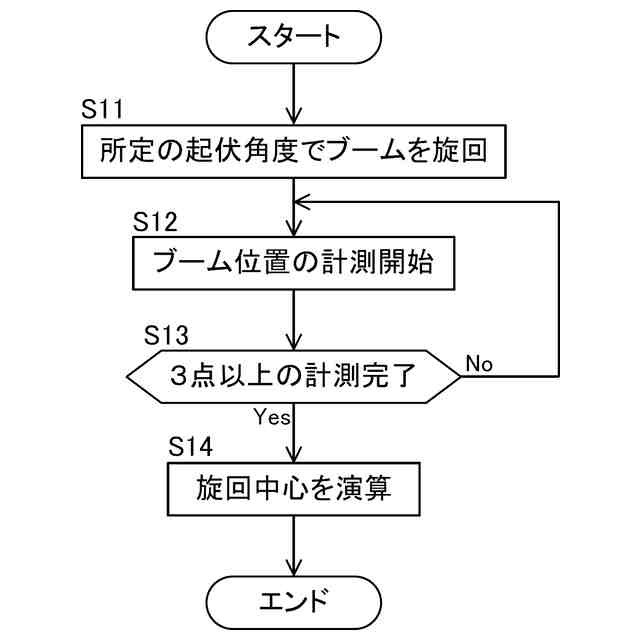
本発明の実施形態に係るクレーン位置把握方法による位置把握手順を示したフローチャートである。
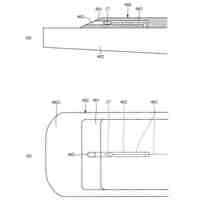
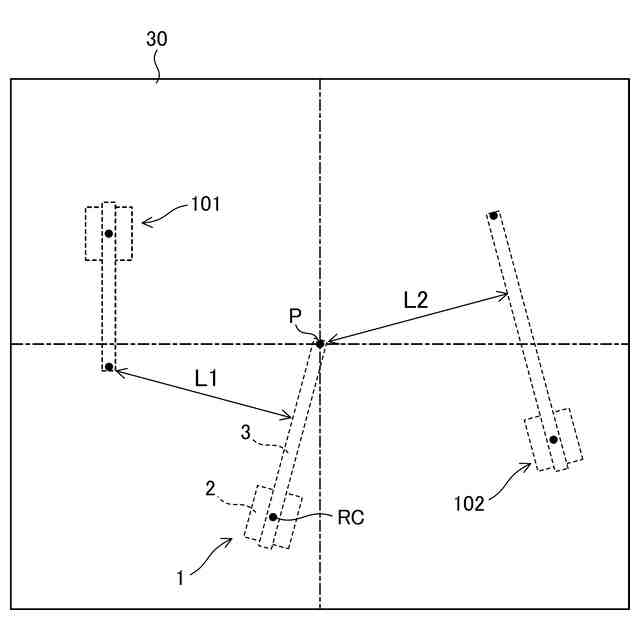
本発明の実施形態に係るクレーン位置把握方法による位置把握手順を説明するための図である。
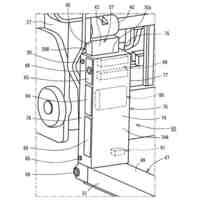
表示部に表示されたクレーンの状態の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明の実施形態に係るクレーン位置把握システム及びクレーン位置把握方法の建設方法について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自走手摺
27日前
個人
懸吊装置
11か月前
ユニパルス株式会社
吊具
2か月前
個人
海上コンテナ昇降装置
8か月前
ユニパルス株式会社
吊具装置
8か月前
ユニパルス株式会社
荷役装置
7か月前
水戸工業株式会社
吊り具
4か月前
株式会社豊田自動織機
産業車両
8か月前
株式会社豊田自動織機
荷役車両
6か月前
ユニパルス株式会社
リフト装置
2か月前
株式会社いうら
車椅子用昇降機
14日前
株式会社豊田自動織機
荷役車両
7か月前
ユニパルス株式会社
荷役助力装置
1か月前
株式会社伊藤
滑り止め装置
9日前
大栄産業株式会社
クランプ
2か月前
白山工業株式会社
バランサ
4か月前
ユニパルス株式会社
荷役助力装置
2か月前
株式会社日本キャリア工業
昇降機
11か月前
ユニパルス株式会社
荷役助力装置
3か月前
株式会社キトー
タイヤ用吊具
3か月前
株式会社ユピテル
システム等
4か月前
個人
建築部材の吊り上げ装置
10か月前
新英運輸株式会社
自動車用台車
3か月前
フジテック株式会社
エレベータ
6か月前
株式会社豊田自動織機
フォークリフト
5か月前
株式会社大林組
養生方法
10か月前
株式会社五十鈴製作所
搬送装置
2か月前
株式会社キトー
吊具
11か月前
白山工業株式会社
腕重量補償機構
10か月前
中坪造園有限会社
吊り荷降ろし具
2か月前
株式会社タダノ
高所作業車
10か月前
フジテック株式会社
エスカレータ
4か月前
有限会社サエキ
玉掛用器具
7か月前
株式会社タダノ
クレーン装置
7か月前
株式会社スギヤス
車両整備用リフト
8か月前
株式会社スギヤス
車両整備用リフト
8か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ