TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025076950
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188937
出願日
2023-11-02
発明の名称
遠隔操作器
出願人
古河ユニック株式会社
代理人
個人
,
個人
,
個人
主分類
B66C
13/40 20060101AFI20250509BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】機体の左右それぞれにクローラを備えた産業用機械の走行操作に好適な遠隔操作器を提供すること。
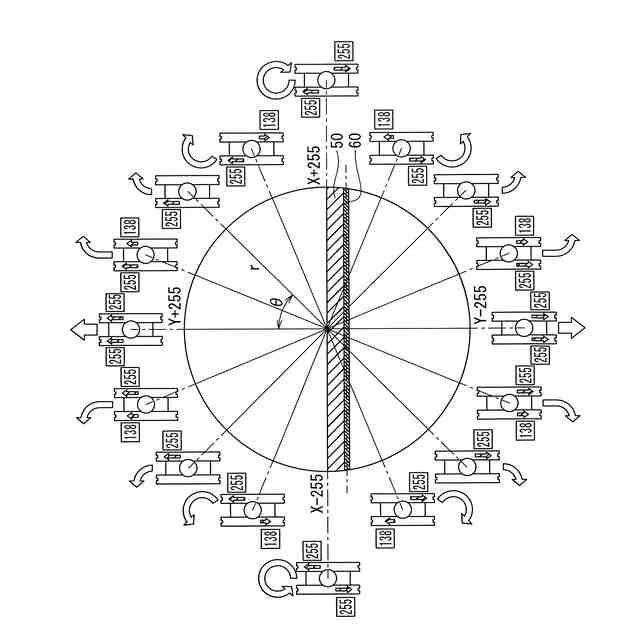
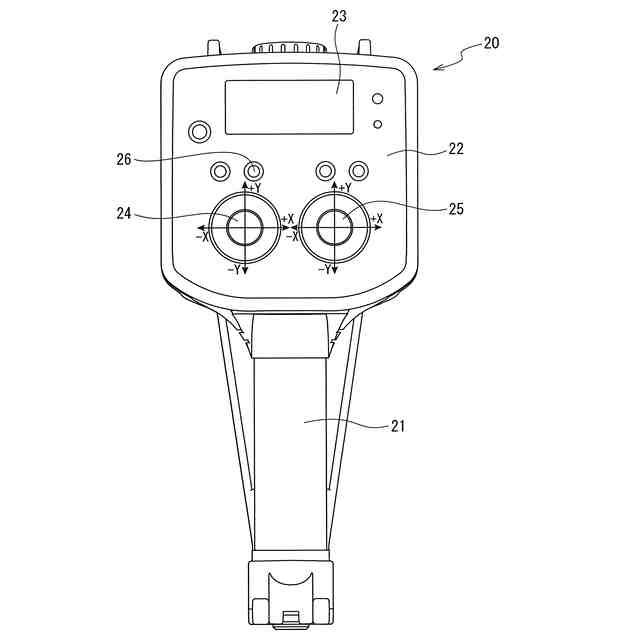
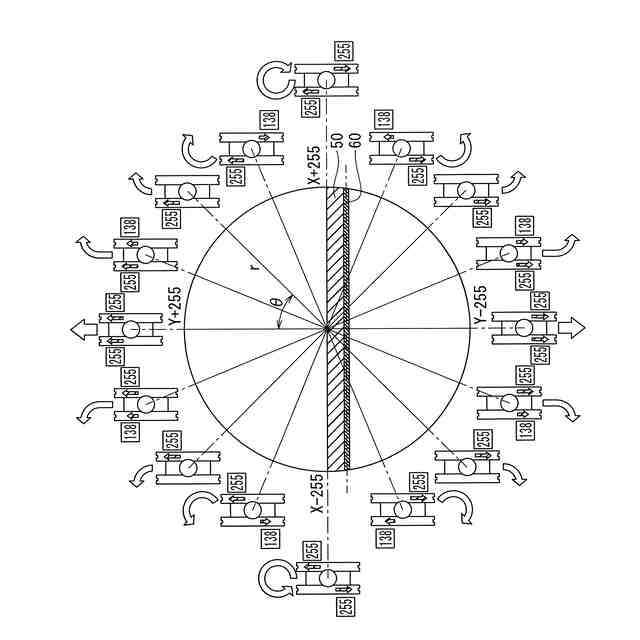
【解決手段】左スティック24の座標が(X:-255,Y:0)であれば極座標系においては(r:255,θ:-90゜)となり、左右のクローラ2の回転速度差が最大に設定され、それぞれが同じ回転速度で反対方向に回転する。そのため、クローラクレーン1は最大の速度で反時計回りに超信地旋回する。また、(X:0,Y:+255)であれば極座標系においては(r:255,θ:0゜)であるため、左右のクローラ2に回転速度差は設定されず、クローラクレーン1は最高速度で前進する。左スティック24の入力値が(X:122,Y:122)であった場合、極座標系においては略(r:255、θ:45゜)となる。この場合、左クローラ2Lを最高速度で回転させ、右クローラ2Rを停止させて時計回り方向の信地旋回を行う。
【選択図】図7
特許請求の範囲
【請求項1】
機体の左右それぞれにクローラを備えた産業用機械を操作するための遠隔操作器であって、
前記産業用機械の走行操作が可能なジョイスティックと、
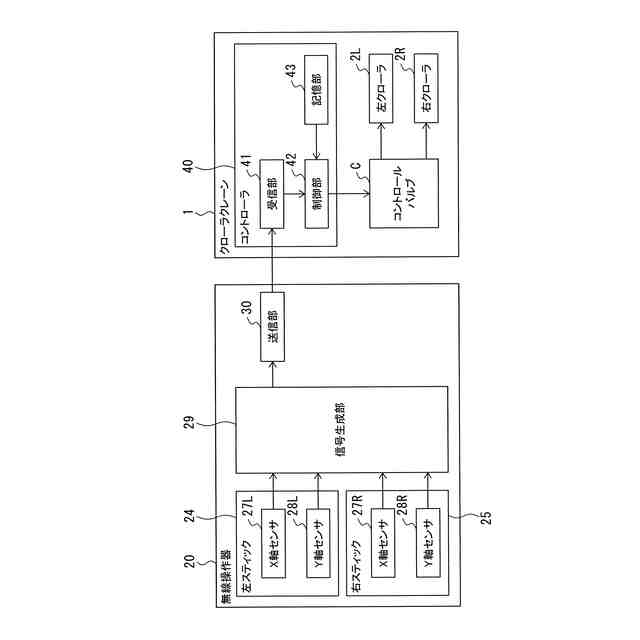
前記産業用機械を動作させるための操作指令信号を生成する信号生成部と、を備え、
前記信号生成部は、前記ジョイスティックの傾きの大きさに比例して前記クローラの回転速度を設定し、前記ジョイスティックの傾きの方向に対応して左右の前記クローラの回転方向及び回転速度差を設定した操作指令信号を生成する第一操作モードに設定可能なことを特徴とする遠隔操作器。
続きを表示(約 1,100 文字)
【請求項2】
前記ジョイスティックは、傾きの大きさ及び方向の検出軸として、直交する第一軸と第二軸とを備え、
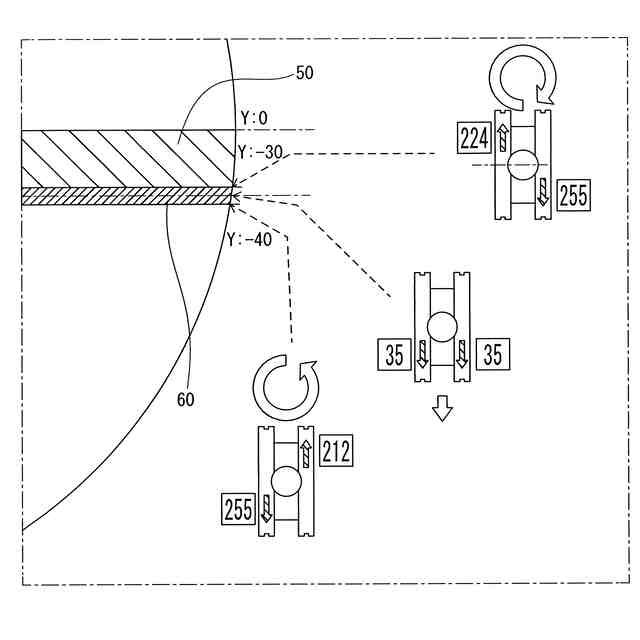
前記第一軸の入力値が負の値となる所定の範囲に、該第一軸に正の値が入力されている場合と同じ回転方向のまま左右の前記クローラに回転速度差を発生させる旋回冗長領域が設定されていることを特徴とする請求項1に記載の遠隔操作器。
【請求項3】
前記旋回冗長領域が設定される所定の範囲は、前記第一軸の入力値が0となる位置から前記第一軸の不側最大値の10%~12%の間の所定の値になる位置までの間であることを特徴とする請求項2に記載の遠隔操作器。
【請求項4】
前記第一軸の入力値が負の値となり前記旋回冗長領域と接する所定の範囲に、前記第二軸の入力値に関わらず左右の前記クローラに回転速度差を発生させない不感領域が設定されていることを特徴とする請求項2に記載の遠隔操作器。
【請求項5】
前記不感領域が設定される所定の範囲は、前記旋回冗長領域の端から、前記第一軸の不側最大値の14%~16%の間の所定の値になる位置までの間であることを特徴とする請求項4に記載の遠隔操作器。
【請求項6】
前記産業用機械は、左右の前記クローラの間の幅を変更可能であり、
さらに、拡幅信号と縮幅信号とを出力可能な入力部を備えており
前記信号生成部は、前記入力部から拡幅信号が出力された場合には左右の前記クローラの間の幅を広げさせ、縮幅信号が出力された場合には左右の前記クローラの間の幅を狭めさせる操作指令信号を生成することを特徴とする請求項1から請求項5のいずれかに記載の遠隔操作器。
【請求項7】
前記産業用機械は、左右の前記クローラの間の幅を変更可能であり、
前記遠隔操作器は、第一スティックと第二スティックとを備えており、
前記第一スティックは、前記ジョイスティックであり、
前記第二スティックは、操作量の検出軸として第三軸と第四軸とを有しており、
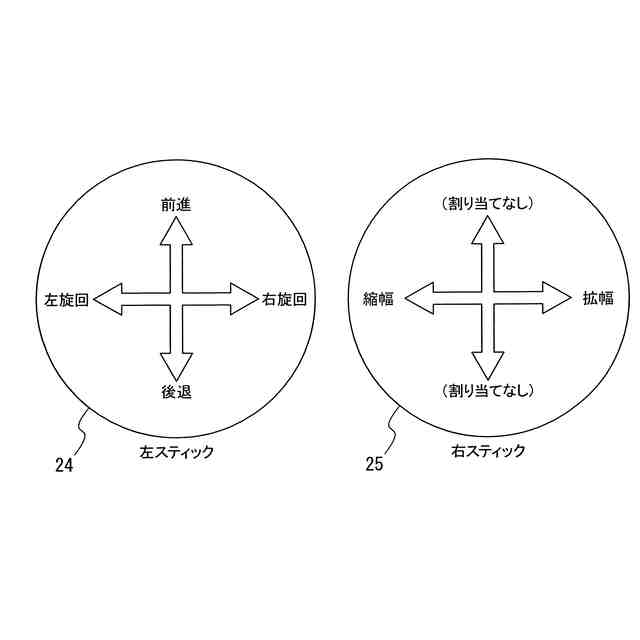
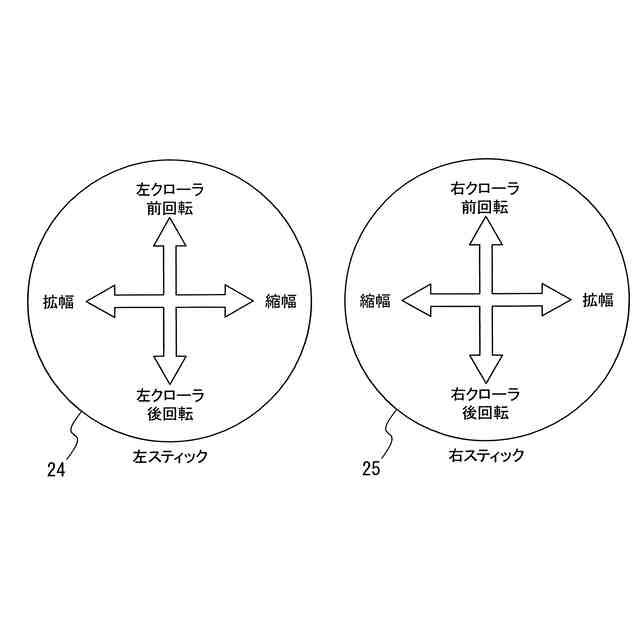
前記信号生成部は、前記第一スティックの一つの検出軸に前記クローラの一方を対応させ、前記第二スティックの一つの検出軸に前記クローラの他方を対応させて、直交座標系における入力値の正負を回転方向とし、入力値の絶対値の大小を回転速度の高低として操作指令信号を生成し、前記第一スティック又は前記第二スティックにおける、前記クローラの回転方向及び回転速度の操作が割り当てられていない軸を、外側に傾けた場合には、左右の前記クローラの間の幅を広げさせ、内側に傾けた場合には左右の前記クローラの間の幅を狭めさせる操作指令信号を生成する第二操作モードに設定可能であることを特徴とする請求項1から請求項5のいずれかに記載の遠隔操作器。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用機械の遠隔操作器に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
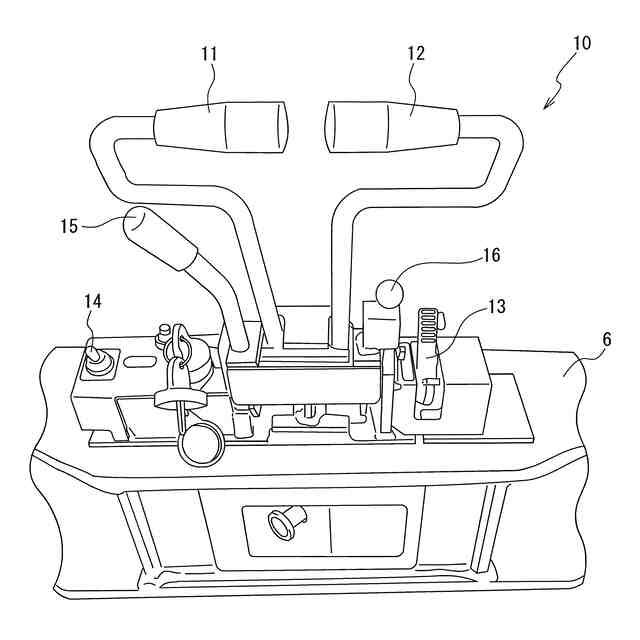
従来、機体の左右それぞれにクローラ装置を備えた産業用機械の走行操作装置として、前後に押し引きすることで左右のクローラ装置を独立して正転又は逆転させるレバーが用いられている。しかしこのような走行操作装置の場合、左右のクローラ装置は独立して動作するため、産業用機械を自在に前進、後進及び旋回させるためには、作業者に一定の習熟が必要であった。また、走行時には必ず両手で操作を行わなければならず、走行レバーを操作しながら変速や警笛等の操作を行うことが困難であった。
【0003】
このような走行操作の困難性は、遠隔操作器を用いることで緩和が可能である。例えば、特許文献1に開示されているような遠隔操作器を、上述したレバー操作に対応させれば、作業者がトグルスイッチを操作しつつ変速用のスイッチを操作する動作を指で行うことができる。しかし、特許文献1に開示されているような遠隔操作器をはじめとして、遠隔操作器の多くは作業機の操作に特化した構成をとっており、必ずしも走行操作に好適な構成ではない。
【0004】
特に、特許文献1に開示されているような構成の遠隔操作器は、作業機の操作用にモーメンタリ型のスイッチを備えているため、レバー操作と同様の操作方法を適用した場合には、直進、信地旋回又は超信地旋回しか行うことができず、産業用機械を自在に走行させるには熟練を要する。
そこで、特許文献2に開示されているような、操作部にジョイスティックを備えた遠隔操作器を走行操作に用いることが考えられる。このような遠隔操作器は、ON-OFF制御のみが可能なスイッチ方式では不可能な、左右のクローラに速度差を発生させて旋回を行うような動作が可能になり、操作性の向上が可能である。
【先行技術文献】
【特許文献】
【0005】
特開2008-081260号公報
特開2017-030924号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、左右のレバーと左右のクローラとが一対一で対応している操作方式は、レバーやジョイスティックの前後方向の操作だけで旋回操作も行う必要があるため必ずしも直感的ではない。
また、操作者は依然として操作に両手を使用しなければならない。
そのため、レバー操作を単純にジョイスティック式の遠隔操作器に適用した場合であっても、産業用機械を自在に走行させるためには熟練を要する。
【0007】
このような実情に鑑み、本発明は、機体の左右それぞれにクローラを備えた産業用機械の走行操作に好適な遠隔操作器を提供することを目的とする。
【課題を解決するための手段】
【0008】
第一の発明は、機体の左右それぞれにクローラを備えた産業用機械を操作するための遠隔操作器であって、前記産業用機械の走行操作が可能なジョイスティックと、前記産業用機械を動作させるための操作指令信号を生成する信号生成部と、を備え、
前記信号生成部は、前記ジョイスティックの傾きの大きさに比例して前記クローラの回転速度を設定し、前記ジョイスティックの傾きの方向に対応して左右の前記クローラの回転方向及び回転速度差を設定した操作指令信号を生成する第一操作モードに設定可能なことを特徴とする遠隔操作器である。
【0009】
第二の発明は、第一の発明に記載の前記ジョイスティックは、傾きの大きさ及び方向の検出軸として、直交する第一軸と第二軸とを備え、
前記第一軸の入力値が負の値となる所定の範囲に、該第一軸に正の値が入力されている場合と同じ回転方向のまま左右の前記クローラに回転速度差を発生させる旋回冗長領域が設定されていることを特徴とする遠隔操作器である。
【0010】
第三の発明は、第一の発明に記載の前記旋回冗長領域が設定される所定の範囲は、前記第一軸の入力値が0となる位置から前記第一軸の不側最大値の10%~12%の間の所定の値になる位置までの間であることを特徴とする遠隔操作器である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
自走手摺
21日前
個人
懸吊装置
11か月前
ユニパルス株式会社
吊具
2か月前
個人
海上コンテナ昇降装置
7か月前
ユニパルス株式会社
吊具装置
8か月前
ユニパルス株式会社
荷役装置
7か月前
ユニパルス株式会社
リフト装置
2か月前
株式会社豊田自動織機
産業車両
8か月前
水戸工業株式会社
吊り具
4か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社いうら
車椅子用昇降機
8日前
株式会社豊田自動織機
荷役車両
7か月前
ユニパルス株式会社
荷役助力装置
29日前
ユニパルス株式会社
荷役助力装置
2か月前
株式会社伊藤
滑り止め装置
3日前
ユニパルス株式会社
荷役助力装置
3か月前
白山工業株式会社
バランサ
4か月前
大栄産業株式会社
クランプ
2か月前
株式会社日本キャリア工業
昇降機
11か月前
個人
建築部材の吊り上げ装置
9か月前
株式会社キトー
タイヤ用吊具
3か月前
株式会社ユピテル
システム等
3か月前
株式会社豊田自動織機
フォークリフト
5か月前
株式会社大林組
養生方法
10か月前
新英運輸株式会社
自動車用台車
3か月前
フジテック株式会社
エレベータ
6か月前
株式会社五十鈴製作所
搬送装置
2か月前
フジテック株式会社
エスカレータ
4か月前
株式会社キトー
吊具
10か月前
中坪造園有限会社
吊り荷降ろし具
2か月前
有限会社サエキ
玉掛用器具
7か月前
株式会社タダノ
高所作業車
10か月前
白山工業株式会社
腕重量補償機構
10か月前
大和ハウス工業株式会社
パネル吊具
29日前
株式会社タダノ
クレーン装置
7か月前
株式会社スギヤス
車両整備用リフト
8か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ