TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025079013
公報種別
公開特許公報(A)
公開日
2025-05-21
出願番号
2023191399
出願日
2023-11-09
発明の名称
着桟支援装置
出願人
スズキ株式会社
代理人
個人
,
個人
,
個人
主分類
B63H
25/04 20060101AFI20250514BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】操船者の操船負担を低減可能な着桟支援装置を提供する。
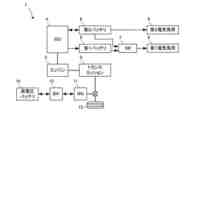
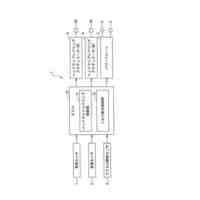
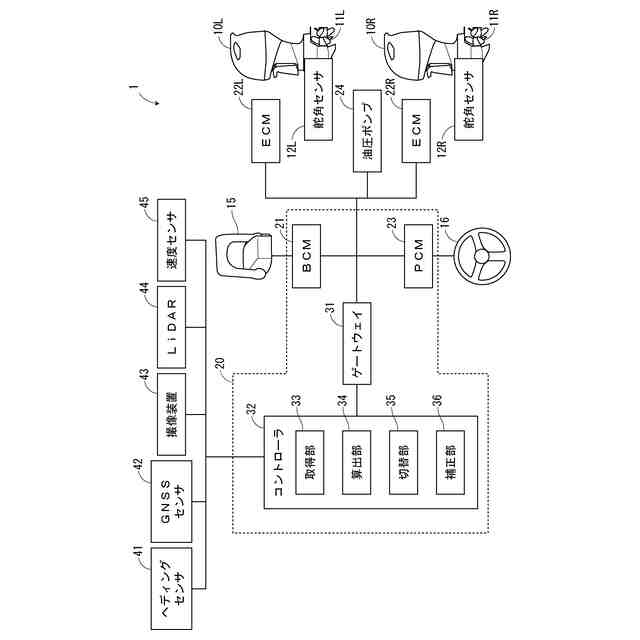
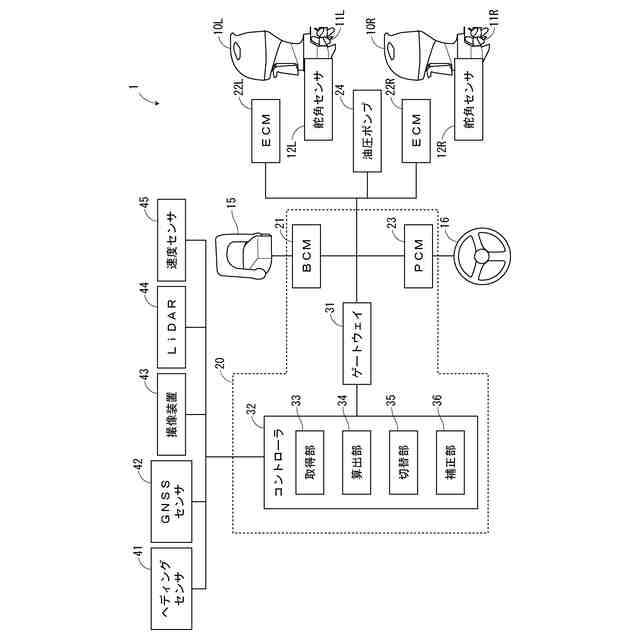
【解決手段】着桟支援装置(20)は、推進機(10L、10R)が取り付けられた船舶の着桟を支援する。着桟支援装置には、操作装置(15、16)からの操作量に基づいて前記推進機を制御する制御部(21、23)と、現在の船舶位置及び船首方向を含む船舶状態を取得する取得部(33)と、現在の船舶位置から着桟位置への着桟ルートを算出する算出部(34)と、船舶状態及び着桟ルートに基づいて前記推進機の制御を補正する補正部(36)と、を備えている。
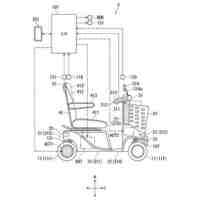
【選択図】図1
特許請求の範囲
【請求項1】
推進機が取り付けられた船舶の着桟を支援する着桟支援装置であって、
操作装置からの操作量に基づいて前記推進機を制御する制御部と、
現在の船舶位置及び船首方向を含む船舶状態を取得する取得部と、
現在の船舶位置から着桟位置への着桟ルートを算出する算出部と、
船舶状態及び着桟ルートに基づいて前記推進機の制御を補正する補正部と、を備えていることを特徴とする着桟支援装置。
続きを表示(約 1,100 文字)
【請求項2】
前記船舶には複数の推進機が取り付けられ、
船舶状態は現在の船速を含み、
前記補正部は、現在の船首方向と着桟ルートの目標方向の差分から目標旋回角を求め、現在の船速が所定船速以下であり、かつ目標旋回角が所定角以下である場合に、旋回方向内側の前記推進機の推力を低下させることを特徴とする請求項1に記載の着桟支援装置。
【請求項3】
前記船舶には複数の推進機が取り付けられ、
船舶状態は現在の船速を含み、
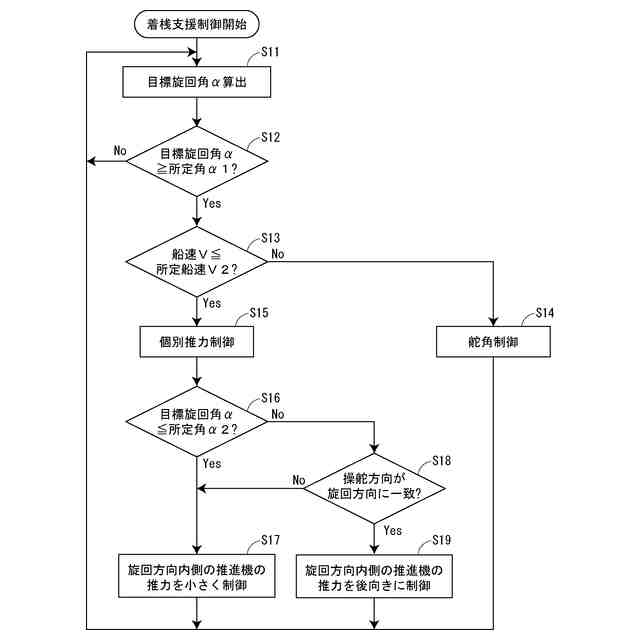
前記補正部は、現在の船首方向と着桟ルートの目標方向の差分から目標旋回角を求め、現在の船速が所定船速以下であり、目標旋回角が所定角よりも大きく、かつ操舵方向が目標の旋回方向と一致しない場合に、旋回方向内側の前記推進機の推力を低下させることを特徴とする請求項1又は請求項2に記載の着桟支援装置。
【請求項4】
船舶状態は現在の船速を含み、
前記補正部は、現在の船首方向と着桟ルートの目標方向の差分から目標旋回角を求め、現在の船速が所定船速よりも大きい場合に、目標旋回角が小さくなるように前記推進機を転舵させることを特徴とする請求項1又は請求項2に記載の着桟支援装置。
【請求項5】
前記船舶には複数の推進機が取り付けられ、
船舶状態は現在の船速を含み、
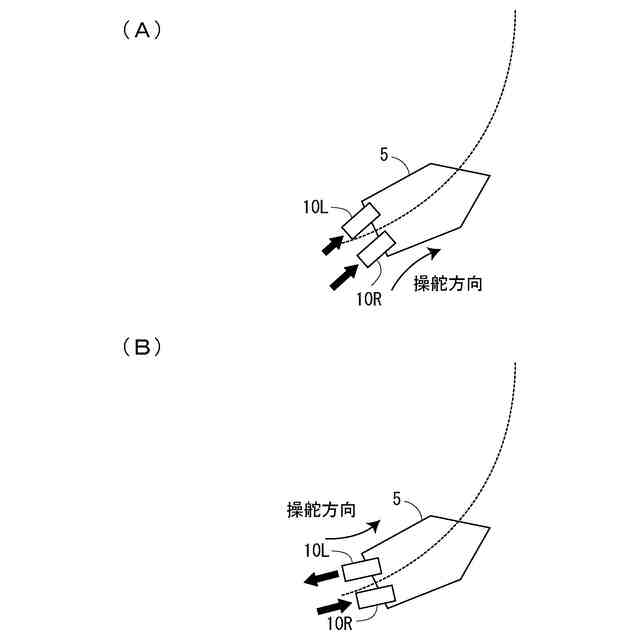
前記補正部は、現在の船首方向と着桟ルートの目標方向の差分から目標旋回角を求め、現在の船速が所定船速以下であり、目標旋回角が所定角よりも大きく、かつ操舵方向が目標の旋回方向と一致する場合に、旋回方向内側の前記推進機の推力を後方向に向けさせることを特徴とする請求項1又は請求項2に記載の着桟支援装置。
【請求項6】
船舶状態は現在の船速及び着桟位置までの所要距離を含み、
操船モードから着桟支援モードに切り替わった後に前記補正部に補正処理が実施され、
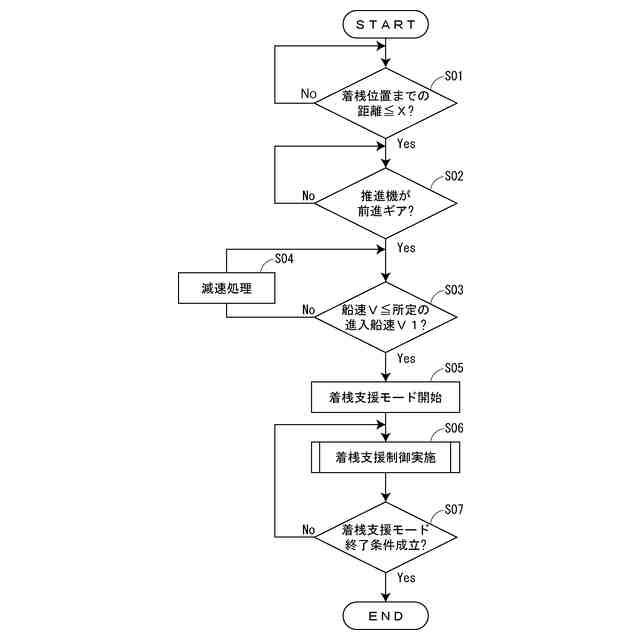
着桟位置までの距離が所定距離以下であり、前記船舶が前進ギアであり、かつ船速が所定の進入船速よりも大きい場合に、着桟支援モードに移行する前に前記船舶を減速させることを特徴とする請求項1又は請求項2に記載の着桟支援装置。
【請求項7】
操船モードから着桟支援モードに切り替わった後に前記補正部に補正処理が実施され、
着桟支援モードは、前記船舶が着桟位置に到達したこと、所定角以上に操舵されたこと、前記船舶が着桟ルートから離脱したこと、前記推進機が中立ギア又は後退ギアであることのいずれかを検出したときに終了することを特徴とする請求項1又は請求項2に記載の着桟支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、着桟支援装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
着桟ルートをモニターに写して船舶の操船を支援する着桟支援装置が開発されている(例えば、特許文献1参照)。特許文献1に記載の着桟支援装置には、入港時の操船記録が登録されたデータベースが設けられている。データベースの操船記録には過去の入港時の気象状態及び海象状態等が含まれており、現在の気象状態及び海象状態等に類似した操船記録がデータベースから検索される。そして、操船記録に基づいて船舶の現在位置から港の着桟位置までの着桟ルートが演算されて、着浅ルートや桟橋等がモニターに写されることで操船精度が向上して安全性が高められている。
【先行技術文献】
【特許文献】
【0003】
特許第4853946号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の着桟支援装置では、操船者の技量によって着桟ルートに沿って操船しなければならず、特に経験の浅い操船者には困難な操船になっていた。
【0005】
本発明はかかる点に鑑みてなされたものであり、操船者の操船負担を低減することができる着桟支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様の着桟支援装置は、推進機が取り付けられた船舶の着桟を支援する着桟支援装置であって、操作装置からの操作量に基づいて前記推進機を制御する制御部と、現在の船舶位置及び船首方向を含む船舶状態を取得する取得部と、現在の船舶位置から着桟位置への着桟ルートを算出する算出部と、船舶状態及び着桟ルートに基づいて前記推進機の制御を補正する補正部と、を備えていることで上記課題を解決する。
【発明の効果】
【0007】
本発明の一態様の着桟支援装置によれば、操作装置の操作によって着桟ルートから船舶が外れそうになると、船舶位置及び船首方向が着桟ルートに沿うように推進機の制御が補正される。よって、経験が浅い操船者によって操船されても、着桟ルートに沿って船舶が動かされて操船者の負担を軽減すると共に安定した着浅が可能になる。
【図面の簡単な説明】
【0008】
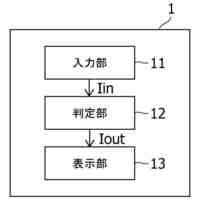
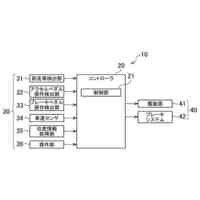
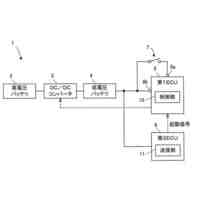
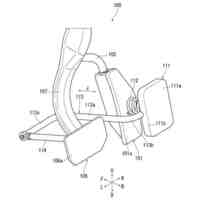
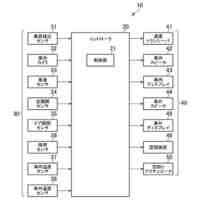
本実施例の操船システムの構成図である。
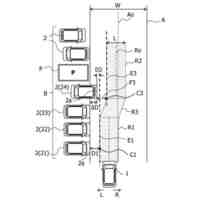
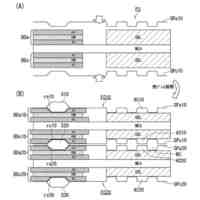
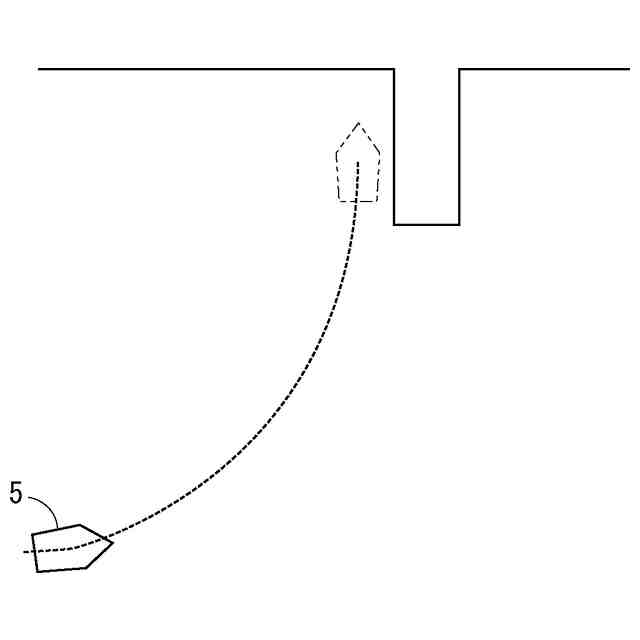
本実施例の着桟ルートの模式図である。
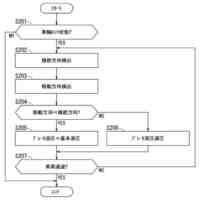
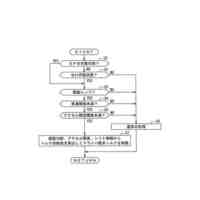
本実施例の着桟支援制御のフローチャートである。
本実施例の補正処理のフローチャートである。
本実施例の目標の旋回方向と推進機の舵角方向を示す図である。
【発明を実施するための形態】
【0009】
本発明の一態様の着桟支援装置は、推進機が取り付けられた船舶の着桟を支援する。現在の船舶位置及び船首方向を含む船舶状態が取得部に取得され、現在の船舶位置から着桟位置への着桟ルートが算出部に算出される。操作装置からの操作量に基づいて制御部に推進機が制御され、操作装置の操作によって着桟ルートから船舶が外れそうになると、船舶状態及び着桟ルートに基づいて着桟ルートに沿うように補正部に制御部の制御が補正される。よって、経験が浅い操船者によって操船されても、着桟ルートに沿って船舶が動かされて操船者の負担を軽減すると共に安定した着浅が可能になる。
【実施例】
【0010】
既存の着桟支援においては、一般的な舵角制御又はジョイスティック操船による推進機の個別制御によって船舶の進行方向が制御されている。一般的な舵角制御では、複数の推進機が共に同方向に転舵され、かつこれら複数の推進機がそれぞれ同じ推進力で制御されるため、低速時には推進機が転舵しても船舶の向きが変わり難くなると共に定位置で旋回することもできない。ジョイスティック操船では複数の推進機の転舵や推進機が個別に制御されて船舶が自在に動かされるが、システムが複雑になると共に高価になる。そこで、本実施例では、通常の船速では舵角制御によって船舶の向きが調整され、低速時には複数の推進機の個別推力制御に切り替えられて船舶の向きが調整されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
スズキ株式会社
開閉機構
2か月前
スズキ株式会社
内燃機関
1か月前
スズキ株式会社
蓄熱装置
1か月前
スズキ株式会社
電動車両
1か月前
スズキ株式会社
開閉機構
2か月前
スズキ株式会社
錆判定装置
2か月前
スズキ株式会社
移動システム
25日前
スズキ株式会社
エアクリーナ
20日前
スズキ株式会社
車体下部構造
20日前
スズキ株式会社
車体下部構造
20日前
スズキ株式会社
運転支援装置
13日前
スズキ株式会社
車両前部構造
19日前
スズキ株式会社
車両前部構造
1か月前
スズキ株式会社
小型電動車両
1か月前
スズキ株式会社
車両側部構造
5日前
スズキ株式会社
動力伝達装置
6日前
スズキ株式会社
運転支援装置
7日前
スズキ株式会社
車両用制御装置
17日前
スズキ株式会社
車両の制御装置
3日前
スズキ株式会社
車両用制御装置
1か月前
スズキ株式会社
車両用空調装置
10日前
スズキ株式会社
車両用制御装置
17日前
スズキ株式会社
車両用制御装置
11日前
スズキ株式会社
車両の制動装置
2か月前
スズキ株式会社
車両用制御装置
25日前
スズキ株式会社
駐車支援システム
6日前
スズキ株式会社
駐車支援システム
6日前
スズキ株式会社
車両制御システム
2か月前
スズキ株式会社
車両制御システム
2か月前
スズキ株式会社
車両用モータ構造
2か月前
スズキ株式会社
吸気マニホールド
24日前
スズキ株式会社
冷却水の排水構造
25日前
スズキ株式会社
車両用ペダル構造
24日前
スズキ株式会社
燃料電池スタック
10日前
スズキ株式会社
車両用乗員保護装置
3日前
スズキ株式会社
車両の発進制御装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ