TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064718
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023174670
出願日
2023-10-06
発明の名称
位置関係検出システム
出願人
株式会社ダイフク
代理人
弁理士法人R&C
主分類
B66C
13/48 20060101AFI20250410BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】保持部と移載対象箇所との相対的な位置関係を示す検出対象量に振動が生じる場合であっても、導出される静止検出対象量の精度を高めやすい技術の実現が望まれる。
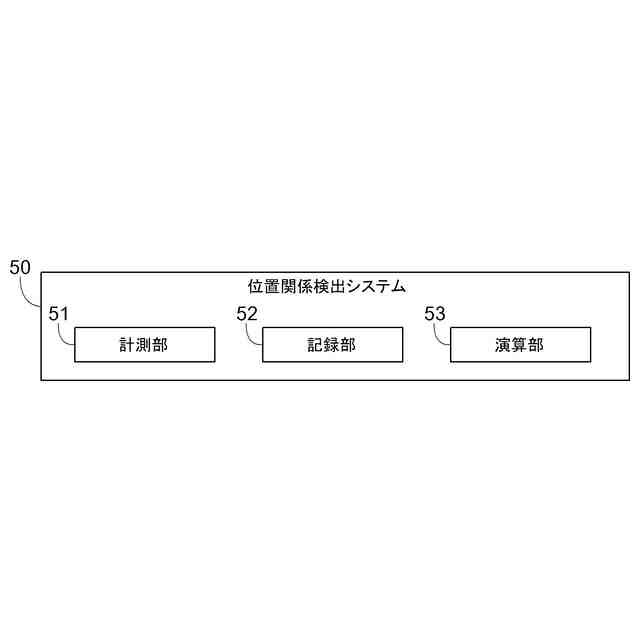
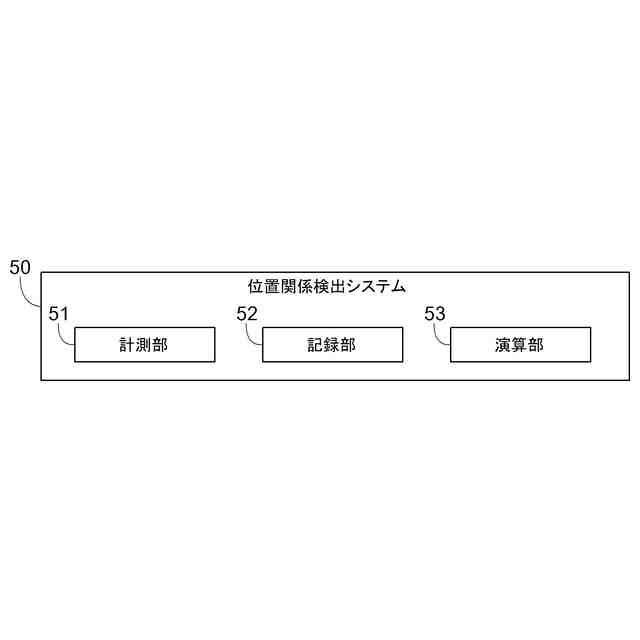
【解決手段】位置関係検出システム50は、位置関係を計測する計測部51と、計測部51により得られた計測データを時系列で記録する記録部52と、演算部53と、を備える。演算部53は、記録部52に記録された計測データに基づいて、位置関係を示す特定の検出対象量の時系列データである対象時系列データを取得する。演算部53は、対象時系列データに表れた検出対象量の振動である対象振動の複数のピークのうちの2つである第1ピーク及び第2ピークを特定する。演算部53は、第1ピークと第2ピークとの間の対象時系列データに含まれる検出対象量の平均値を、対象振動がなくなった後の検出対象量である静止検出対象量として求める。
【選択図】図3
特許請求の範囲
【請求項1】
保持部により搬送対象物を保持して前記搬送対象物を搬送する搬送装置と、前記搬送装置による前記搬送対象物の移載が行われる移載対象箇所と、を備えた搬送設備において、前記保持部と前記移載対象箇所との相対的な位置関係を検出する位置関係検出システムであって、
前記位置関係を計測する計測部と、前記計測部により得られた計測データを時系列で記録する記録部と、演算部と、を備え、
前記演算部は、
前記記録部に記録された前記計測データに基づいて、前記位置関係を示す特定の検出対象量の時系列データである対象時系列データを取得し、
前記対象時系列データに表れた前記検出対象量の振動である対象振動の複数のピークのうちの2つである第1ピーク及び第2ピークを特定し、
前記第1ピークと前記第2ピークとの間の前記対象時系列データに含まれる前記検出対象量の平均値を、前記対象振動がなくなった後の前記検出対象量である静止検出対象量として求める、位置関係検出システム。
続きを表示(約 1,000 文字)
【請求項2】
前記搬送装置は、前記保持部を前記移載対象箇所へ向けて下降させることで前記搬送対象物の前記移載対象箇所への移載を行うように構成され、
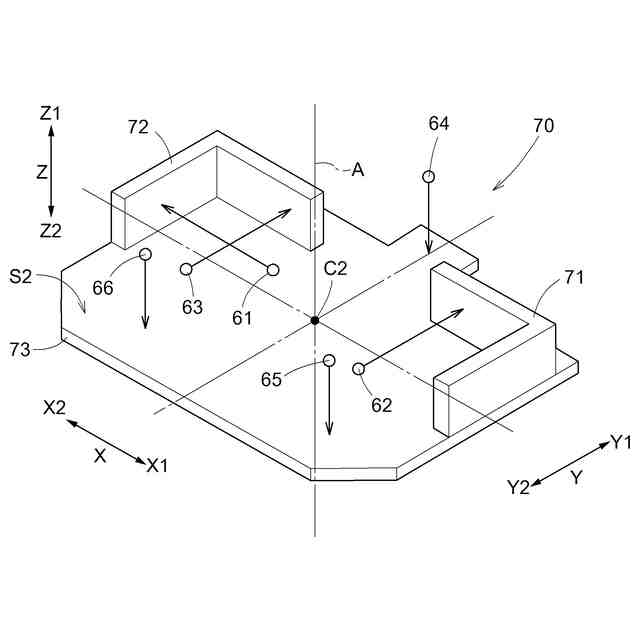
上下方向に沿う方向をZ方向とし、前記Z方向に直交する方向の1つをX方向とし、前記Z方向及び前記X方向の双方向に直交する方向をY方向として、
前記検出対象量は、
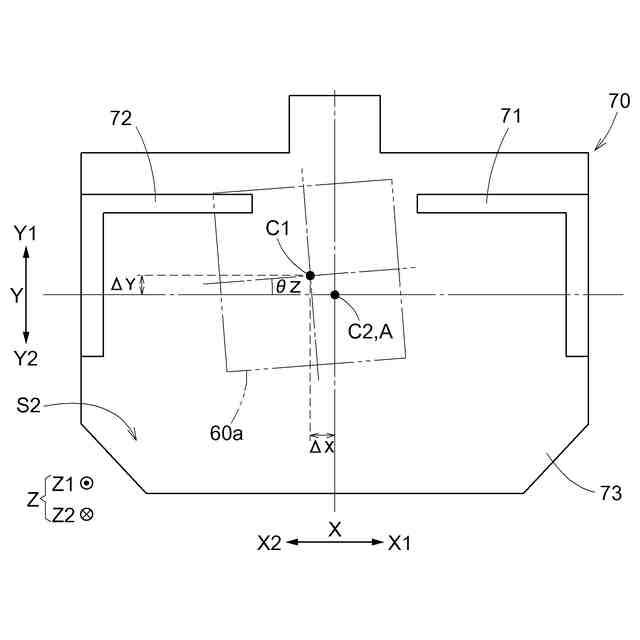
前記保持部の基準位置である保持基準位置と前記移載対象箇所の基準位置である対象基準位置との前記X方向の距離であるX方向距離と、
前記保持基準位置と前記対象基準位置との前記Y方向の距離であるY方向距離と、
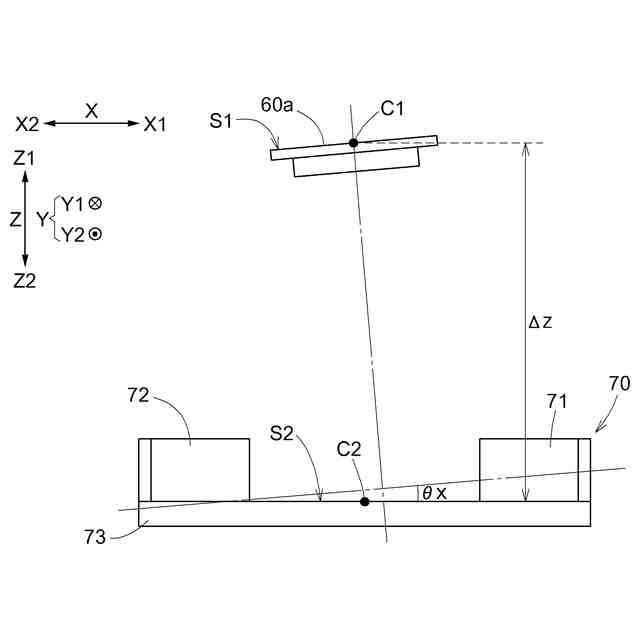
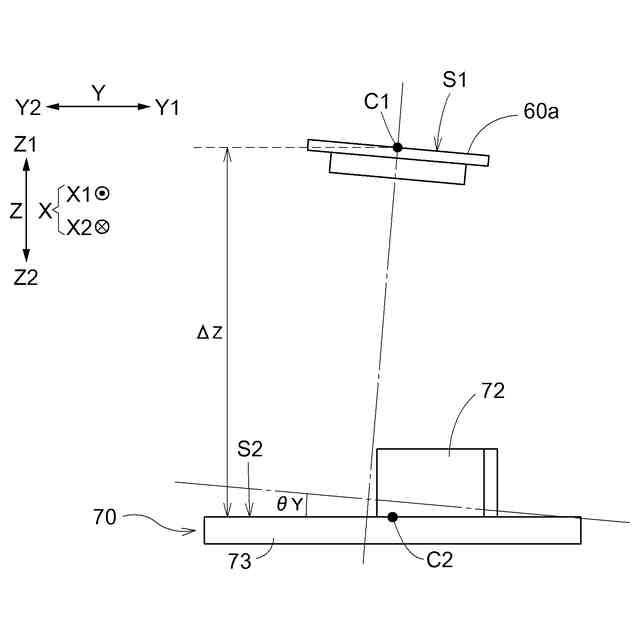
前記保持基準位置と前記対象基準位置との前記Z方向の距離であるZ方向距離と、
前記保持部と前記移載対象箇所との前記Z方向に沿う基準軸心回りの旋回角であるZ軸旋回角と、
前記保持部の基準面である保持基準面と前記移載対象箇所の基準面である対象基準面との前記X方向での傾きであるX方向傾斜角と、
前記保持基準面と前記対象基準面との前記Y方向での傾きであるY方向傾斜角と、
の少なくとも1つである、請求項1に記載の位置関係検出システム。
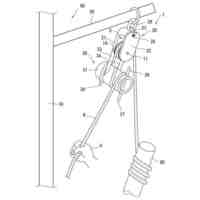
【請求項3】
前記搬送装置は、前記保持部を昇降させる昇降装置を備え、
前記昇降装置は、回転体と、前記回転体に巻き取り及び繰り出し自在に巻回された被巻取部材と、前記回転体を回転駆動する昇降駆動モータと、を備え、前記被巻取部材により前記保持部を吊り下げた状態で、前記回転体を回転させることによる前記被巻取部材の巻き取り及び繰り出しによって前記保持部を昇降させるように構成され、
前記移載対象箇所には、前記搬送対象物の下部に係合して前記搬送対象物の位置決めを行う位置決め機構が設けられている、請求項2に記載の位置関係検出システム。
【請求項4】
前記記録部には、予め定められた設定期間の連続する前記計測データが記録され、
前記演算部は、前記設定期間の前記対象時系列データにおける最先のピークを前記第1ピークとし、最後のピークを前記第2ピークとして特定する、請求項1から3のいずれか一項に記載の位置関係検出システム。
【請求項5】
前記演算部は、前記第1ピークと前記第2ピークとの間の前記対象時系列データに含まれる前記検出対象量の値のうち、予め定められた判定条件に基づいて異常値と判定された値を除く全ての値を、前記平均値の演算に用いる、請求項1から3のいずれか一項に記載の位置関係検出システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、保持部により搬送対象物を保持して搬送対象物を搬送する搬送装置と、搬送装置による搬送対象物の移載が行われる移載対象箇所と、を備えた搬送設備において、保持部と移載対象箇所との相対的な位置関係を検出する位置関係検出システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
上記のような位置関係検出システムの一例が、特許第6146537号公報(特許文献1)に開示されている。以下、この背景技術の説明では、特許文献1における符号を括弧内に引用する。特許文献1に記載の搬送設備は、保持部(15)により搬送対象物を保持して搬送対象物を搬送する天井走行車(10)と、天井走行車(10)による搬送対象物の移載が行われるロードポート(3)と、を備えている。そして、特許文献1に記載の位置関係検出システムは、天井走行車(10)に搭載されるティーチングユニット(20)を用いて、保持部(15)とロードポート(3)との相対的な位置関係を検出するように構成されている。具体的には、ティーチングユニット(20)がロードポート(3)の上方に配置された状態で、ロードポート(3)の基準位置を原点とした場合の保持部(15)の実位置や、ロードポート(3)の基準面に対する保持部(15)の回転角度や傾斜角度が、上記の位置関係を示す検出対象量として検出される。
【先行技術文献】
【特許文献】
【0003】
特許第6146537号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、保持部と移載対象箇所(特許文献1では、ロードポート)との相対的な位置関係を示す検出対象量に、振動が生じる場合がある。例えば、特許文献1の段落0028及び図6に記載されているように、ロードポートの上方においてティーチングユニットが揺れている場合に、検出対象量に振動が生じる。特許文献1によれば、このように検出対象量に振動が生じる場合に、検出対象量の振幅の中心値を求めることで、検出対象量を正確に求めることができる。
【0005】
特許文献1には検出対象量の振幅の中心値を求める方法についての開示はないが、例えば、検出対象量の時間平均値を求めることで、検出対象量の振幅の中心値を求めることが考えられる。しかし、時間平均値は、平均値を求める時間範囲によって異なる値となり得る。そのため、単に検出対象量の時間平均値を求めることでは、検出対象量の振幅の中心値(言い換えれば、検出対象量の振動がなくなった後の検出対象量である静止検出対象量)を精度良く求めることができない場合がある。
【0006】
そこで、保持部と移載対象箇所との相対的な位置関係を示す検出対象量に振動が生じる場合であっても、導出される静止検出対象量の精度を高めやすい技術の実現が望まれる。
【課題を解決するための手段】
【0007】
本開示に係る位置関係検出システムは、保持部により搬送対象物を保持して前記搬送対象物を搬送する搬送装置と、前記搬送装置による前記搬送対象物の移載が行われる移載対象箇所と、を備えた搬送設備において、前記保持部と前記移載対象箇所との相対的な位置関係を検出する位置関係検出システムであって、前記位置関係を計測する計測部と、前記計測部により得られた計測データを時系列で記録する記録部と、演算部と、を備え、前記演算部は、前記記録部に記録された前記計測データに基づいて、前記位置関係を示す特定の検出対象量の時系列データである対象時系列データを取得し、前記対象時系列データに表れた前記検出対象量の振動である対象振動の複数のピークのうちの2つである第1ピーク及び第2ピークを特定し、前記第1ピークと前記第2ピークとの間の前記対象時系列データに含まれる前記検出対象量の平均値を、前記対象振動がなくなった後の前記検出対象量である静止検出対象量として求める。
【0008】
本構成によれば、検出対象量の時間平均値を、検出対象量の振動がなくなった後の検出対象量である静止検出対象量として求める場合に、第1ピークと第2ピークとの間の対象時系列データを対象として平均値が求められる。よって、平均値を求める対象となる対象時系列データに含まれる、振幅の中心値に対して正の側に振れたデータの数と、振幅の中心値に対して負の側に振れたデータの数とを、同等(同一又は同程度)にすることができ、これにより、振幅の中心値に対して正の側又は負の側への、検出対象量の平均値の偏りを小さく抑えやすい。従って、演算部により導出される静止検出対象量の精度を高めやすい。
【0009】
位置関係検出システムの更なる特徴と利点は、図面を参照して説明する実施形態についての以下の記載から明確となる。
【図面の簡単な説明】
【0010】
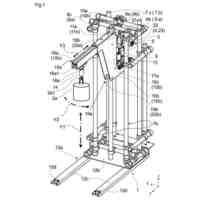
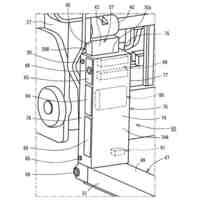
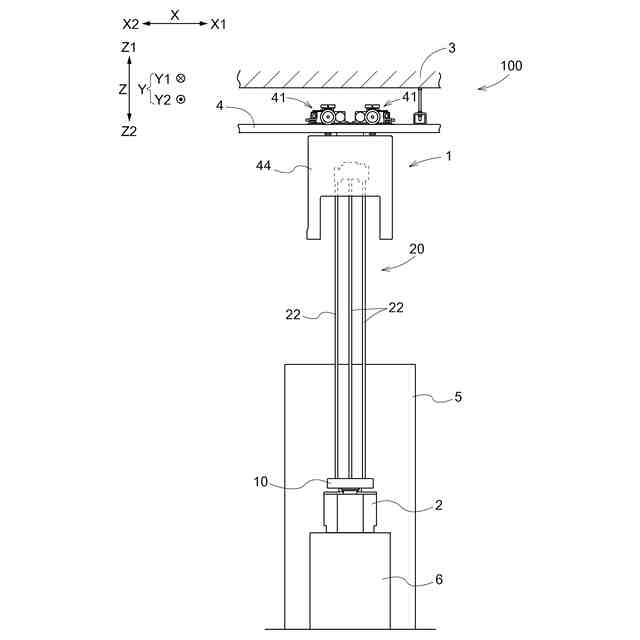
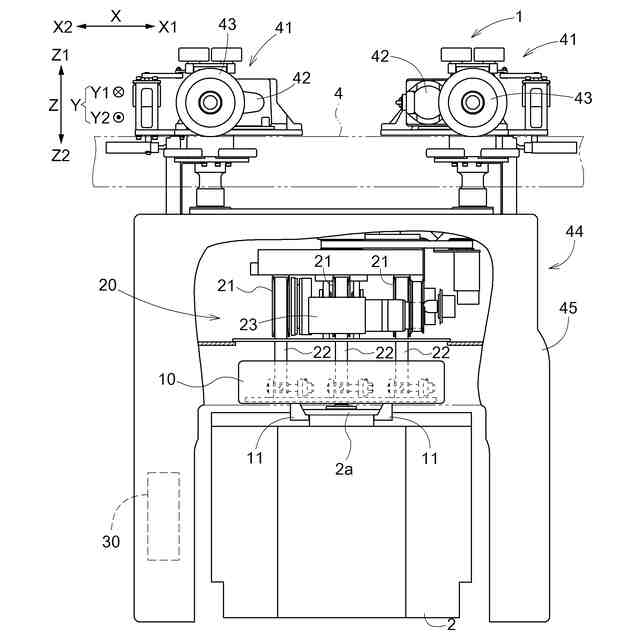
実施形態に係る搬送設備を示す図
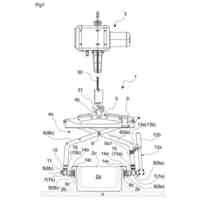
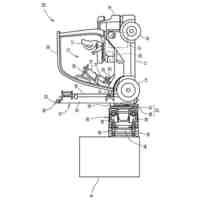
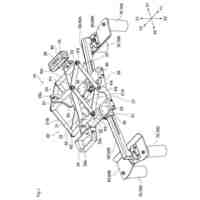
実施形態に係る搬送装置を示す図
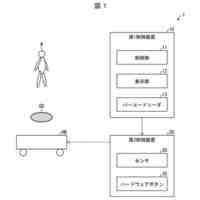
実施形態に係る位置関係検出システムを示すブロック図
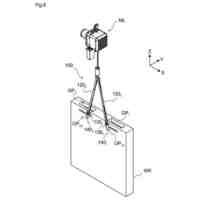
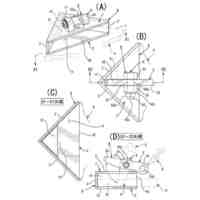
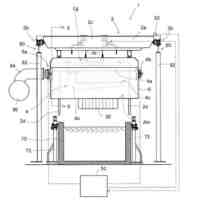
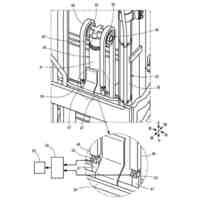
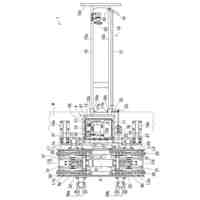
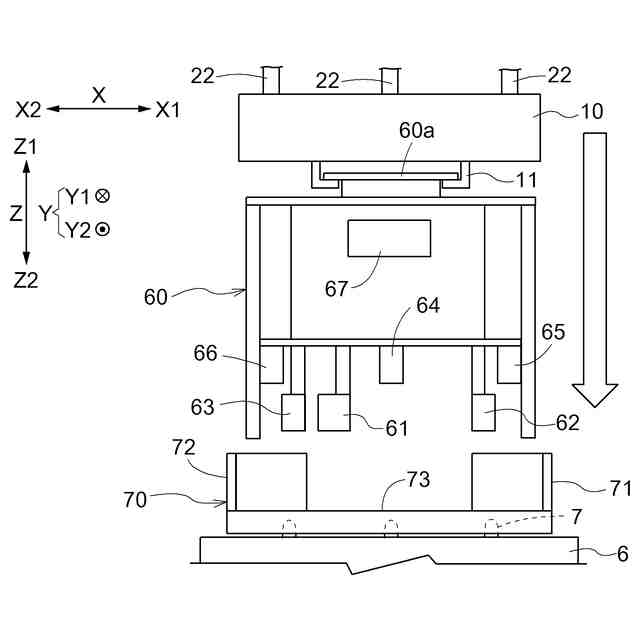
実施形態に係る検出ユニット及び被検出ユニットを示す図
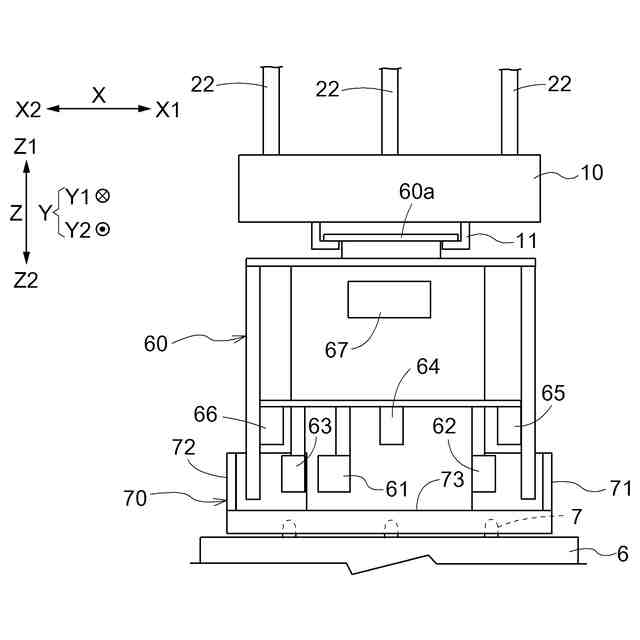
実施形態に係る検出ユニット及び被検出ユニットを示す図
実施形態に係る被検出ユニットの斜視図
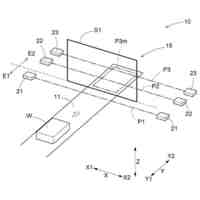
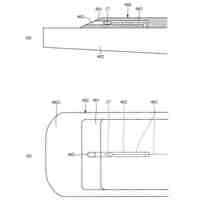
X方向距離、Y方向距離、及びZ軸旋回角の説明図
Z方向距離及びX方向傾斜角の説明図
Z方向距離及びY方向傾斜角の説明図
検出対象量の時系列データの一例を示す図
検出対象量の時系列データの別例を示す図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイフク
搬送設備
9日前
株式会社ダイフク
物品搬送設備
2日前
株式会社ダイフク
搬送システム
3日前
株式会社ダイフク
物品搬送設備
10日前
株式会社ダイフク
物品仕分け設備
15日前
個人
懸吊装置
9か月前
ユニパルス株式会社
吊具
6日前
ユニパルス株式会社
吊具
11か月前
個人
海上コンテナ昇降装置
6か月前
ユニパルス株式会社
吊具装置
6か月前
ユニパルス株式会社
荷役装置
5か月前
ユニパルス株式会社
リフト装置
16日前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
産業車両
6か月前
水戸工業株式会社
吊り具
2か月前
株式会社豊田自動織機
荷役車両
4か月前
大栄産業株式会社
クランプ
24日前
ユニパルス株式会社
荷役助力装置
7日前
白山工業株式会社
バランサ
2か月前
株式会社日本キャリア工業
昇降機
9か月前
ユニパルス株式会社
荷役助力装置
1か月前
株式会社ユピテル
システム等
2か月前
個人
建築部材の吊り上げ装置
8か月前
株式会社キトー
タイヤ用吊具
1か月前
株式会社豊田自動織機
フォークリフト
3か月前
株式会社大林組
養生方法
8か月前
株式会社五十鈴製作所
搬送装置
10日前
フジテック株式会社
エレベータ
4か月前
新英運輸株式会社
自動車用台車
1か月前
株式会社豊田自動織機
フォークリフト
11か月前
小野谷機工株式会社
ジャッキ装置
11か月前
白山工業株式会社
腕重量補償機構
8か月前
株式会社タダノ
高所作業車
8か月前
有限会社サエキ
玉掛用器具
5か月前
中坪造園有限会社
吊り荷降ろし具
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ