TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025077436
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023189625
出願日
2023-11-06
発明の名称
車両の制御装置
出願人
スズキ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/14 20060101AFI20250512BHJP(車両一般)
要約
【課題】ACCの作動中に自車両の前方への他車両の割り込みが推測される状況において運転者が安心かつ快適に感じる走行制御を実現可能な車両の制御装置を提供する。
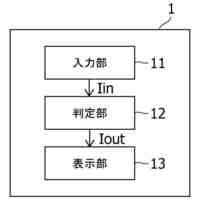
【解決手段】車両の制御装置1は、設定車速での定速走行、または設定車間時間を保ちながら先行車両に追従する追従走行を行うACCコントローラ30を含む。ACCコントローラ30は、自車両の前方への他車両の割り込みが推測されたとき、先行車両との設定車間時間Tpsが第1の閾値TH1以下である場合に、該設定車間時間Tpsを第1の閾値TH1よりも大きい第2の閾値TH2以上である設定車間時間Tps’に切り替える一方、先行車両との設定車間時間Tpsが第1の閾値TH1を超える場合に、該設定車間時間Tpsを維持する。
【選択図】図1
特許請求の範囲
【請求項1】
設定車速での定速走行、または設定車間時間を保ちながら先行車両に追従する追従走行を行うアダプティブクルーズコントロール手段と、
自車両の前方への他車両の割り込みを推測する割り込み推測手段と、を含む車両の制御装置であって、
前記アダプティブクルーズコントロール手段は、前記割り込み推測手段で他車両の割り込みが推測されたとき、前記先行車両との設定車間時間が第1の閾値以下である場合に、該設定車間時間を前記第1の閾値よりも大きい第2の閾値以上である設定車間時間に切り替える一方、前記先行車両との設定車間時間が前記第1の閾値を超える場合に、該設定車間時間を維持するように構成されていることを特徴とする車両の制御装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の車両の制御装置であって、
自車両の前方への他車両の割り込みを検知する割り込み検知手段を含み、
前記アダプティブクルーズコントロール手段は、前記割り込み検知手段で他車両の割り込みが検知されたとき、該他車両との実車間時間が前記先行車両との設定車間時間以下である場合に、該設定車間時間を前記第1の閾値以下である設定車間時間に切り替えるように構成されていることを特徴とする車両の制御装置。
【請求項3】
請求項1に記載の車両の制御装置であって、
前記アダプティブクルーズコントロール手段は、前記割り込み推測手段で他車両の割り込みが推測されたとき、自車両が減速中または減速を必要とする状態にあれば、前記先行車両との設定車間時間が前記第1の閾値以下であっても該設定車間時間を維持して、前記第2の閾値以上である設定車間時間への切り替えを中止するように構成されていることを特徴とする車両の制御装置。
【請求項4】
請求項1に記載の車両の制御装置であって、
前記アダプティブクルーズコントロール手段は、自車両が加速中または加速を必要とする状態にあるとき、前記割り込み推測手段で他車両の割り込みが推測されたときの自車両の加速度を、前記他車両の割り込みが推測されていないときの自車両の加速度よりも小さくするように構成されていることを特徴とする車両の制御装置。
【請求項5】
請求項2に記載の車両の制御装置であって、
前記アダプティブクルーズコントロール手段は、前記追従走行中に、前記割り込み検知手段で他車両の割り込みが検知されたとき、該他車両の速度が自車両の速度よりも速く、かつ、前記他車両との実車間時間が前記先行車両との設定車間時間を超える場合に、前記他車両の減速を検知するまでの間、または所定の車速維持時間が経過するまでの間、自車両の現在速度を維持するように構成されていることを特徴とする車両の制御装置。
【請求項6】
請求項2に記載の車両の制御装置であって、
前記アダプティブクルーズコントロール手段は、前記定速走行中に、前記割り込み検知手段で他車両の割り込みが検知されたとき、該他車両の速度が自車両の速度よりも速ければ、前記他車両との実車間時間が前記先行車両との設定車間時間以下であっても該設定車間時間を維持して前記第1の閾値以下である設定車間時間への切り替えを中止するように構成されていることを特徴とする車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
例えば、自動車等の車両の運転者を支援する機能の一つとして、アダプティブクルーズコントロール(Adaptive Cruise Control:ACC)が知られている。ACCは、設定車速での定速走行、または設定車間時間を保ちながら先行車両に追従する追従走行を行うことによって、運転者によるアクセルやブレーキの操作を支援する。なお、車間時間は、先行車両との車間距離を自車両の速度で除算した値であり、自車両が先行車の現在位置に到達するまでの時間を示している。
【0003】
ACCに関する従来技術として、例えば特許文献1には、ACCの作動中に、自車両と先行車両との車間に対象車両が割り込んでくる可能性がある警戒状況を検出して、先行車両との車間距離を変更するようにした運転制御装置が開示されている。この運転制御装置では、警戒状況において、車間距離を短縮することで対象車両の割り込みをさせ難くしたり、逆に、車間距離を延長することで対象車両に割り込まれても構わないように予め備えたりすることによって、ACCの安全性の向上が図られている。車間距離を短縮するか延長するかの変更態様は、運転者の性格(好み)に応じて事前に選択可能とされている。
【先行技術文献】
【特許文献】
【0004】
特開2019-43551号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のようなACCの作動中における警戒状況、すなわち、自車両の前方への他車両の割り込みが推測される状況においては、自車両の運転者が安心かつ快適に感じる走行制御の実現が望まれる。上記従来技術では、対象車両の割り込みの可能性を検出して先行車両との車間距離を短縮することで対象車両の割り込みをさせ難くすることが提案されているが、対象車両が自車両の前方へ強引に割り込んでくる可能性は残るため、運転者が安心できるとは限らない。この点を考慮すると、先行車両との車間距離を延長することで対象車両に割り込まれても構わないように予め備えるようにすることは、運転者が安心かつ快適に感じる走行制御の実現に有効である。
【0006】
一般的にACCにおける先行車両の追従走行では、先行車両との車間距離または車間時間が、交通状況や運転者の好み等に合わせて段階的に設定可能になっていることが多い。このように先行車両との車間距離または車間時間が段階的に設定されているACCにおいて、上記従来技術のように対象車両の割り込みの可能性を検出して先行車両との車間距離を延長するようにした場合、割り込みの可能性を検出する前の先行車両との車間距離の設定によっては、延長後の車間距離が必要以上に確保される可能性がある。先行車両との車間距離が必要以上に確保されている状況では、運転者が先行車両との車間距離に危険を感じていないにも関わらず、延長後の車間距離を保つために少し強めのブレーキが掛かってしまうことで運転者を不快にさせる虞があり、改善の余地があった。
【0007】
本発明は上記の点に着目してなされたもので、ACCの作動中に自車両の前方への他車両の割り込みが推測される状況において運転者が安心かつ快適に感じる走行制御を実現可能な車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の目的を達成するため本発明の一態様は、設定車速での定速走行、または設定車間時間を保ちながら先行車両に追従する追従走行を行うアダプティブクルーズコントロール手段と、自車両の前方への他車両の割り込みを推測する割り込み推測手段と、を含む車両の制御装置を提供する。この車両の制御装置における前記アダプティブクルーズコントロール手段は、前記割り込み推測手段で他車両の割り込みが推測されたとき、前記先行車両との設定車間時間が第1の閾値以下である場合に、該設定車間時間を前記第1の閾値よりも大きい第2の閾値以上である設定車間時間に切り替える一方、前記先行車両との設定車間時間が前記第1の閾値を超える場合に、該設定車間時間を維持するように構成されている。
【発明の効果】
【0009】
本発明に係る車両の制御装置によれば、ACCの作動中に自車両の前方への他車両の割り込みが推測される状況において、先行車両との設定車間時間を延長することで他車両に割り込みをさせやすくできるとともに、先行車両との設定車間時間が必要以上に延長されるのを回避することができるため、自車両の運転者が安心かつ快適に感じる走行制御を実現することが可能になる。
【図面の簡単な説明】
【0010】
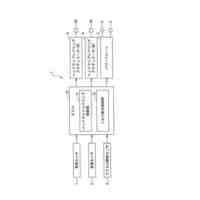
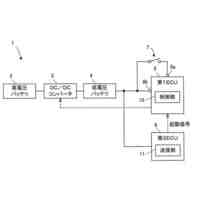
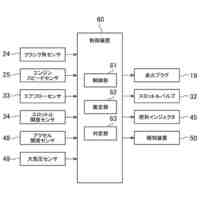
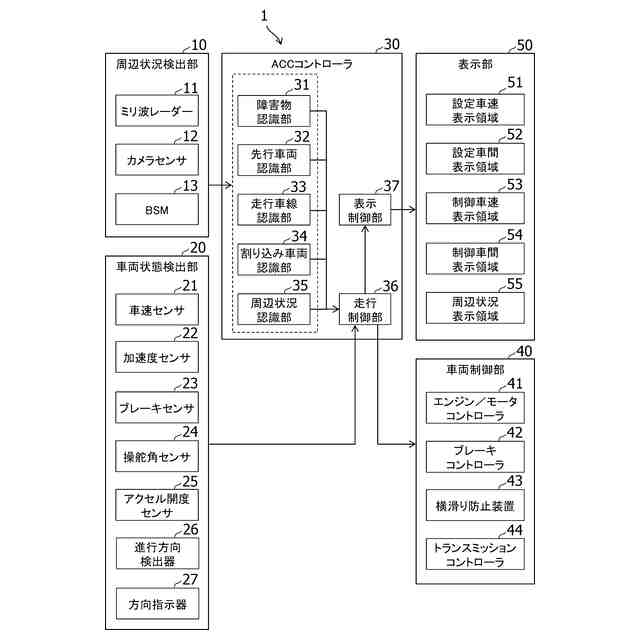
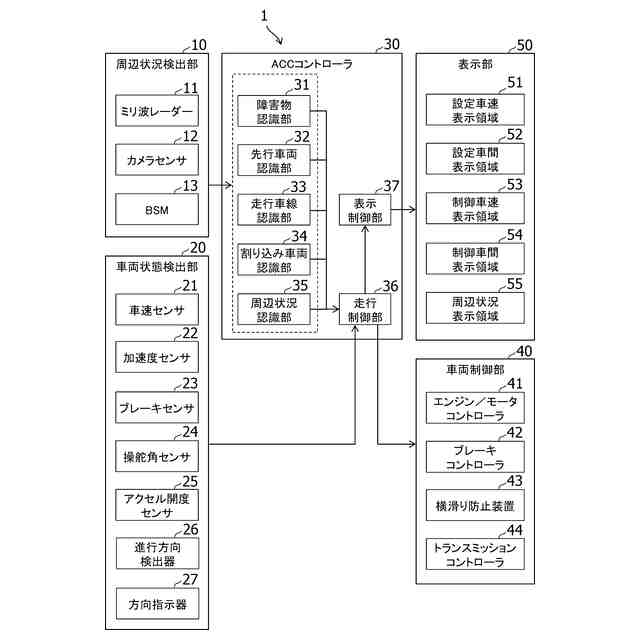
本発明の一実施形態に係る車両の制御装置の構成例を示すブロック図である。
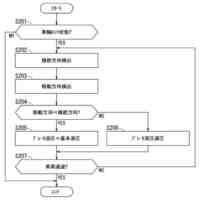
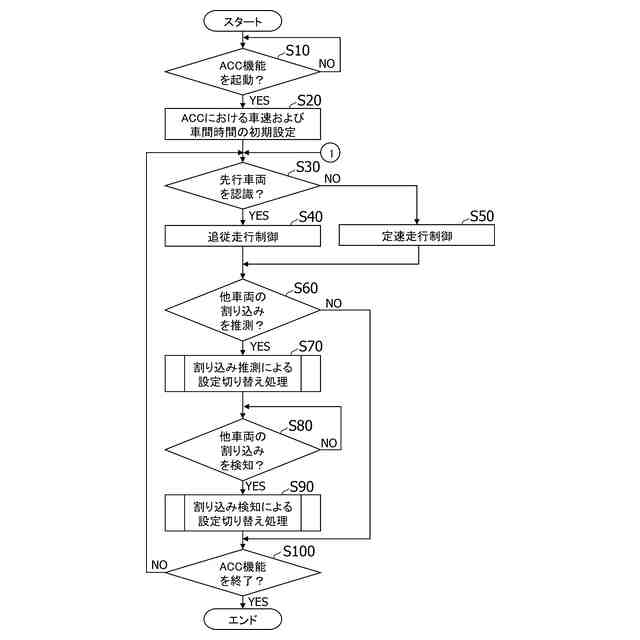
上記実施形態におけるACCによる走行制御の流れを示すフローチャートである。
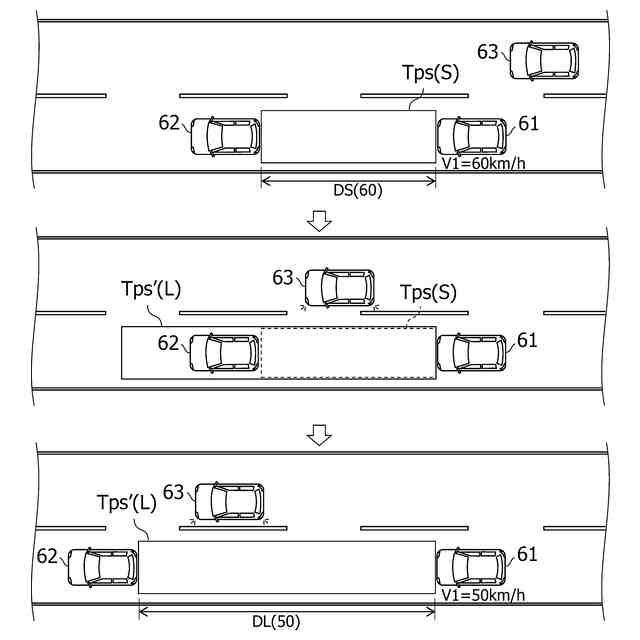
上記実施形態において初期の設定車間時間が「短」の場合に他車両の割り込みを推測したときの設定車間時間の切り替えを説明するための図である。
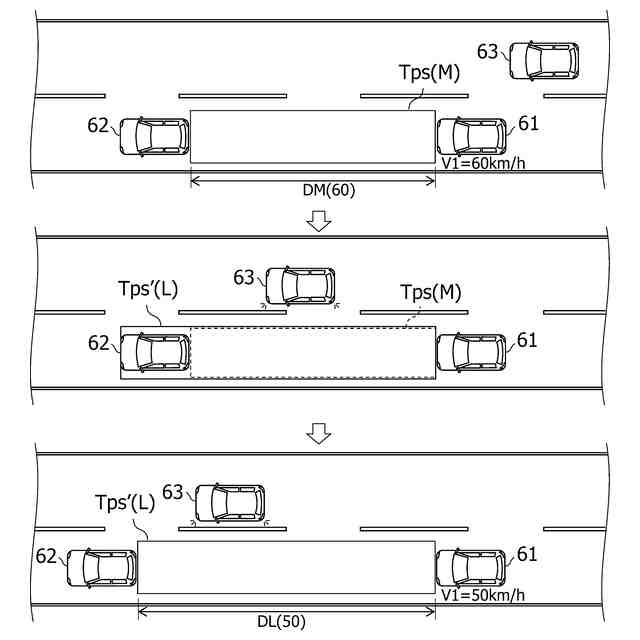
上記実施形態において初期の設定車間時間が「中」の場合に他車両の割り込みを推測したときの設定車間時間の切り替えを説明するための図である。
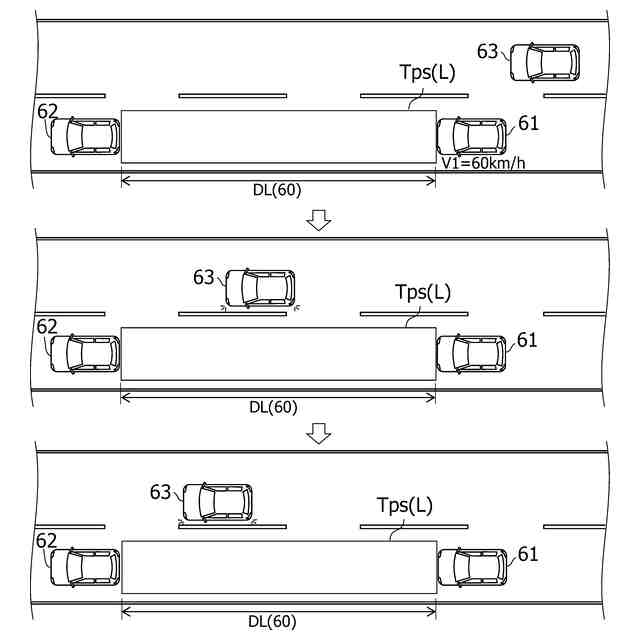
上記実施形態において初期の設定車間時間が「長」の場合に他車両の割り込みを推測したときの設定車間時間の切り替えを説明するための図である。
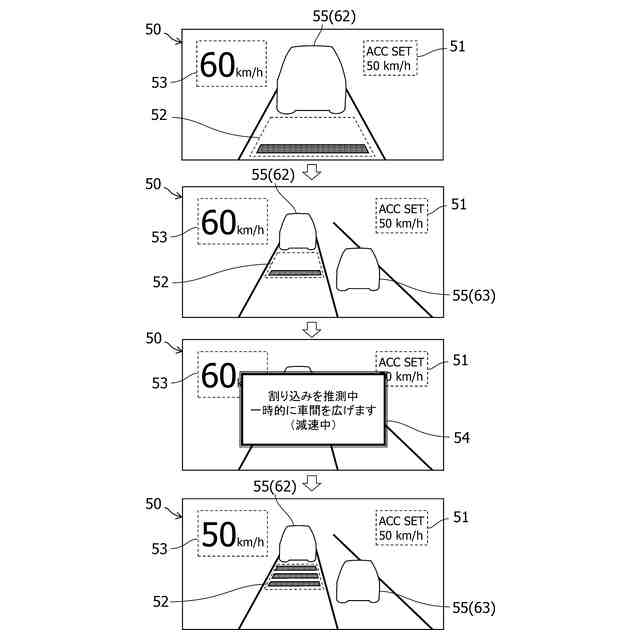
図3の切り替えに対応して表示部に表示される情報の一例を示す図である。
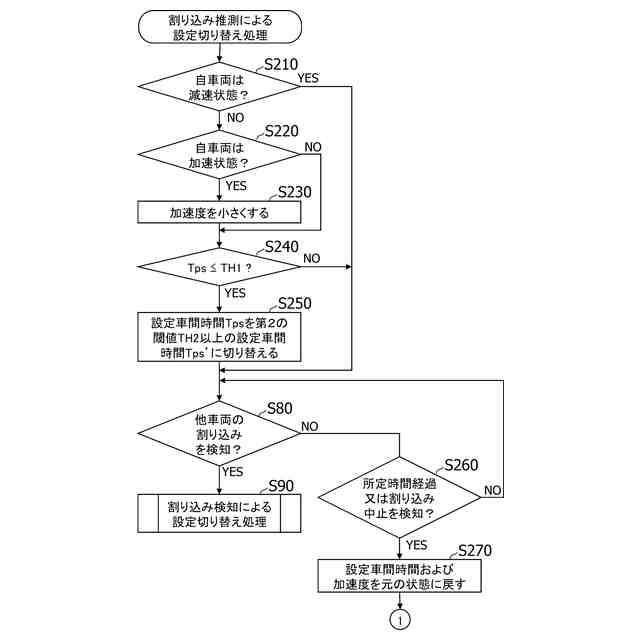
図2における割り込み推測による設定切り替え処理の具体的な一例を示すフローチャートである。
上記実施形態において先行車両の追従走行中に他車両の割り込みを検知したときの先行車両との設定車間時間の切り替えを説明するための図である。
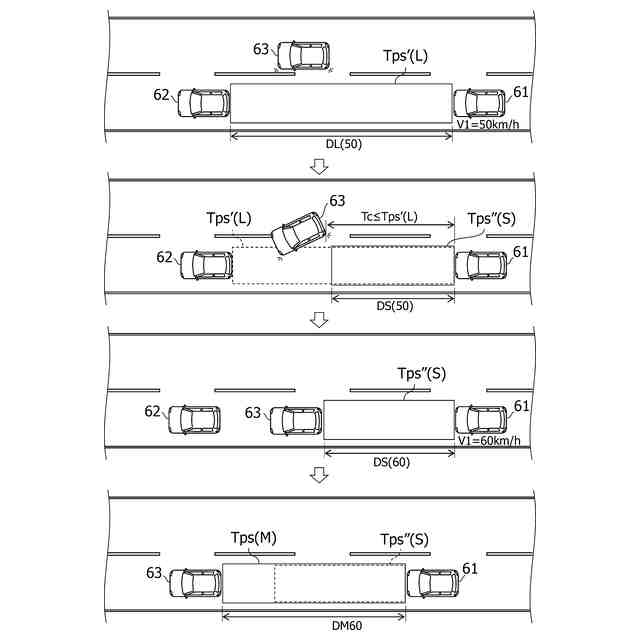
上記実施形態において先行車両の追従走行中に他車両の割り込みを検知したときの自車両の速度制御を説明するための図である。
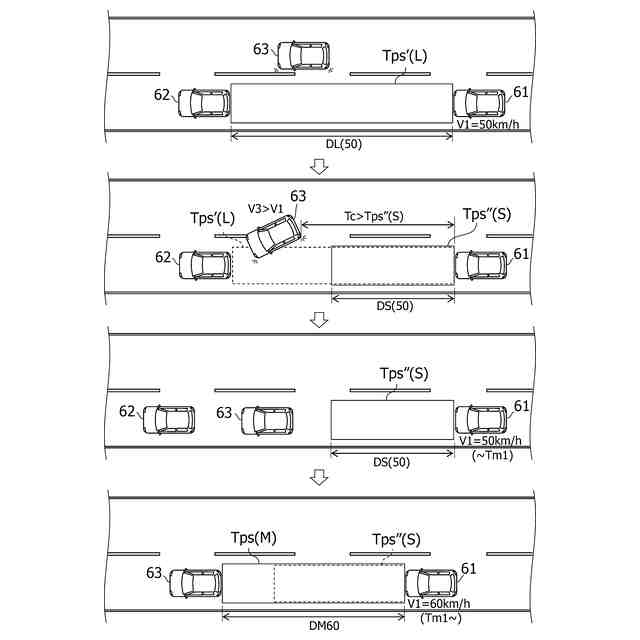
上記実施形態において先行車両の追従走行中に他車両の割り込みを検知したときの自車両の速度制御を説明するための別の図である。
上記実施形態において設定車速での定速走行中に他車両の割り込みを検知したときの自車両の速度制御を説明するための図である。
図2および図7における割り込み検知による設定切り替え処理の具体的な一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
スズキ株式会社
電動車両
今日
スズキ株式会社
開閉機構
26日前
スズキ株式会社
蓄熱装置
4日前
スズキ株式会社
開閉機構
26日前
スズキ株式会社
錆判定装置
1か月前
スズキ株式会社
車両前部構造
6日前
スズキ株式会社
車両用制御装置
6日前
スズキ株式会社
車両の制動装置
25日前
スズキ株式会社
車両用モータ構造
1か月前
スズキ株式会社
車両制御システム
28日前
スズキ株式会社
車両制御システム
27日前
スズキ株式会社
車両の車体側部構造
28日前
スズキ株式会社
内燃機関の制御装置
4日前
スズキ株式会社
内燃機関の還流装置
1か月前
スズキ株式会社
電動車両の前部構造
1か月前
スズキ株式会社
内燃機関の排気管構造
6日前
スズキ株式会社
内燃機関の気体分離装置
1か月前
スズキ株式会社
燃料電池スタックケース
1か月前
スズキ株式会社
ハイブリッド車両の制御装置
25日前
スズキ株式会社
充電用インレットの車体固定構造
28日前
スズキ株式会社
内燃機関の排気浄化装置の制御装置
1か月前
スズキ株式会社
燃料蒸気処理装置及び部品ユニット
1か月前
スズキ株式会社
燃料電池スタックのセル電圧測定用端子構造
今日
スズキ株式会社
対価支払いシステム、対価支払い通知装置および対価支払い方法
21日前
スズキ株式会社
船舶推進機の冷却装置
27日前
スズキ株式会社
船舶推進機の冷却装置
1か月前
テイ・エス テック株式会社
乗物用シート
1か月前
個人
飛行自動車
5か月前
個人
カーテント
1か月前
個人
警告装置
3か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
3か月前
個人
ホイルのボルト締結
27日前
日本精機株式会社
ケース
3か月前
個人
車輪清掃装置
1か月前
井関農機株式会社
作業車両
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ