TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025072172
公報種別
公開特許公報(A)
公開日
2025-05-09
出願番号
2023182748
出願日
2023-10-24
発明の名称
船舶追跡装置、船舶自動操船システム、船舶追跡方法、船舶追跡プログラム
出願人
古野電気株式会社
代理人
弁理士法人 楓国際特許事務所
主分類
G01S
17/66 20060101AFI20250430BHJP(測定;試験)
要約
【課題】自船の近傍の狭い領域に対しても目標を追跡する。
【解決手段】
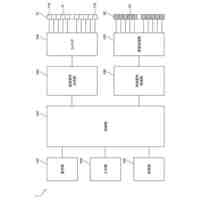
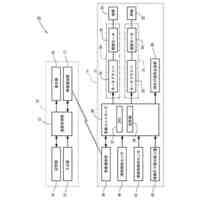
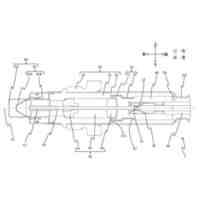
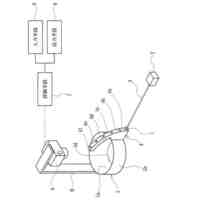
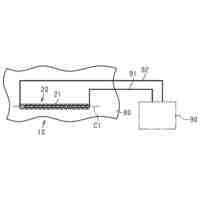
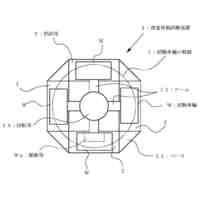
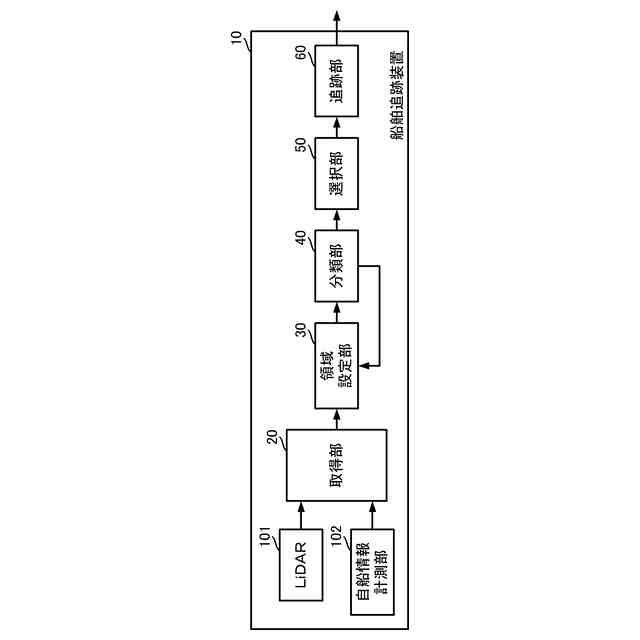
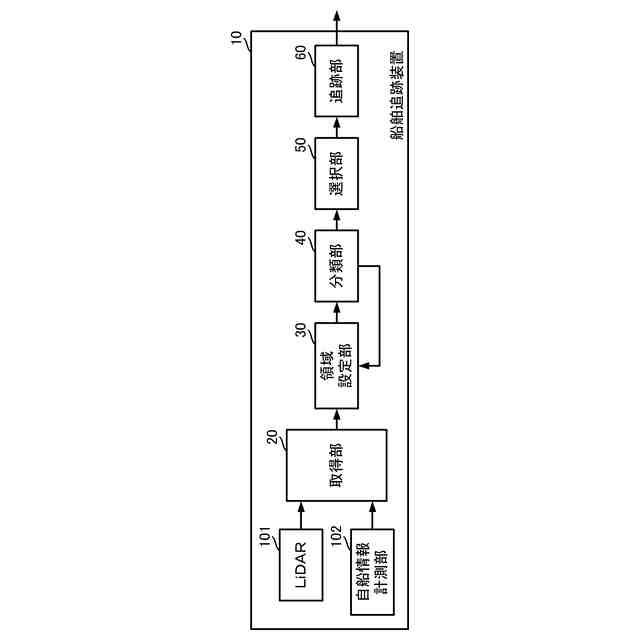
船舶追跡装置10は、取得部20、領域設定部30、選択部50、および追跡部60を備える。取得部20は、自船を基準として他船を含む周辺環境を測距して得られた複数の特徴点から構成される点群データを取得する。領域設定部30は、複数の特徴点の位置の分布に基づいて複数の特徴点に対する個別領域に設定する。選択部50は、個別領域の大きさに基づいて追跡対象船を選択する。追跡部60は、追跡対象船の位置の時系列変化に基づいて追跡データを生成する。
【選択図】 図1
特許請求の範囲
【請求項1】
自船を基準として他船を含む周辺環境を測距して得られた複数の特徴点から構成される点群データを取得する取得部と、
前記複数の特徴点の位置の分布に基づいて前記複数の特徴点に対する個別領域に設定する領域設定部と、
前記個別領域の大きさに基づいて追跡対象船を選択する選択部と、
前記追跡対象船の位置の時系列変化に基づいて追跡データを生成する追跡部と、
を備える、船舶追跡装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の船舶追跡装置であって、
前記特徴点は、三次元位置座標で表される、
船舶追跡装置。
【請求項3】
請求項2に記載の船舶追跡装置であって、
前記領域設定部は、前記三次元位置座標を用いて前記複数の個別領域を設定し、
前記追跡部は、前記三次元位置座標を二次元に変換して生成される二次元位置座標に基づいて前記追跡データを生成する、
船舶追跡装置。
【請求項4】
請求項1に記載の船舶追跡装置であって、
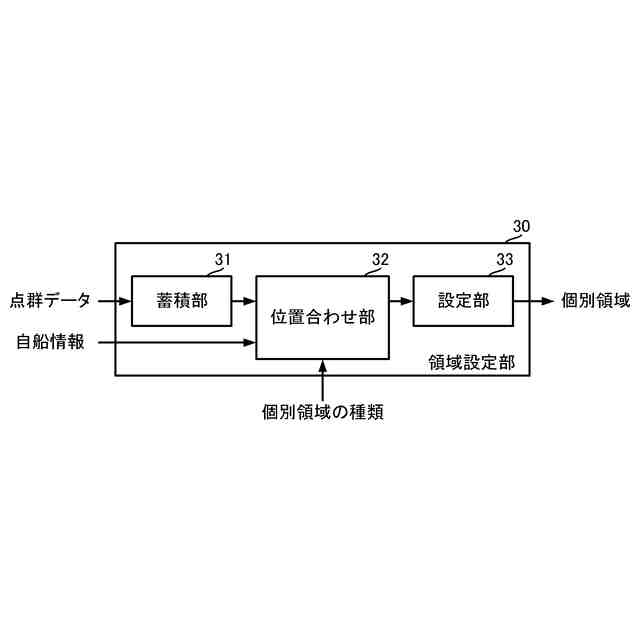
前記領域設定部は、
複数時刻の前記点群データを蓄積する蓄積部と、
SLAM処理を用いて、前記複数時刻の前記点群データに含まれる複数時刻の特徴点の位置合わせを行う位置合わせ部と、
前記位置合わせした前記複数時刻の前記特徴点に基づいて前記個別領域を設定する設定部と、
を備える、
船舶追跡装置。
【請求項5】
請求項1に記載の船舶追跡装置であって、
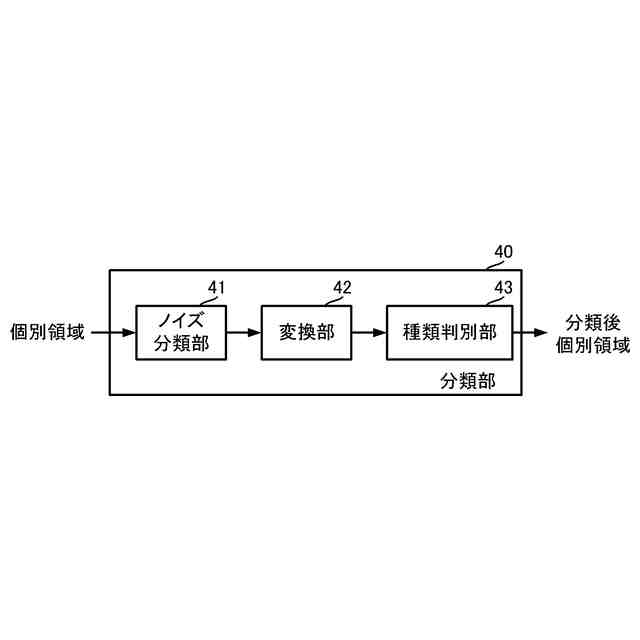
前記個別領域の種類を分類する分類部を備え、
前記選択部は、前記分類した種類に基づいて追跡対象船を選択する、
船舶追跡装置。
【請求項6】
請求項4に記載の船舶追跡装置であって、
前記位置合わせ部は、陸に分類された個別領域の検知領域における割合に応じて、SLAM処理を用いるか否かを選択する、
船舶追跡装置。
【請求項7】
請求項6に記載の船舶追跡装置であって、
前記位置合わせ部は、前記割合が割合用閾値以下であるとき、前記SLAM処理を用いずに前記位置合わせを行う、
船舶追跡装置。
【請求項8】
請求項7に記載の船舶追跡装置であって、
前記自船の位置および姿勢を計測する自船情報計測部を備え、
前記位置合わせ部は、前記SLAM処理を用いないとき、前記自船の位置座標および姿勢を用いて前記位置合わせを行う、
船舶追跡装置。
【請求項9】
請求項5に記載の船舶追跡装置であって、
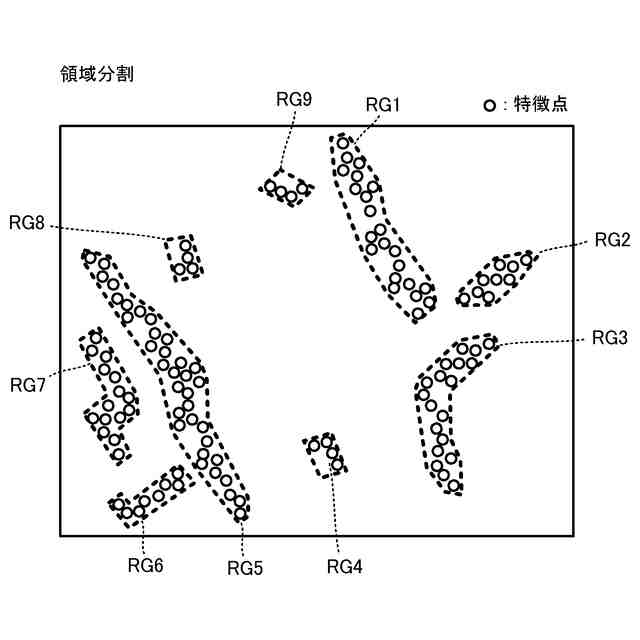
前記領域設定部は、同一時刻における隣り合う特徴点間の距離が領域設定用閾値以下である前記複数の特徴点の集合毎に前記個別領域を設定する、
船舶追跡装置。
【請求項10】
請求項5に記載の船舶追跡装置であって、
前記分類部は、
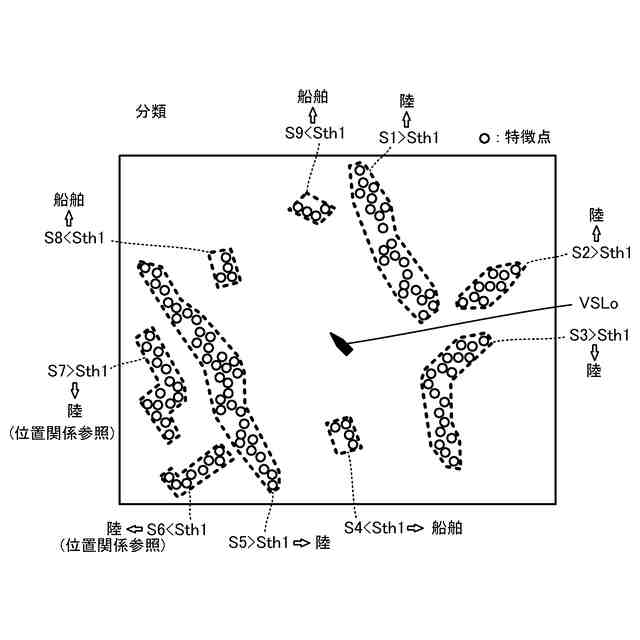
前記個別領域の大きさが分類用閾値以上であれば、前記個別領域の種類を陸に分類し、
前記個別領域の大きさが分類用閾値未満であれば、前記個別領域の種類を船に分類する、
船舶追跡装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、他船の追跡を行う技術に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
特許文献1には、レーダを用いて他船等の目標を追跡する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2012-042343号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、レーダでは、港内や狭水路のような自船の近傍の狭い領域において目標の検出ができず、目標を追跡することができない。
【0005】
したがった、本発明は、自船の近傍の狭い領域に対しても目標を追跡できる技術を提供することにある。
【課題を解決するための手段】
【0006】
この発明の船舶追跡装置は、取得部、領域設定部、選択部、および追跡部を備える。取得部は、自船を基準として他船を含む周辺環境を測距して得られた複数の特徴点から構成される点群データを取得する。領域設定部は、複数の特徴点の位置の分布に基づいて複数の特徴点に対する個別領域に設定する。選択部は、個別領域の大きさに基づいて追跡対象船を選択する。追跡部は、追跡対象船の位置の時系列変化に基づいて追跡データを生成する。
【0007】
この構成では、船舶追跡装置は、レーダでは不可能な近距離において陸や船舶等の物標を検知できる。さらに、船舶追跡装置は、物標から船舶(追跡の目標物標)を選択できる。そして、船舶追跡装置は、船舶の位置の変化を検知できることで、船舶の追跡データを生成できる。これにより、船舶追跡装置は、自船の近傍の狭い領域に対しても船舶(目標)を追跡できる
また、この発明の船舶追跡装置では、特徴点は、三次元位置座標で表される。
【0008】
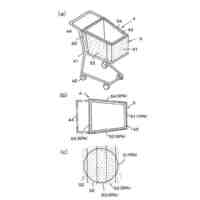
この構成は、例えば、LiDARを用いた態様を示し、船舶(目標)を含む各物表を三次元の位置で検知でき、検知性能が向上する。
【0009】
また、この発明の船舶追跡装置では、領域設定部は、三次元位置座標を用いて複数の個別領域に設定する。追跡部は、三次元位置座標を二次元に変換して生成される二次元位置座標に基づいて追跡データを生成する。
【0010】
この構成では、追跡対象の船舶に対する追跡精度を低下させることなく、追跡処理の負荷を軽減できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
古野電気株式会社
物標検出装置、物標検出方法およびプログラム
9日前
個人
粒子分析装置
1か月前
株式会社イシダ
計量装置
1か月前
日本精機株式会社
表示装置
18日前
株式会社エビス
水準器
17日前
個人
準結晶の解析方法
24日前
日本精機株式会社
アセンブリ
24日前
個人
アクセサリー型テスター
1か月前
株式会社豊田自動織機
自動走行体
23日前
個人
浸透探傷試験方法
13日前
株式会社不二越
塵埃噴射装置
12日前
日本碍子株式会社
ガスセンサ
17日前
株式会社ミツトヨ
画像測定機
1か月前
株式会社テイエルブイ
振動検出装置
1か月前
ダイハツ工業株式会社
試料セル
1か月前
トヨタ自動車株式会社
制御装置
13日前
株式会社東芝
センサ
12日前
トヨタ自動車株式会社
検査装置
1か月前
日本特殊陶業株式会社
ガスセンサ
24日前
トヨタ自動車株式会社
電気自動車
1か月前
日本特殊陶業株式会社
ガスセンサ
11日前
GEE株式会社
光学特性測定装置
23日前
日本特殊陶業株式会社
ガスセンサ
12日前
学校法人 中央大学
管内径推定装置
3日前
株式会社不二越
X線測定装置
18日前
TDK株式会社
アレイセンサ
13日前
株式会社不二越
X線測定装置
18日前
個人
多段電磁加速による高力積衝撃試験機
5日前
株式会社TISM
センサ部材
23日前
東ソー株式会社
簡易型液体クロマトグラフ
1か月前
TDK株式会社
計測装置
18日前
東洋紡株式会社
ヘムタンパク質の安定化方法
6日前
株式会社小糸製作所
物体検知システム
24日前
株式会社ニコン
検出装置
1か月前
大和製衡株式会社
表示システム
1か月前
リバークル株式会社
荷重移動試験装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ