TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025070034
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023180060
出願日
2023-10-19
発明の名称
配置装置、配置方法、プログラム
出願人
キヤノン株式会社
代理人
弁理士法人秀和特許事務所
主分類
G06T
19/00 20110101AFI20250424BHJP(計算;計数)
要約
【課題】物体の位置姿勢とCGモデルの位置姿勢との関係の推定をより効率的に実現する。
【解決手段】形状が物体と略一致するCGモデルを特定の空間において前記物体と重なるように配置する配置装置は、第1の物体に配置された複数のマーカーの3次元位置を取得する位置取得手段と、前記複数のマーカーの3次元位置に基づき、前記第1の物体と形状が略一致する第1のCGモデルを選択する選択手段と、前記複数のマーカーの3次元位置に基づき、前記選択手段により選択された前記第1のCGモデルと前記第1の物体との相対的な位置姿勢の関係を推定する推定手段と、前記推定手段が推定した位置姿勢の関係に基づき、前記特定の空間において前記第1の物体と重なるように前記第1のCGモデルを配置する配置手段と、を有する。
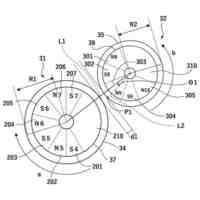
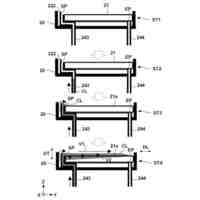
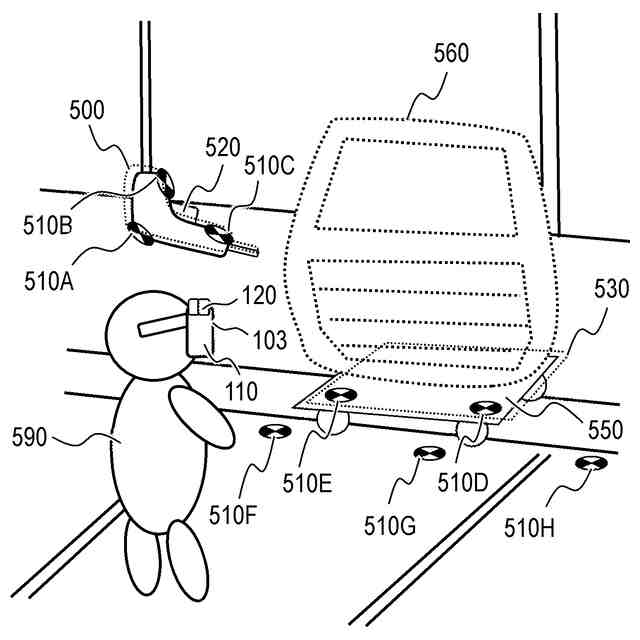
【選択図】図5
特許請求の範囲
【請求項1】
形状が物体と略一致するCGモデルを特定の空間において前記物体と重なるように配置する配置装置であって、
第1の物体に配置された複数のマーカーの3次元位置を取得する位置取得手段と、
前記複数のマーカーの3次元位置に基づき、前記第1の物体と形状が略一致する第1のCGモデルを選択する選択手段と、
前記複数のマーカーの3次元位置に基づき、前記選択手段により選択された前記第1のCGモデルと前記第1の物体との相対的な位置姿勢の関係を推定する推定手段と、
前記推定手段が推定した位置姿勢の関係に基づき、前記特定の空間において前記第1の物体と重なるように前記第1のCGモデルを配置する配置手段と、
を有することを特徴とする配置装置。
続きを表示(約 1,300 文字)
【請求項2】
前記選択手段は、前記複数のマーカーの3次元位置に基づき、複数のCGモデルのうちから前記第1のCGモデルを選択する、
ことを特徴とする請求項1に記載の配置装置。
【請求項3】
前記選択手段は、前記第1の物体の体積と、前記複数のCGモデルの体積とに基づき、前記第1のCGモデルを選択する、
ことを特徴とする請求項2に記載の配置装置。
【請求項4】
前記選択手段は、1)前記複数のマーカーの3次元位置に基づき、前記複数のマーカーを内包する最小の直方体の体積を、前記第1の物体の体積として算出し、2)前記CGモデルの各頂点を内包する最小の直方体の体積を、前記CGモデルの体積として算出する、ことを特徴とする請求項3に記載の配置装置。
【請求項5】
前記選択手段は、前記複数のマーカーを内包する最小の直方体の辺の比と、前記CGモデルの各頂点を内包する最小の直方体の辺の比に基づき、前記第1のCGモデルを選択する、
ことを特徴とする請求項2から4のいずれか1項に記載の配置装置。
【請求項6】
前記推定手段は、前記第1のCGモデルのポリゴン表面と前記第1の物体に配置した複数のマーカーのそれぞれとの距離の合計が最小であるような、前記第1のCGモデルと前記第1の物体との相対的な位置姿勢の関係を推定する、
ことを特徴とする請求項1から4のいずれか1項に記載の配置装置。
【請求項7】
前記位置取得手段は、撮像装置が前記第1の物体を撮像した画像に基づき、前記複数のマーカーの3次元位置を取得する、
ことを特徴とする請求項1から4のいずれか1項に記載の配置装置。
【請求項8】
前記第1の物体が動いた場合に、前記第1の物体とともに動いた全てのマーカーを、前記第1の物体に配置された前記複数のマーカーとして判定する判定手段をさらに有する、ことを特徴とする請求項7に記載の配置装置。
【請求項9】
前記位置取得手段は、撮像装置が前記第1の物体を撮像した画像に基づき、前記複数のマーカーの3次元位置および前記第1の物体における1または複数の特徴点の3次元位置を取得し、
前記推定手段は、前記複数のマーカーの3次元位置と前記1または複数の特徴点の3次元位置に基づき、前記選択手段により選択された前記第1のCGモデルと前記第1の物体との相対的な位置姿勢の関係を推定する、
ことを特徴とする請求項1から4のいずれか1項に記載の配置装置。
【請求項10】
前記位置取得手段は、前記撮像装置が前記第1の物体を撮像した複数の画像に基づき、前記複数のマーカーの3次元位置および前記第1の物体における1または複数の特徴点の3次元位置を取得し、
前記推定手段は、前記1または複数の特徴点のうち検出された回数が所定回よりも多い特徴点の3次元位置と、前記複数のマーカーの3次元位置とに基づき、前記選択手段により選択された前記第1のCGモデルと前記第1の物体との相対的な位置姿勢の関係を推定する、
ことを特徴とする請求項9に記載の配置装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、CGモデルの配置装置、配置方法、プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、表示デバイスの動きに応じてCG(コンピュータグラフィックス)モデルを描画するシステムは、体験者が手に持つ物体または現実空間を動く物体にCGモデルを重畳して表示する。このようなシステムでは、物体の位置姿勢に応じた適切な位置姿勢にCGモデルを制御することが重要である。
【0003】
特許文献1では、システムに距離センサを搭載して、距離センサから得られた距離画像とCGモデルの奥行き値とに基づき、物体とCGモデルとの位置姿勢の関係を算出する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
米国特許第10817724号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1では、物体に対応するCGモデルの選択をユーザが行う必要があり、物体の位置姿勢(位置および姿勢)とCGモデルの位置姿勢の関係の推定が効率的に実現できない場合がある。
【0006】
そこで、本発明は、物体の位置姿勢とCGモデルの位置姿勢との関係の推定をより効率的に実現することを目的とする。
【課題を解決するための手段】
【0007】
本発明の1つの態様は、
形状が物体と略一致するCGモデルを特定の空間において前記物体と重なるように配置する配置装置であって、
第1の物体に配置された複数のマーカーの3次元位置を取得する位置取得手段と、
前記複数のマーカーの3次元位置に基づき、前記第1の物体と形状が略一致する第1のCGモデルを選択する選択手段と、
前記複数のマーカーの3次元位置に基づき、前記選択手段により選択された前記第1のCGモデルと前記第1の物体との相対的な位置姿勢の関係を推定する推定手段と、
前記推定手段が推定した位置姿勢の関係に基づき、前記特定の空間において前記第1の物体と重なるように前記第1のCGモデルを配置する配置手段と、
を有することを特徴とする配置装置である。
【0008】
本発明の1つの態様は、
形状が物体と略一致するCGモデルを特定の空間において前記物体と重なるように配置する配置方法であって、
第1の物体に配置された複数のマーカーの3次元位置を取得する位置取得ステップと、
前記複数のマーカーの3次元位置に基づき、前記第1の物体と形状が略一致する第1のCGモデルを選択する選択ステップと、
前記複数のマーカーの3次元位置に基づき、前記選択ステップにおいて選択された前記第1のCGモデルと前記第1の物体との相対的な位置姿勢の関係を推定する推定ステップ
と、
前記推定ステップにおいて推定された位置姿勢の関係に基づき、前記特定の空間において前記第1の物体と重なるように前記第1のCGモデルを配置する配置ステップと、
を有することを特徴とする配置方法である。
【発明の効果】
【0009】
本発明によれば、物体の位置姿勢とCGモデルの位置姿勢との関係の推定をより効率的に実現することができる。
【図面の簡単な説明】
【0010】
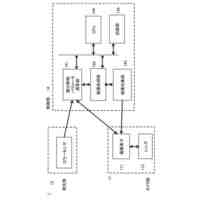
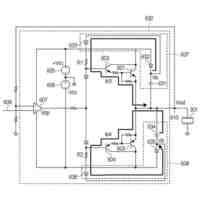
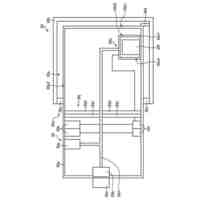
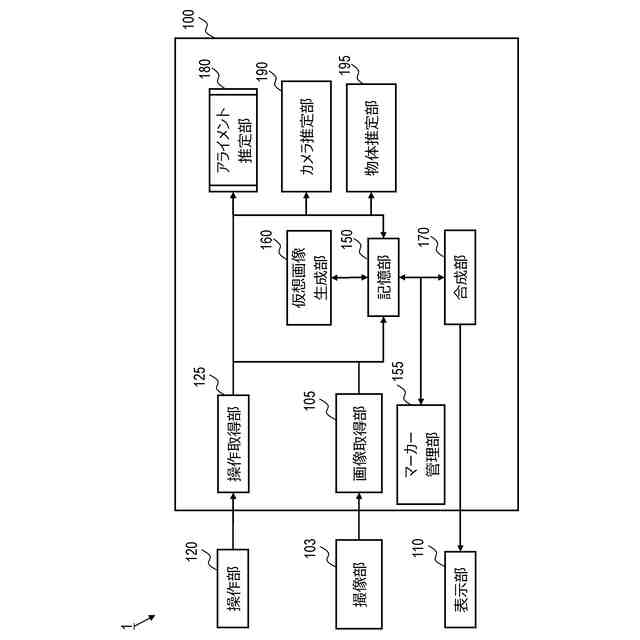
実施形態1に係るHMDのブロック図である。
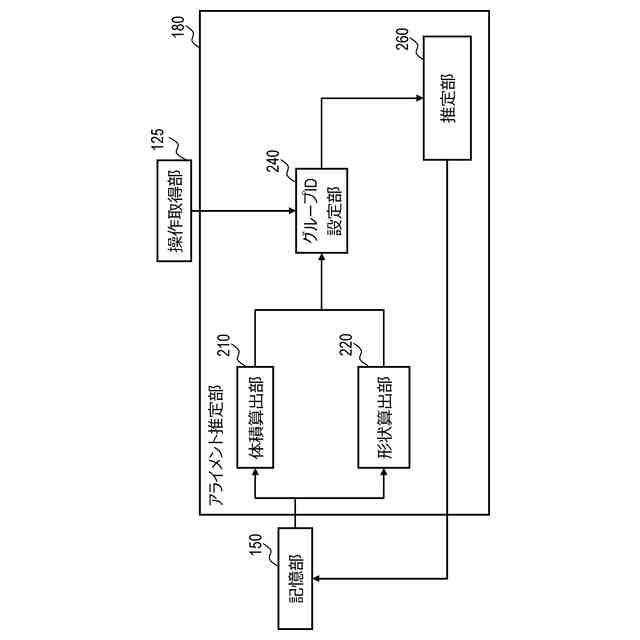
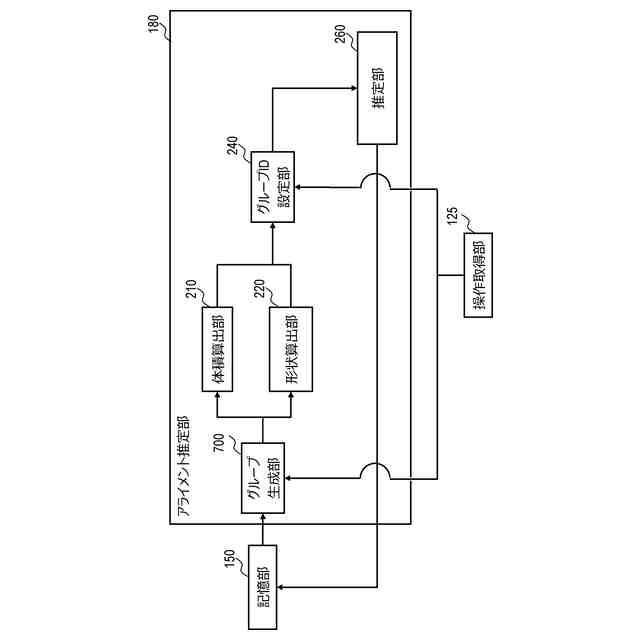
実施形態1に係るアライメント推定部の内部構成図である。
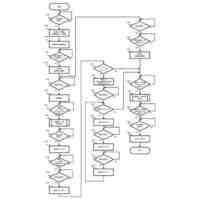
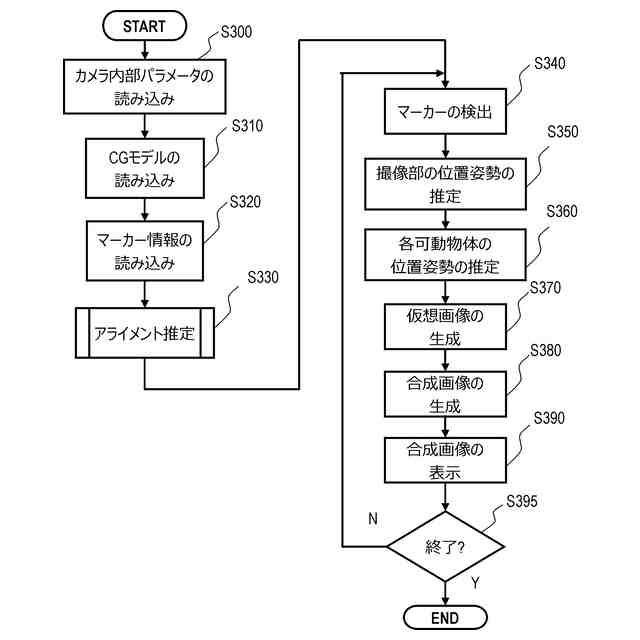
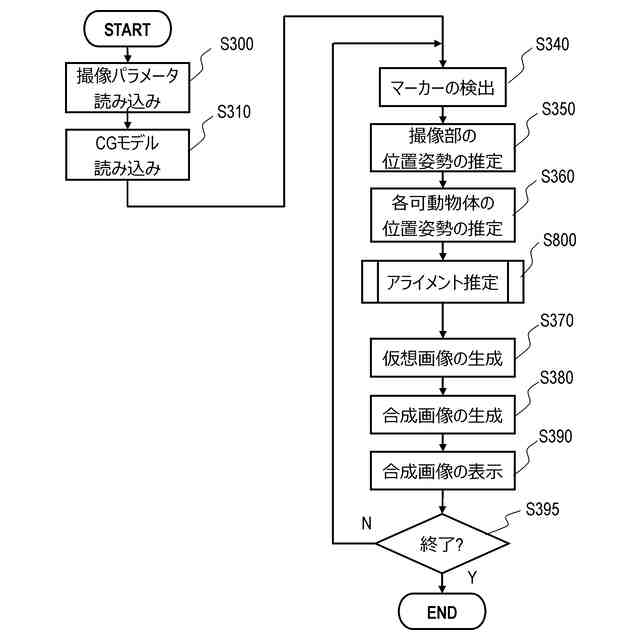
実施形態1に係る合成画像の表示処理のフローチャートである。
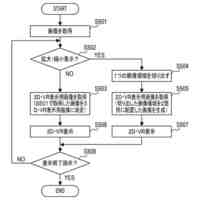
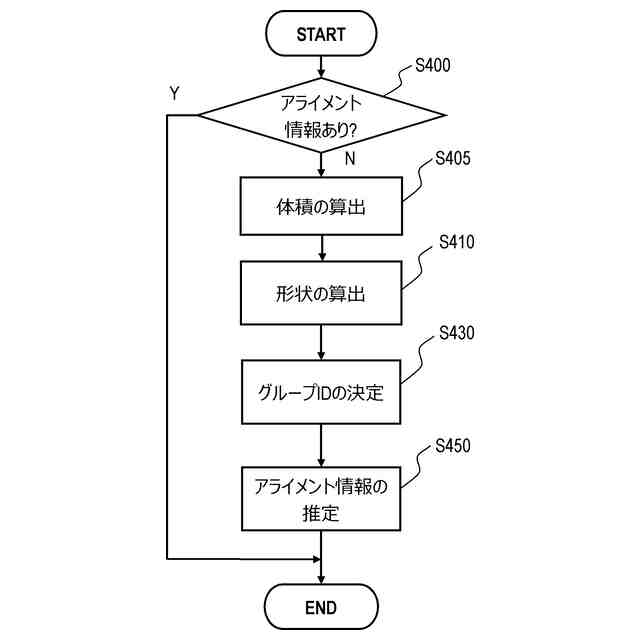
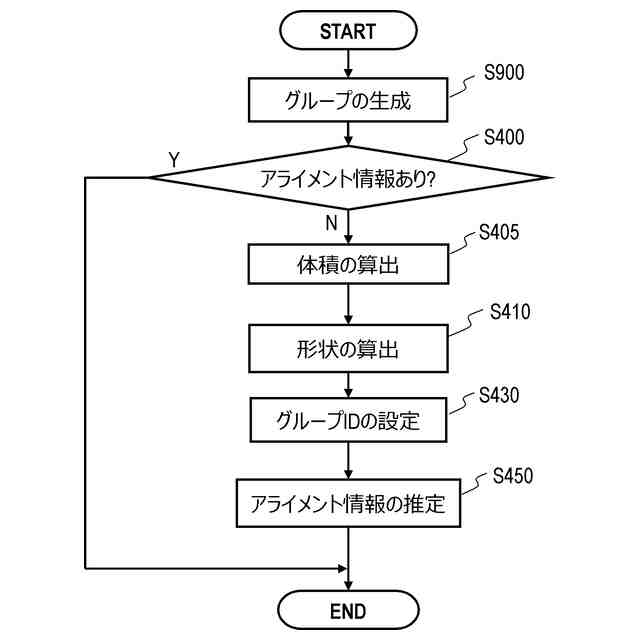
実施形態1に係るアライメント推定部の処理のフローチャートである。
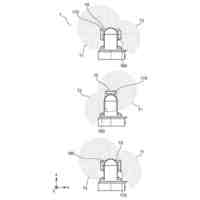
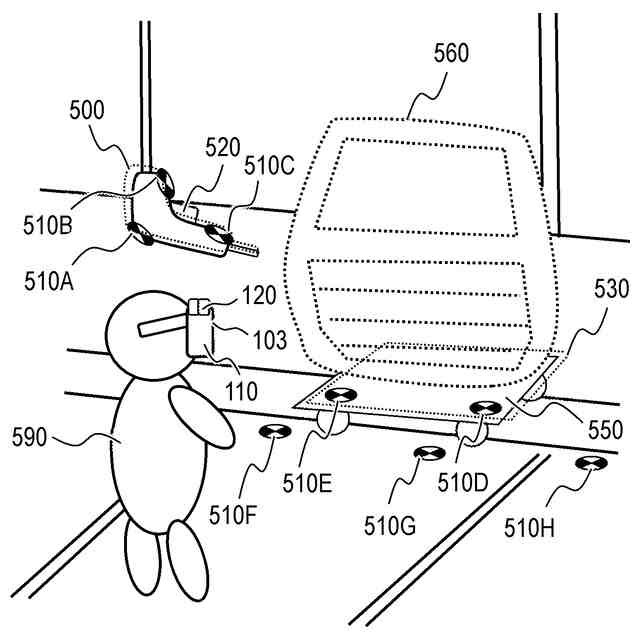
実施形態1に係る複合現実空間を表す図である。
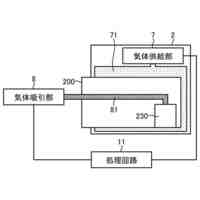
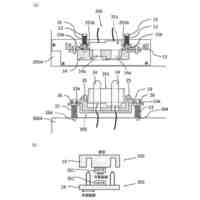
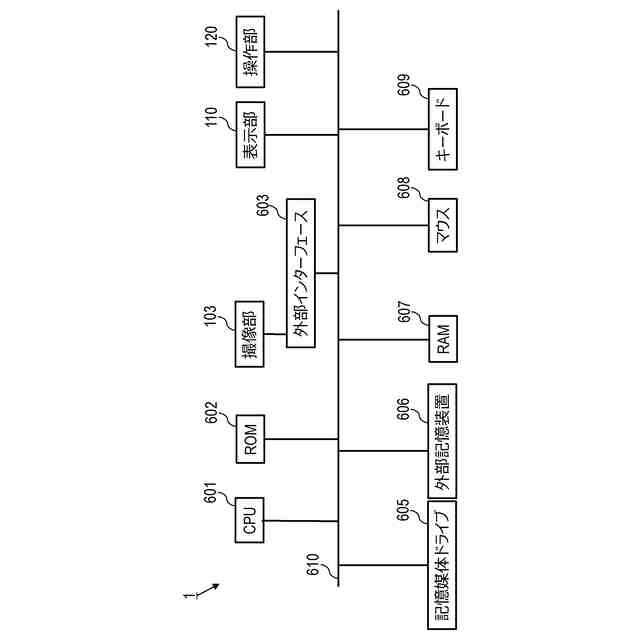
実施形態1に係るHMDのハードウェア構成図である。
実施形態2に係るアライメント推定部の内部構成図である。
実施形態2に係る合成画像の表示処理のフローチャートである。
実施形態2に係るアライメント推定部の処理のフローチャートである。
実施形態3に係るHMDのブロック図である。
実施形態1に係るグループIDの対応付けを説明する図である。
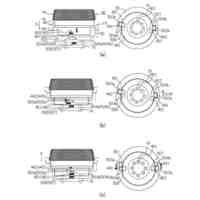
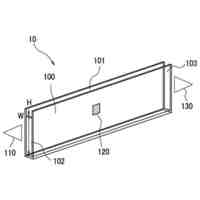
実施形態1に係るマーカー直方体を説明する図である。
実施形態1に係るアライメント情報の推定を説明する図である。
マーカー情報および特徴点情報を説明する図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
11日前
キヤノン株式会社
トナー
16日前
キヤノン株式会社
トナー
16日前
キヤノン株式会社
トナー
16日前
キヤノン株式会社
トナー
11日前
キヤノン株式会社
トナー
16日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
現像装置
19日前
キヤノン株式会社
電子機器
9日前
キヤノン株式会社
現像装置
19日前
キヤノン株式会社
電子機器
5日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
撮像装置
9日前
キヤノン株式会社
撮像装置
16日前
キヤノン株式会社
定着装置
16日前
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
培養装置
16日前
キヤノン株式会社
培養装置
16日前
キヤノン株式会社
記録装置
17日前
キヤノン株式会社
培養装置
16日前
キヤノン株式会社
光学装置
17日前
キヤノン株式会社
記録装置
3日前
キヤノン株式会社
撮像装置
9日前
キヤノン株式会社
プログラム
11日前
キヤノン株式会社
プログラム
11日前
キヤノン株式会社
プログラム
11日前
キヤノン株式会社
欠陥検査装置
3日前
キヤノン株式会社
画像形成装置
18日前
キヤノン株式会社
画像形成装置
18日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
液体吐出装置
3日前
キヤノン株式会社
培養システム
16日前
キヤノン株式会社
無線通信装置
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ