TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025069823
公報種別
公開特許公報(A)
公開日
2025-05-01
出願番号
2023179792
出願日
2023-10-18
発明の名称
車両用制御装置
出願人
スズキ株式会社
代理人
弁理士法人日誠国際特許事務所
主分類
B60L
15/20 20060101AFI20250423BHJP(車両一般)
要約
【課題】バッテリの実電力が制限値を超えることを確実に防止しつつ、バッテリの性能を十分に使い切ることができる車両用制御装置を提供すること。
【解決手段】制御部は、所定のバッテリ電力上限値から所定の補正量であるMG損失上限補正値を減算した値を補正後電力上限値として算出する補正後電力上限値算出処理と、要求電力をバッテリ電力上限値で制限した値を上限制限後要求電力として算出する上限制限後要求電力算出処理と、要求電力が補正後電力上限値より大きい場合に、実電力と上限制限後要求電力との差分に基づく上限PI補正量を補正後電力上限値に加算した電力を電力上限制限値として算出する電力上限制限値算出処理と、電力上限制限値とMG回転速度とに基づき、MG上限トルクを算出するMG上限トルク算出処理と、MG要求トルクをMG上限トルクで制限した値をMG指令トルクとして算出するMG指令トルク算出処理とを実行する。
【選択図】図2
特許請求の範囲
【請求項1】
走行用の駆動力の発生と、走行エネルギによる回生発電とが可能なモータと、
前記モータへの電力の供給と、前記モータが回生発電した電力の充電とを行うバッテリと、を備える車両に搭載され、
前記バッテリから前記モータへ供給する電力の電力供給量と、前記モータが発電する回生電力の回生発電量とを制御する制御部を有する車両用制御装置であって、
前記制御部は、
ドライバ要求トルクに基づいて前記モータに要求するモータ要求トルクと、前記モータのモータ回転速度とから、前記モータが前記モータ要求トルクを発生するために必要な電力である要求電力を算出する要求電力算出処理と、
前記バッテリのバッテリ電圧およびバッテリ電流から前記バッテリの実際の電力である実電力を算出する実電力算出処理と、
所定のバッテリ電力上限値から所定の補正量であるモータ損失上限補正値を減算した値を補正後電力上限値として算出する補正後電力上限値算出処理と、
前記要求電力を前記バッテリ電力上限値で制限した値を上限制限後要求電力として算出する上限制限後要求電力算出処理と、
前記要求電力が前記補正後電力上限値より大きい場合に、前記実電力と前記上限制限後要求電力との差分に基づき、フィードバック補正量である上限PI補正量を算出し、前記上限PI補正量を前記補正後電力上限値に加算した電力を電力上限制限値として算出する電力上限制限値算出処理と、
前記電力上限制限値と前記モータ回転速度とに基づき、前記モータのトルクの上限値であるモータ上限トルクを算出するモータ上限トルク算出処理と、
前記モータ要求トルクを前記モータ上限トルクで制限した値を、前記モータに指令するトルクであるモータ指令トルクとして算出するモータ指令トルク算出処理と、を実行することを特徴とする車両用制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記制御部は、前記要求電力が前記補正後電力上限値より大きい場合に、前記電力上限制限値を前記補正後電力上限値より小さくならないように制限することを特徴とする請求項1に記載の車両用制御装置。
【請求項3】
前記制御部は、前記要求電力が前記補正後電力上限値より大きい場合に、前記電力上限制限値を前記要求電力より大きくならないように制限することを特徴とする請求項1または請求項2に記載の車両用制御装置。
【請求項4】
走行用の駆動力の発生と、走行エネルギによる回生発電とが可能なモータと、
前記モータへの電力の供給と、前記モータが回生発電した電力の充電とを行うバッテリと、を備える車両に搭載され、
前記バッテリから前記モータへ供給する電力の電力供給量と、前記モータが発電する回生電力の回生発電量とを制御する制御部を有する車両用制御装置であって、
前記制御部は、
ドライバ要求トルクに基づいて前記モータに要求するモータ要求トルクと、前記モータのモータ回転速度とから、前記モータが前記モータ要求トルクを発生するために必要な電力である要求電力を算出する要求電力算出処理と、
前記バッテリのバッテリ電圧およびバッテリ電流から前記バッテリの実際の電力である実電力を算出する実電力算出処理と、
所定のバッテリ電力下限値に所定の補正量であるモータ損失下限補正値を加算した値を補正後電力下限値として算出する補正後電力下限値算出処理と、
前記要求電力を前記バッテリ電力下限値で制限した値を下限制限後要求電力として算出する下限制限後要求電力算出処理と、
前記要求電力が前記補正後電力下限値より小さい場合に、前記実電力と前記下限制限後要求電力との差分に基づき、フィードバック補正量である下限PI補正量を算出し、前記下限PI補正量を前記補正後電力下限値に加算した電力を電力下限制限値として算出する電力下限制限値算出処理と、
前記電力下限制限値と前記モータ回転速度とに基づき、前記モータのトルクの下限値であるモータ下限トルクを算出するモータ下限トルク算出処理と、
前記モータ要求トルクを前記モータ下限トルクで制限した値を、前記モータに指令するトルクであるモータ指令トルクとして算出するモータ指令トルク算出処理と、を実行することを特徴とする車両用制御装置。
【請求項5】
前記制御部は、前記要求電力が前記補正後電力下限値より小さい場合に、前記電力下限制限値を前記補正後電力下限値より大きくならないように制限することを特徴とする請求項4に記載の車両用制御装置。
【請求項6】
前記制御部は、前記要求電力が前記補正後電力下限値より小さい場合に、前記電力下限制限値を前記要求電力より小さくならないように制限することを特徴とする請求項4または請求項5に記載の車両用制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両用制御装置に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
特許文献1には、ハイブリッド車両においてバッテリが過充放電状態になるのを防止し、制限指令値が変化した時にも応答よく制御できるようにするため、モータの駆動を制御するモータ制御装置が、電力制限指令に基づき、バッテリの入出力電力をバッテリ電圧とバッテリ電流の乗算から求め、PI制御器と、マップまたはテーブルとを用いて、バッテリの入出力電力の上下限を制御する技術が記載されている。特許文献1において、モータ制御装置は、実際のバッテリ電力が一時的に制限電力値を超えることを防止するため、トルクマップから求まるマップトルク制限値に掛けるゲインKを1より小さくすることで、実際の電力が最大値を超えてから制限が始まるのではなく、制限電力値よりも低い値で制限が始まるようにしている。
【先行技術文献】
【特許文献】
【0003】
特開2008-42973号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術にあっては、バッテリ電力が制限値を超えないことを確実にするためには、ゲインKの値を消費電力のばらつきを考慮した値とする必要があるため、ゲインKの値を小さくせざるを得なくなり、その結果として過剰に制限した状態となってしまう。消費電力のばらつきの要因にはモータ等の個体差が含まれるが、他の要因も含まれる。例えば、モータの損失のうち、ステータコイルで生じる銅損(コイルの抵抗成分により発熱し失われる損失)は、ステータコイルの温度が高いほど抵抗値が高くなり、その結果として損失も増加する。このように、同一の個体、同一の回転速度、同一のトルクであっても、コイル温度のような動作状態によってもその効率(損失)は変化するため、様々な要因を考慮してゲインKの値を決定する必要がある。したがって、個体差に起因するばらつきを考慮してゲインKの値を小さくした場合、制限する必要がない場合でもモータのトルクを制限してしまうことになり、バッテリの性能を十分に使い切ることができないという問題があった。
【0005】
本発明は、上記のような事情に着目してなされたものであり、バッテリの実電力が制限値を超えることを確実に防止しつつ、バッテリの性能を十分に使い切ることができる車両用制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
本発明は、走行用の駆動力の発生と、走行エネルギによる回生発電とが可能なモータと、前記モータへの電力の供給と、前記モータが回生発電した電力の充電とを行うバッテリと、を備える車両に搭載され、前記バッテリから前記モータへ供給する電力の電力供給量と、前記モータが発電する回生電力の回生発電量とを制御する制御部を有する車両用制御装置であって、前記制御部は、ドライバ要求トルクに基づいて前記モータに要求するモータ要求トルクと、前記モータのモータ回転速度とから、前記モータが前記モータ要求トルクを発生するために必要な電力である要求電力を算出する要求電力算出処理と、前記バッテリのバッテリ電圧およびバッテリ電流から前記バッテリの実際の電力である実電力を算出する実電力算出処理と、所定のバッテリ電力上限値から所定の補正量であるモータ損失上限補正値を減算した値を補正後電力上限値として算出する補正後電力上限値算出処理と、前記要求電力を前記バッテリ電力上限値で制限した値を上限制限後要求電力として算出する上限制限後要求電力算出処理と、前記要求電力が前記補正後電力上限値より大きい場合に、前記実電力と前記上限制限後要求電力との差分に基づき、フィードバック補正量である上限PI補正量を算出し、前記上限PI補正量を前記補正後電力上限値に加算した電力を電力上限制限値として算出する電力上限制限値算出処理と、前記電力上限制限値と前記モータ回転速度とに基づき、前記モータのトルクの上限値であるモータ上限トルクを算出するモータ上限トルク算出処理と、前記モータ要求トルクを前記モータ上限トルクで制限した値を、前記モータに指令するトルクであるモータ指令トルクとして算出するモータ指令トルク算出処理と、を実行することを特徴とする。
【発明の効果】
【0007】
このように上記の本発明によれば、バッテリの実電力が制限値を超えることを確実に防止しつつ、バッテリの性能を十分に使い切ることができる車両用制御装置を提供することができる。
【図面の簡単な説明】
【0008】
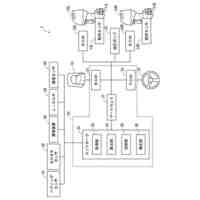
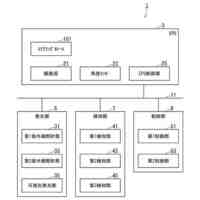
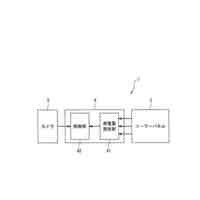
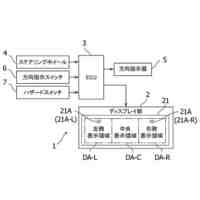
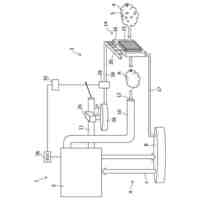
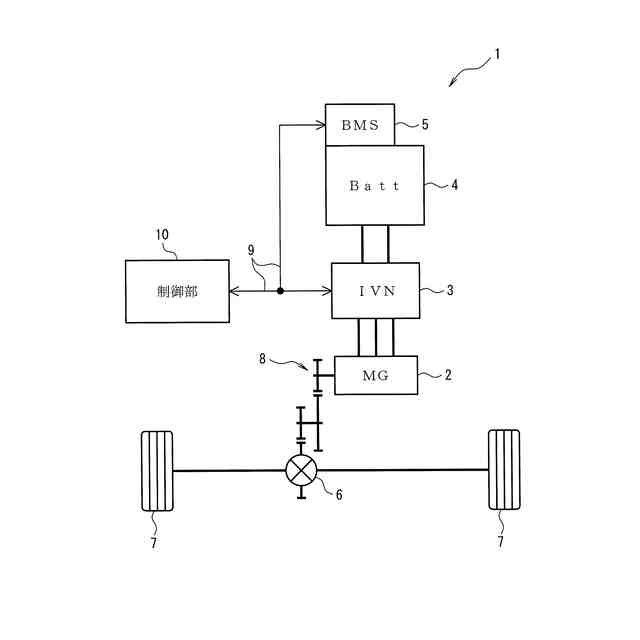
図1は、本発明の一実施例に係る車両用制御装置を備える車両の構成を示すブロック図である。
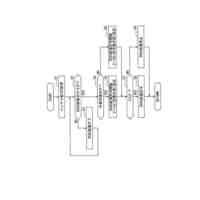
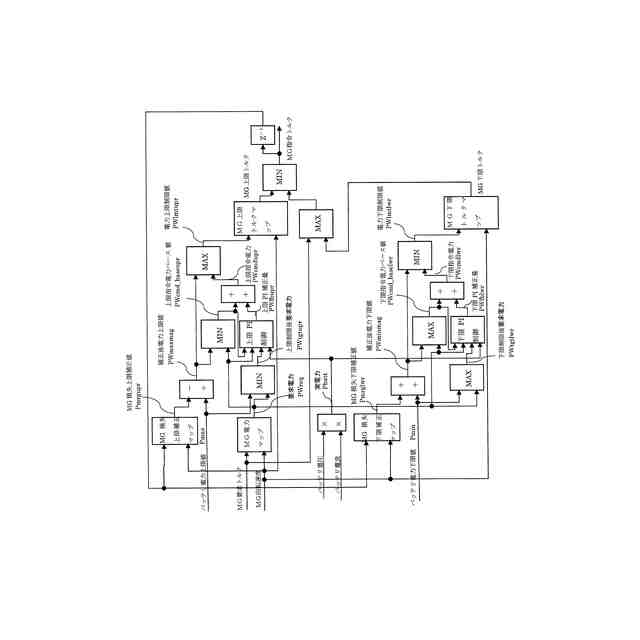
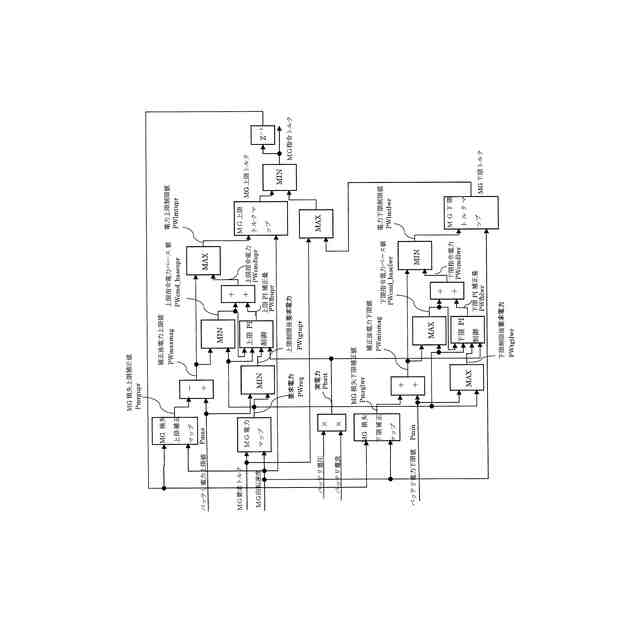
図2は、本発明の一実施例に係る車両用制御装置によるMGトルク制限制御を説明する制御ブロック図である。
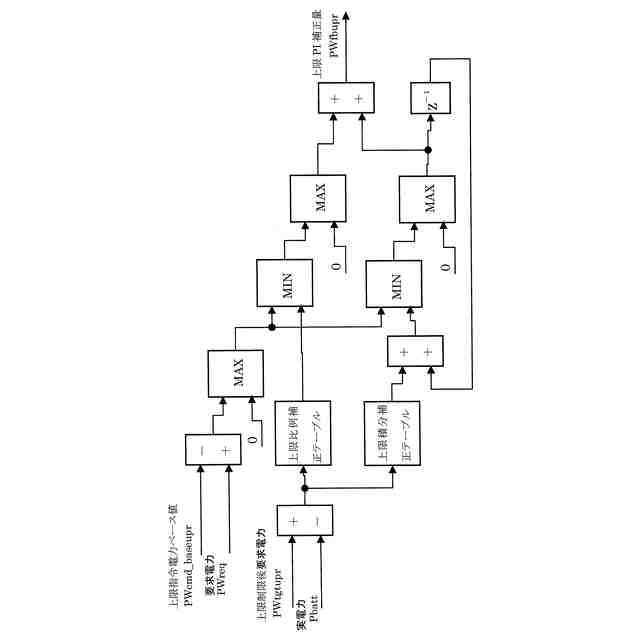
図3は、本発明の一実施例に係る車両用制御装置による上限PI制御を説明する制御ブロック図である。
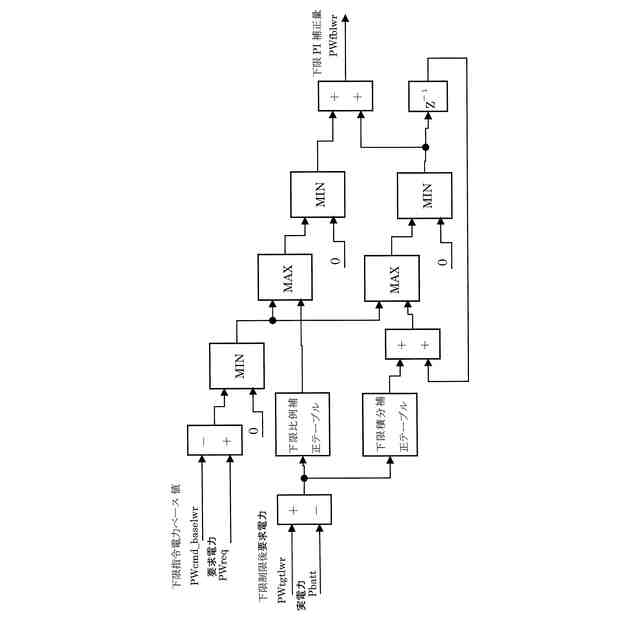
図4は、本発明の一実施例に係る車両用制御装置による下限PI制御を説明する制御ブロック図である。
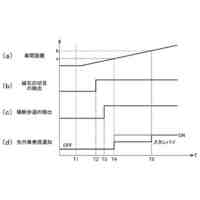
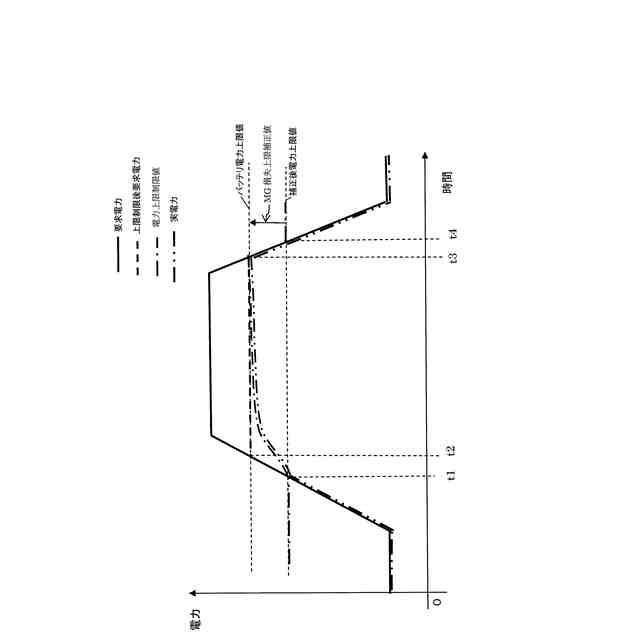
図5は、本発明の一実施例に係る車両用制御装置のMGトルク制限制御において、MG損失が想定された値とほぼ一致している場合の電力の推移を表すタイミングチャートである。
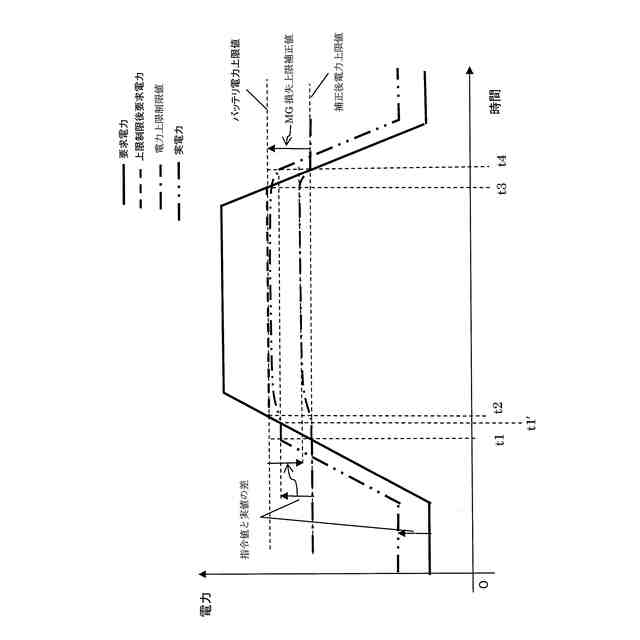
図6は、本発明の一実施例に係る車両用制御装置のMGトルク制限制御において、MG損失が想定された値より大きい場合の電力の推移を表すタイミングチャートである。
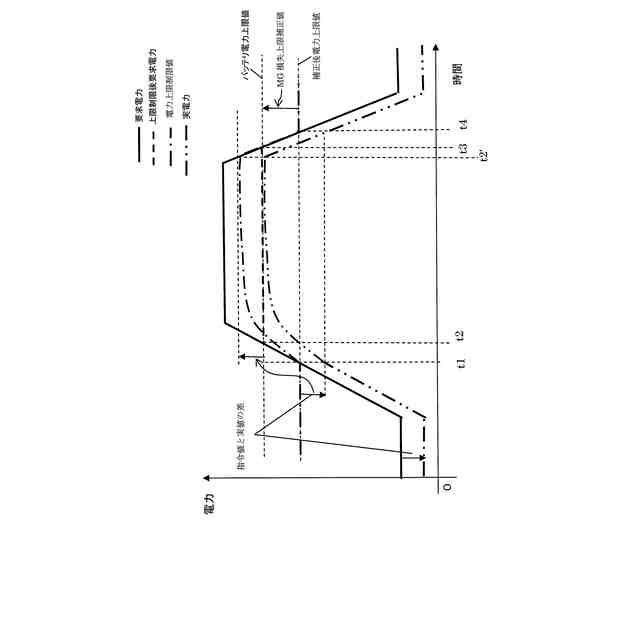
図7は、本発明の一実施例に係る車両用制御装置のMGトルク制限制御において、MG損失が想定された値より小さい場合の電力の推移を表すタイミングチャートである。
【発明を実施するための形態】
【0009】
本発明の一実施の形態に係る車両用制御装置は、走行用の駆動力の発生と、走行エネルギによる回生発電とが可能なモータと、モータへの電力の供給と、モータが回生発電した電力の充電とを行うバッテリと、を備える車両に搭載され、バッテリからモータへ供給する電力の電力供給量と、モータが発電する回生電力の回生発電量とを制御する制御部を有する車両用制御装置であって、制御部は、ドライバ要求トルクに基づいてモータに要求するモータ要求トルクと、モータのモータ回転速度とから、モータがモータ要求トルクを発生するために必要な電力である要求電力を算出する要求電力算出処理と、バッテリのバッテリ電圧およびバッテリ電流からバッテリの実際の電力である実電力を算出する実電力算出処理と、所定のバッテリ電力上限値から所定の補正量であるモータ損失上限補正値を減算した値を補正後電力上限値として算出する補正後電力上限値算出処理と、要求電力をバッテリ電力上限値で制限した値を上限制限後要求電力として算出する上限制限後要求電力算出処理と、要求電力が補正後電力上限値より大きい場合に、実電力と上限制限後要求電力との差分に基づき、フィードバック補正量である上限PI補正量を算出し、上限PI補正量を補正後電力上限値に加算した電力を電力上限制限値として算出する電力上限制限値算出処理と、電力上限制限値とモータ回転速度とに基づき、モータのトルクの上限値であるモータ上限トルクを算出するモータ上限トルク算出処理と、モータ要求トルクをモータ上限トルクで制限した値を、モータに指令するトルクであるモータ指令トルクとして算出するモータ指令トルク算出処理と、を実行することを特徴とする。これにより、本発明の一実施の形態に係る車両用制御装置は、バッテリの実電力が制限値を超えることを確実に防止しつつ、バッテリの性能を十分に使い切ることができる。
【実施例】
【0010】
以下、図面を参照して、本発明の実施例に係る車両用制御装置を搭載した車両について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
スズキ株式会社
溶接部材
12日前
スズキ株式会社
船舶推進機
26日前
スズキ株式会社
船舶推進機
26日前
スズキ株式会社
船舶推進機
26日前
スズキ株式会社
船舶推進機
26日前
スズキ株式会社
船舶推進機
26日前
スズキ株式会社
ダンパ装置
24日前
スズキ株式会社
船舶推進機
26日前
スズキ株式会社
燃料供給装置
16日前
スズキ株式会社
着桟支援装置
1か月前
スズキ株式会社
動力伝達装置
24日前
スズキ株式会社
車両浄化装置
1か月前
スズキ株式会社
車両浄化装置
1か月前
スズキ株式会社
車体下部構造
17日前
スズキ株式会社
車体下部構造
17日前
スズキ株式会社
車両用変速機
1か月前
スズキ株式会社
車体下部構造
17日前
スズキ株式会社
自動運転装置
4日前
スズキ株式会社
可変動弁装置
10日前
スズキ株式会社
車両用ドア構造
16日前
スズキ株式会社
車両用制御装置
4日前
スズキ株式会社
車両用制御装置
4日前
スズキ株式会社
車両の制御装置
26日前
スズキ株式会社
二輪車搭載装置
4日前
スズキ株式会社
車両の制御装置
1か月前
スズキ株式会社
車両用電源装置
13日前
スズキ株式会社
車両の報知装置
20日前
スズキ株式会社
車両の制御装置
1か月前
スズキ株式会社
車両の制御装置
1か月前
スズキ株式会社
車両用表示装置
11日前
スズキ株式会社
車両用シート構造
1か月前
スズキ株式会社
船舶推進システム
3日前
スズキ株式会社
燃料電池システム
13日前
スズキ株式会社
情報処理システム
1か月前
スズキ株式会社
情報処理システム
1か月前
スズキ株式会社
排気部材の支持構造
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ