TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025067946
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2025020620,2021573027
出願日
2025-02-12,2020-12-23
発明の名称
操船支援装置及び操船支援方法
出願人
古野電気株式会社
代理人
個人
,
個人
主分類
B63B
43/18 20060101AFI20250417BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】操船者の操船感覚にマッチした衝突危険ゾーンを小さい計算負荷で表示させることが可能な操船支援装置を提供する。
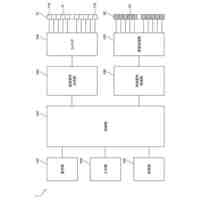
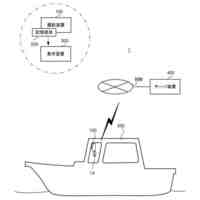
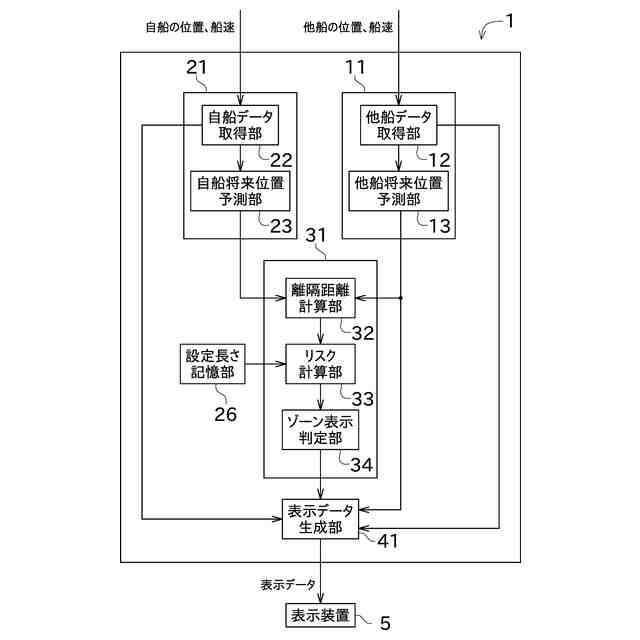
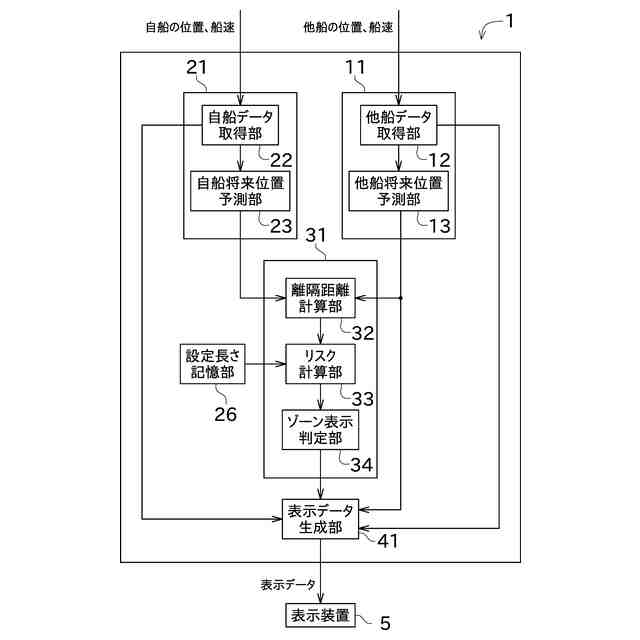
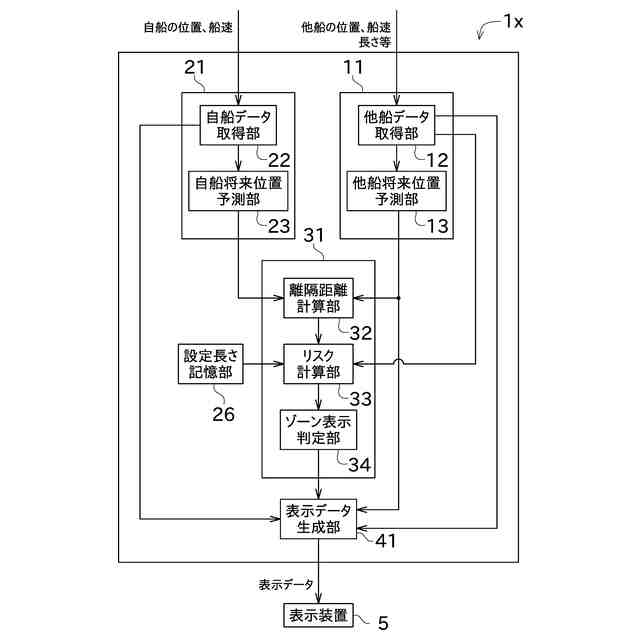
【解決手段】操船支援装置1は、リスク計算部33と、表示データ生成部41と、を備える。リスク計算部33は、自船及び他船のうち少なくとも一方の物理的な大きさを考慮して、将来の複数の時刻で予測された他船の位置と、対応して予測された自船の位置と、の間の離隔距離に基づいて、自船と他船との衝突が将来的に発生する可能性が高いゾーンである衝突危険ゾーンを表示するか否かを判断するための衝突リスク値を計算する。表示データ生成部41は、衝突リスク値を用いた判断に基づいて、予測された他船の位置に衝突危険ゾーンを表示するための表示データを生成する。
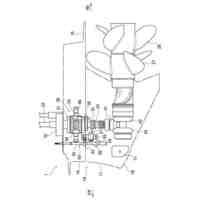
【選択図】図1
特許請求の範囲
【請求項1】
他船の位置及び速度に関する情報を取得する他船データ取得部と、
前記他船データ取得部が取得した他船の位置及び速度に基づいて、当該他船が同じ針路で、かつ同じ船速で航行を継続した場合に、将来の複数の時刻における他船の位置を予測する他船将来位置予測部と、
自船の位置及び速度に関する情報を取得する自船データ取得部と、
前記自船データ取得部が取得した自船の位置及び速度に基づいて、自船が当該位置で任意に定めた針路で、かつ同じ船速で航行を継続した場合に、前記他船将来位置予測部によって予測された前記他船の位置と対応する自船の位置を予測する自船将来位置予測部と、
それぞれの前記時刻で予測された前記他船の位置と、当該時刻において複数予測される前記自船の位置のうち、当該時刻における前記他船の位置に最も近くなる自船の位置と、の間の離隔距離に基づいて、自船と前記他船との衝突が将来的に発生する可能性が高いゾーンである衝突危険ゾーンを表示するか否かを判断するための衝突リスク値を計算するリスク計算部と、
前記衝突リスク値を用いた判断に基づいて、予測された前記他船の位置に前記衝突危険ゾーンを表示するための表示データを生成する表示データ生成部と、
を備え、
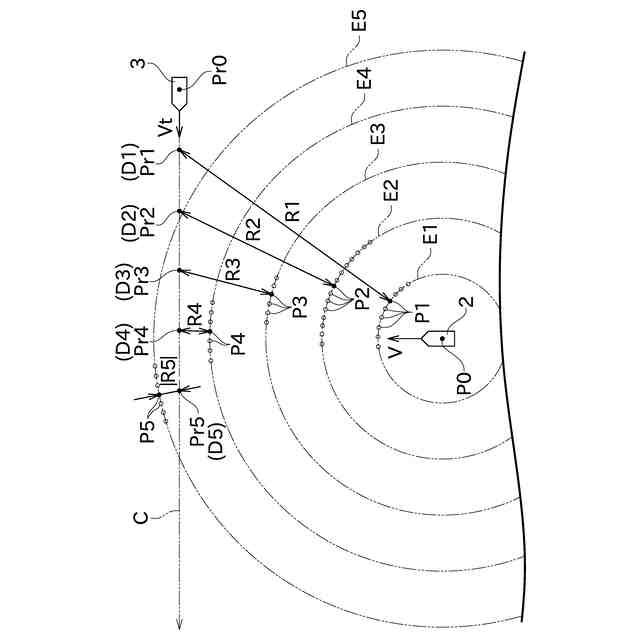
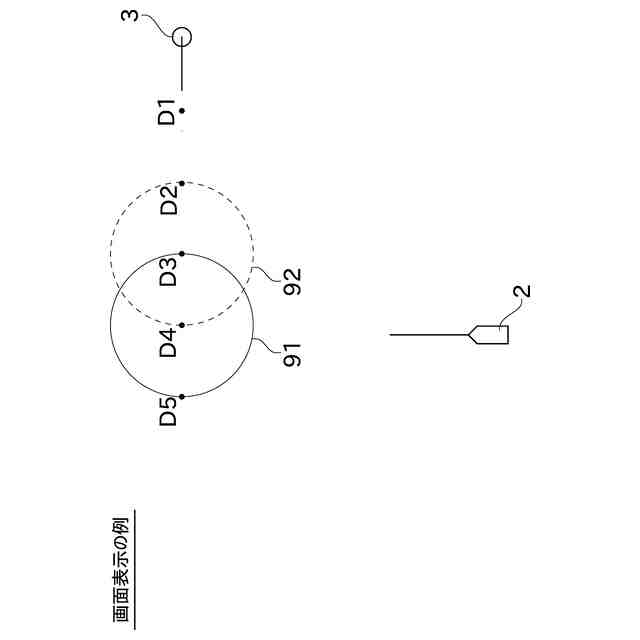
前記離隔距離は、それぞれの前記時刻で予測された前記他船の位置と、中心が現在時刻の自船位置で半径がそれぞれの前記時刻に対応した同心円の位置と、の間の距離として計算される、
ことを特徴とする操船支援装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の操船支援装置であって、
前記リスク計算部は、前記衝突リスク値を、自船及び前記他船のうち少なくとも一方の物理的な大きさを考慮して計算することを特徴とする操船支援装置。
【請求項3】
請求項1又は2に記載の操船支援装置であって、
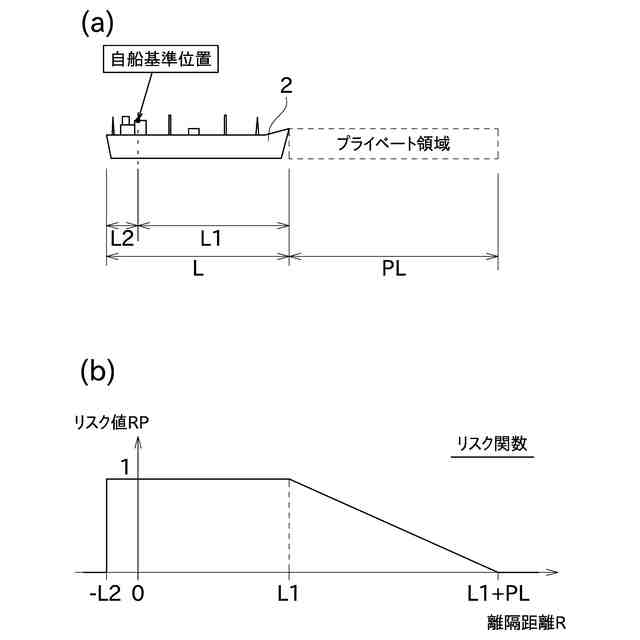
前記リスク計算部は、自船の物理的な大きさと、自船の前側及び/又は後側に設定することができる警戒領域の大きさと、を考慮して、前記離隔距離に基づいて、前記警戒領域に他船が将来的に侵入する可能性が高いゾーンである警戒ゾーンを表示するか否かを判断するための警戒リスク値を計算可能であり、
前記表示データ生成部は、前記警戒リスク値を用いた判断に基づいて、前記警戒ゾーンを、予測された前記他船の位置に前記衝突危険ゾーンと区別可能に表示するための表示データを生成可能であることを特徴とする操船支援装置。
【請求項4】
請求項3に記載の操船支援装置であって、
前記表示データ生成部は、前記警戒リスク値が所定の閾値以上である場合に、前記警戒ゾーンを表示するための表示データを生成することを特徴とする操船支援装置。
【請求項5】
請求項3又は4に記載の操船支援装置であって、
前記表示データに基づいて表示される前記衝突危険ゾーンと前記警戒ゾーンは、少なくとも色彩が互いに異なることを特徴とする操船支援装置。
【請求項6】
請求項3から5までの何れか一項に記載の操船支援装置であって、
前記警戒領域の大きさは、自船の船速によって変化することを特徴とする操船支援装置。
【請求項7】
他船の位置及び速度に関する情報を取得し、
取得した他船の位置及び速度に基づいて、当該他船が同じ針路で、かつ同じ船速で航行を継続した場合に、将来の複数の時刻における他船の位置を予測し、
自船の位置及び速度に関する情報を取得し、
取得した自船の位置及び速度に基づいて、自船が当該位置で任意に定めた針路で、かつ同じ船速で航行を継続した場合に、予測された前記他船の位置と対応する自船の位置を予測し、
それぞれの前記時刻で予測された前記他船の位置と、当該時刻において複数予測される前記自船の位置のうち、当該時刻における前記他船の位置に最も近くなる自船の位置と、の間の離隔距離に基づいて、自船と前記他船との衝突が将来的に発生する可能性が高いゾーンである衝突危険ゾーンを表示するか否かを判断するための衝突リスク値を計算し、
前記衝突リスク値を用いた判断に基づいて、予測された前記他船の位置に前記衝突危険ゾーンを表示するための表示データを生成する、
操船支援方法において、
前記離隔距離は、それぞれの前記時刻で予測された前記他船の位置と、中心が現在時刻の自船位置で半径がそれぞれの前記時刻に対応した同心円の位置と、の間の距離として計算される、
操船支援方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操船支援装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、自船及び他船の航行情報を利用して、自他船の衝突が将来的に発生するゾーンを計算することができる操船支援装置が知られている。非特許文献1は、この種の操船支援装置による当該ゾーンの計算手法を開示する。
【0003】
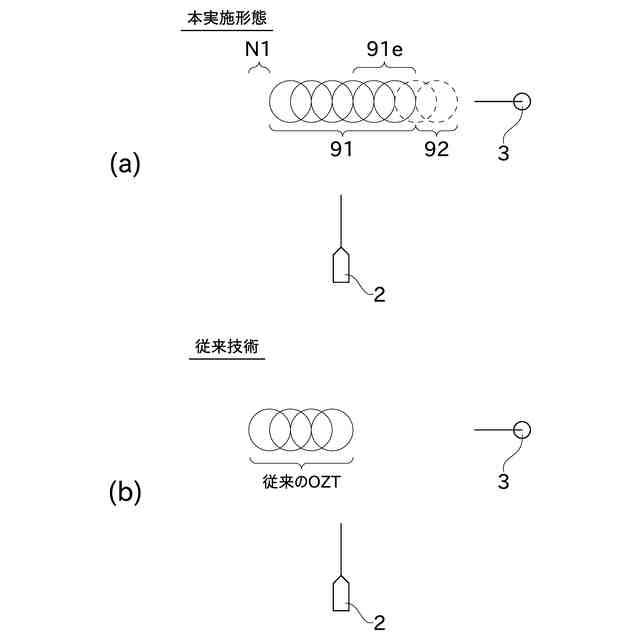
非特許文献1は、自船行動空間の中で相手船の存在とその運動により妨げられる空間であるOZT(Obstacle Zоne by Target)を計算する手法を開示する。非特許文献1によるOZTの計算手法は、以下のとおりである。即ち、自他船に発生する速力誤差を考慮して、任意のポイントに自他船が到達する時間を確率的に示した到達時間確率分布を定義することにより、任意のポイントにおける自他船の同時存在確率を求める。この同時存在確率が所定の確率値よりも高い場所を、衝突の可能性があるOZTとする。
【先行技術文献】
【非特許文献】
【0004】
今津隼馬・福戸淳司・沼野正義:相手船による妨害ゾーンとその表示について,日本航海学会論文集,vоl.107,pp.191-197,2002.9.
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記非特許文献1の手法では、自船及び他船を点とみなしてOZTを計算しており、自船及び他船の実際の大きさを考慮していない。これにより、表示上ではOZTを回避するように操船者が操船しても、自船及び他船が物理的な大きさを現実に有していることにより、船舶同士の異常接近又は衝突が生じるおそれがある。
【0006】
また、非特許文献1のように自他船の同時存在確率を求めることによりOZTを得る手法は、計算量が極めて大きくなる。従って、非特許文献1の手法では、OZT計算点を増加させることが計算負荷の観点から難しく、OZTの表示の空間的分解能を向上させることが困難になっていた。
【0007】
本発明は以上の事情に鑑みてされたものであり、その目的は、衝突の危険性を精度良く示す表示データを生成することができ、且つ、表示データ生成の計算負荷の軽減が図られた操船支援装置を提供することにある。
【発明の概要】
課題を解決するための手段及び効果
【0008】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0009】
本発明の観点によれば、以下の構成の操船支援装置が提供される。即ち、この操船支援装置は、他船データ取得部と、他船将来位置予測部と、自船データ取得部と、自船将来位置予測部と、リスク計算部と、表示データ生成部と、を備える。前記他船データ取得部は、他船の位置及び速度に関する情報を取得する。前記他船将来位置予測部は、前記他船データ取得部が取得した他船の位置及び速度に基づいて、当該他船が同じ針路で、かつ同じ船速で航行を継続した場合に、将来の複数の時刻における他船の位置を予測する。前記自船データ取得部は、自船の位置及び速度に関する情報を取得する。前記自船将来位置予測部は、前記自船データ取得部が取得した自船の位置及び速度に基づいて、自船が当該位置で任意に定めた針路で、かつ同じ船速で航行を継続した場合に、前記他船将来位置予測部によって予測された前記他船の位置と対応する自船の位置を予測する。前記リスク計算部は、それぞれの前記時刻で予測された前記他船の位置と、対応して予測された自船の位置と、の間の離隔距離に基づいて、自船と前記他船との衝突が将来的に発生する可能性が高いゾーンである衝突危険ゾーンを表示するか否かを判断するための衝突リスク値を計算する。対応して予測された自船の位置は、当該時刻において複数予測される前記自船の位置のうち、当該時刻における前記他船の位置に最も近くなる自船の位置である。前記表示データ生成部は、前記衝突リスク値を用いた判断に基づいて、予測された前記他船の位置に前記衝突危険ゾーンを表示するための表示データを生成する。
【0010】
これにより、自船と他船の離隔距離を利用して、自船と他船の衝突が将来的に発生するゾーンを表示する表示データを生成することができる。従って、妥当性が高く、操船者の実際の操船感覚にマッチしたゾーンを表示させることができる。また、速力誤差の発生を考慮した自他船の同時存在確率を計算するのではなく、自船と他船の離隔距離を基準として、衝突リスク値を計算することができる。また、離隔距離は現在時刻の自船を中心とする同心円と他船の位置により計算することができる。従って、計算負荷を低減することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
古野電気株式会社
物標検出装置、物標検出方法およびプログラム
6日前
古野電気株式会社
船舶追跡装置、船舶自動操船システム、船舶追跡方法、船舶追跡プログラム
20日前
個人
川下り用船
6か月前
個人
シーアンカー
8か月前
個人
発電船
7か月前
個人
船用横揺防止具
3か月前
個人
補助機構
2か月前
個人
コンパクトシティ船
2か月前
小柳建設株式会社
台船
9か月前
個人
渦流動力推進構造
2か月前
ウラカミ合同会社
曳航ロボット
10か月前
炎重工株式会社
浮標
4か月前
炎重工株式会社
浮標
4か月前
個人
水陸両用移動装置
9か月前
炎重工株式会社
移動体
7か月前
個人
船舶
4か月前
株式会社フルトン
水中捕捉装置
2か月前
個人
スクリュープロペラ
2か月前
ダイハツ工業株式会社
ジャケット
11か月前
オーケー工業株式会社
係留フック
3か月前
個人
回転式による流体流出防止タンカー
2か月前
スズキ株式会社
船外機
28日前
ヤマハ発動機株式会社
船外機
4か月前
常石造船株式会社
メタノール燃料船
5か月前
スズキ株式会社
船外機
2か月前
スズキ株式会社
船外機
28日前
スズキ株式会社
船外機
2か月前
株式会社テラサン
位置保持システム
8か月前
誠加興業股分有限公司
呼吸用マスク
10か月前
藤倉コンポジット株式会社
架台
5か月前
川崎汽船株式会社
ドライアイス輸送船
11か月前
炎重工株式会社
自律航行浮遊体
4か月前
株式会社神戸タフ興産
船舶の甲板構造
6か月前
株式会社ユピテル
システム及びプログラム等
1か月前
株式会社大林組
浮体式構造物の設置方法
3か月前
スズキ株式会社
電動船外機
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ