TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025060593
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2024202333,2023110589
出願日
2024-11-20,2017-03-10
発明の名称
電動型の締め紐及びジェスチャ制御を有するフットウェア
出願人
ナイキ イノベイト シーブイ
代理人
個人
主分類
A43B
3/44 20220101AFI20250403BHJP(履物)
要約
【課題】電動型の締め紐及びジェスチャ制御を有するフットウェアの物品に関する。
【解決手段】フットウェアの物品は、電動型の張力調整システム、センサ、及びジェスチャ制御システムを含む。1つ又は複数のセンサから受け取られた情報に基づいて、ジェスチャ制御システムは、促進ジェスチャを検出することができ、更なる命令を受け取るべく、有効モードに入る。有効モードにおいて、システムは様々な張力調整コマンドに対応する様々な異なる制御ジェスチャを検出することができる。
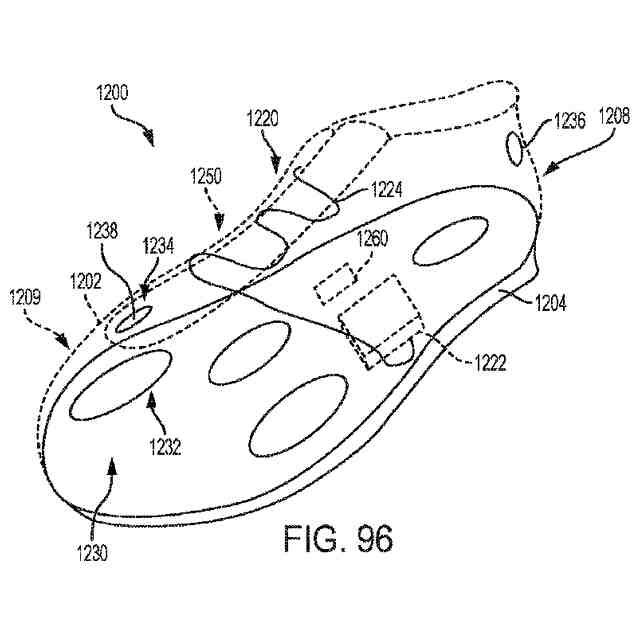
【選択図】図96
特許請求の範囲
【請求項1】
方法であって、
フットウェアの物品の第1センサから第1の組の情報を受け取ること、
前記第1の組の情報に基づいて促進ジェスチャを識別すること、
前記促進ジェスチャに基づいて有効モードに入ること、
前記有効モードにある間に、前記フットウェアの物品内の少なくとも1つのセンサから
第2の組の情報を受け取ること、
前記有効モードにある間に、前記第2の組の情報に基づいて制御ジェスチャを識別する
こと、
前記制御ジェスチャに対応する張力調整コマンドを判定すること、
前記張力調整コマンドに従って前記フットウェアの物品の張力調整装置を制御すること
、を備える方法。
続きを表示(約 720 文字)
【請求項2】
前記少なくとも1つのセンサは、第1センサである、請求項1に記載の方法。
【請求項3】
前記少なくとも1つのセンサは、第1センサとは異なる第2センサである、請求項1に
記載の方法。
【請求項4】
前記促進ジェスチャは、前記フットウェアの物品の踵が第2のフットウェアの物品の踵
によってクリックされることである、請求項1乃至3のいずれか1項に記載の方法。
【請求項5】
前記張力調整コマンドは、前記フットウェアの物品を十分に締め付けるための命令であ
る、請求項1乃至3のいずれか1項に記載の方法。
【請求項6】
前記張力調整コマンドは、第1のフットウェアの物品を徐々に締め付けるための命令で
ある、請求項1乃至3のいずれか1項に記載の方法。
【請求項7】
前記張力調整コマンドは、第1のフットウェアの物品を十分に緩めるための命令である
、請求項1乃至3のいずれか1項に記載の方法。
【請求項8】
前記張力調整コマンドは、第1のフットウェアの物品を徐々に緩めるための命令である
、請求項1乃至3のいずれか1項に記載の方法。
【請求項9】
前記制御ジェスチャは、前記フットウェアの物品の爪先がタップされることである、請
求項1乃至3のいずれか1項に記載の方法。
【請求項10】
前記制御ジェスチャは、前記フットウェアの物品の踵がタップされることである、請求
項1乃至3のいずれか1項に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書において開示されている主題は、一般に、電動型の締め紐及びジェスチャ制御
を有するフットウェアの物品に関する。
続きを表示(約 6,400 文字)
【背景技術】
【0002】
フットウェアの物品は、従来、表甲、足底構造、並びに、フットウェアの物品を着用者
の足との関係において固定することができる締め紐メカニズム又はその他のメカニズムを
含む。又、フットウェアの物品は、センサシステムをも含む。このようなセンサシステム
は、分析などを目的として後から使用するべくアクセスされうる性能データを収集する。
このような分析は、様々な性能データのいずれかに加えて、歩調、拍子、距離、及びジャ
ンプ特性に関係する情報を提供することができる。
【図面の簡単な説明】
【0003】
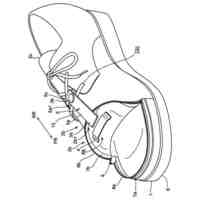
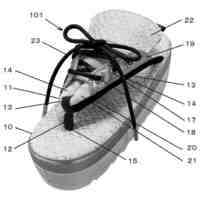
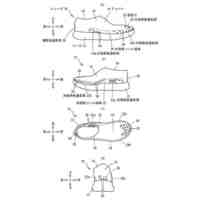
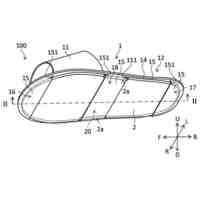
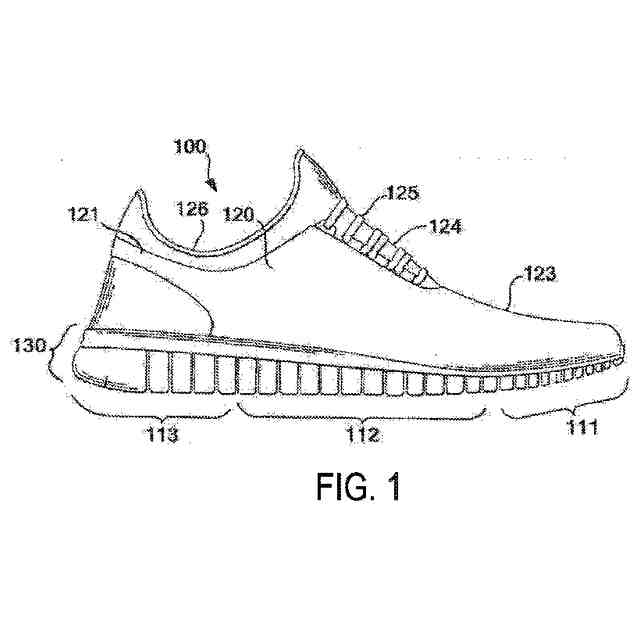
靴の側面図である。
図1の靴の反対側の側面図である。
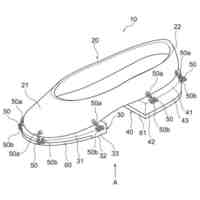
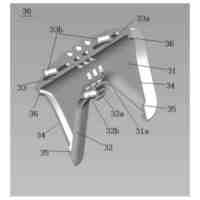
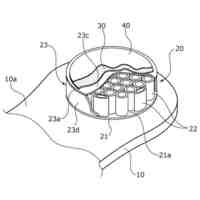
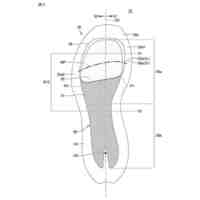
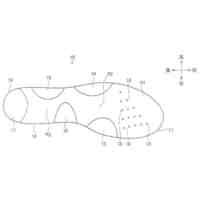
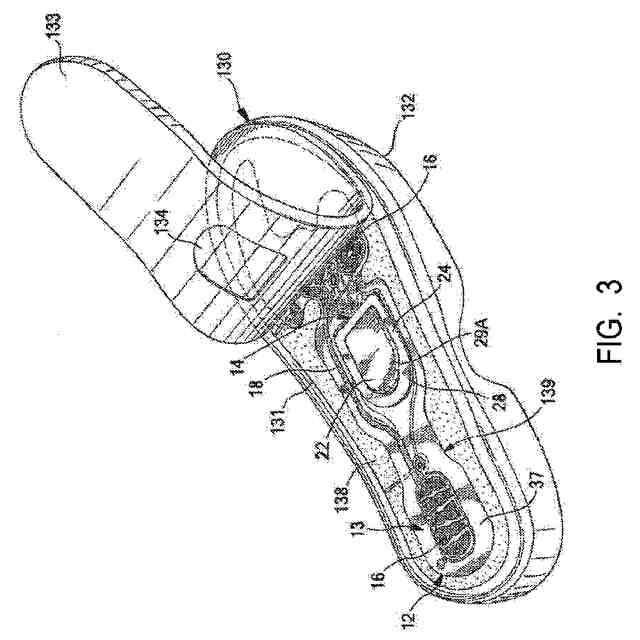
本発明の態様によるセンサシステムの一実施形態を内蔵した(靴の表甲が除去され、且つ、足接触部材が、わきに折り畳まれた状態の)靴の足底の平面斜視図である。
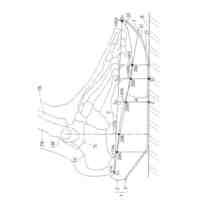
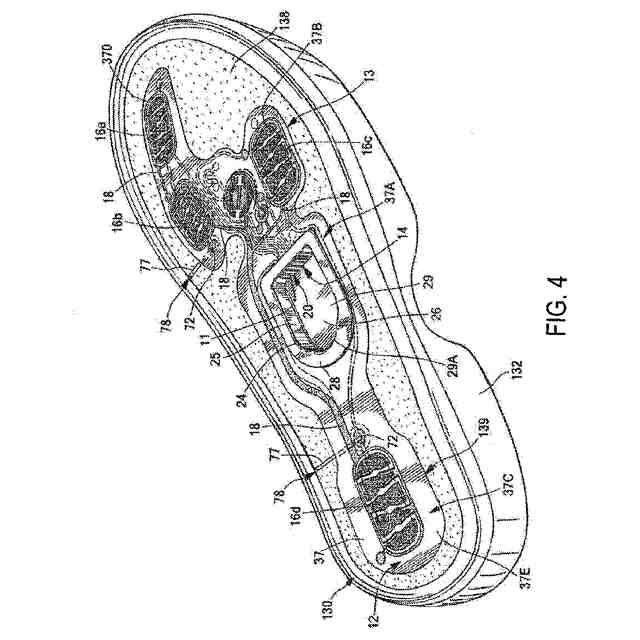
靴の足接触部材が除去され、且つ、電子モジュールが除去された状態の、図3の足底及びセンサシステムの平面斜視図である。
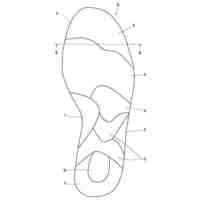
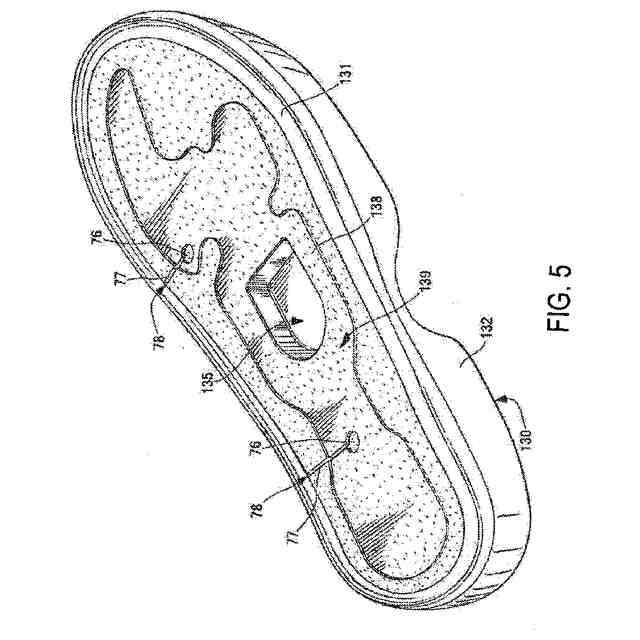
靴の足接触部材が除去された状態の、且つ、センサシステムを有してはいない、図3の足底の平面斜視図である。
外部電子装置との通信状態にある、センサシステムと共に使用される能力を有する電子モジュールの一実施形態の概略図である。
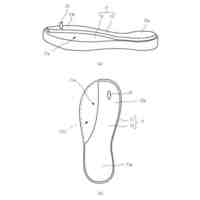
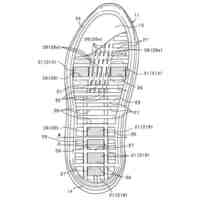
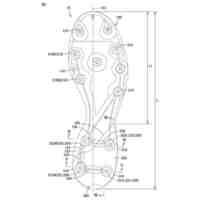
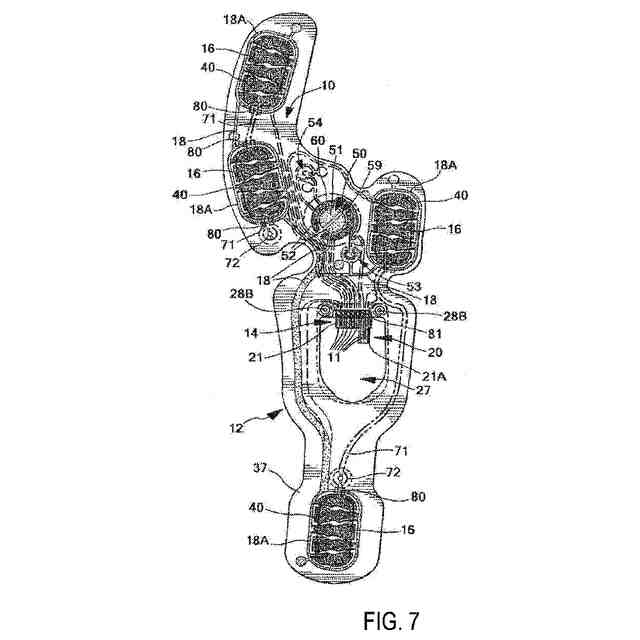
ユーザの右足用のフットウェアの物品の足底構造内において位置決めされるように適合された、図3のセンサシステムのインサートの平面図である。
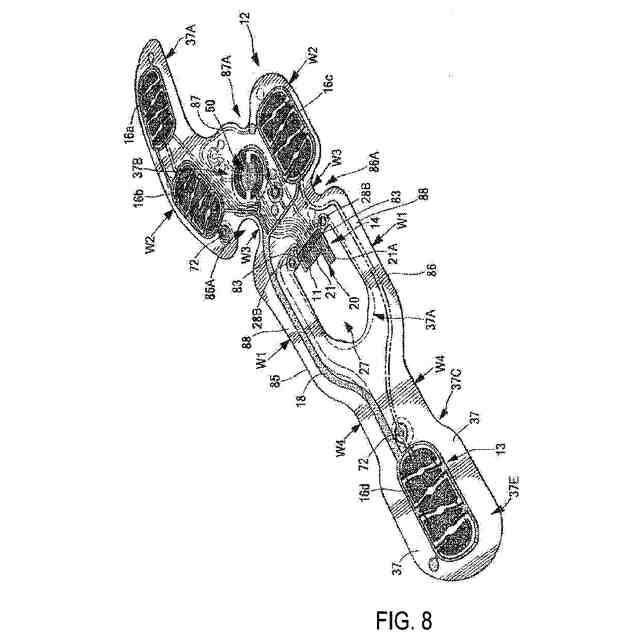
図7のインサートの平面斜視図である。
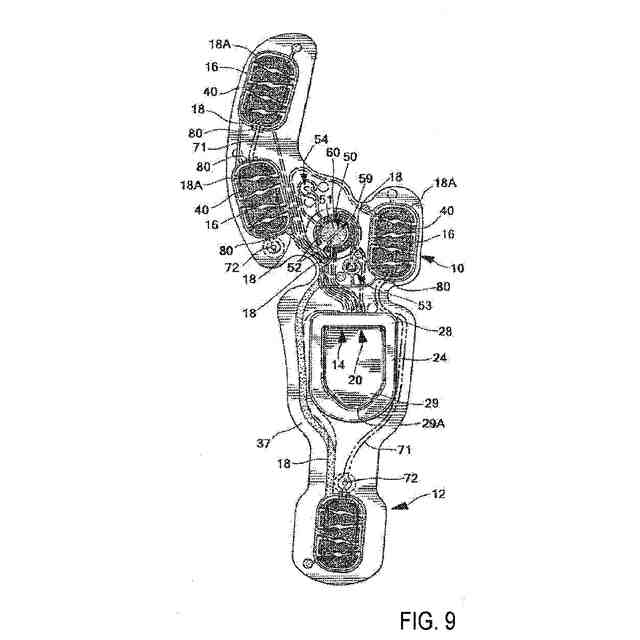
図7のインサートを含む、図3のセンサシステムの平面図である。
図9のセンサシステムの平面斜視図である。
図9のセンサシステムの一部分の拡大平面図である。
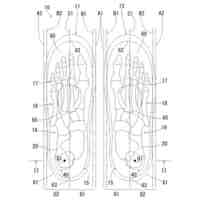
図9のセンサシステムと、ユーザの左足用のフットウェアの物品の足底構造内において使用されるように適合された類似のセンサシステムと、の平面図である。
4つの異なる層を示す、図7のインサートの分解斜視図である。
図13のインサートの第1層の平面図である。
図14の第1層の一部分の拡大平面図である。
図13のインサートの第2層の平面図である。
図16の第2層の一部分の拡大平面図である。
図13のインサートのスペーサ層の平面図である。
図13のインサートの底部層の平面図である。
図9のセンサシステムのコンポーネントによって形成される回路の一実施形態を示す概略回路図である。
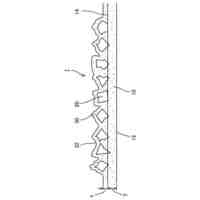
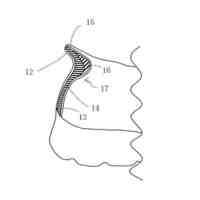
図11のライン21-21によって示されているエリアを概略的に示す拡大断面図である。
図9のセンサシステムの底面図である。
センサシステムの通気口の上部において接続されたフィルタを有する、図22Aに示されているセンサシステムの底面図である。
センサの位置を示す破線を有する、本発明の態様によるセンサシステム用のインサートの別の実施形態のスペーサ層の平面図である。
インサートに接続されたフィルタの位置を示す破線を有する、図22Cのスペーサ層を内蔵したセンサシステム用のインサートの底面図である。
外部ゲーム装置との通信状態にある、図6の電子モジュールの概略図である。
外部装置との間のメッシュ通信モードにある、センサシステムをそれぞれが含む1対の靴の概略図である。
外部装置との間の「デイジーチェーン」通信モードにある、センサシステムをそれぞれが含む1対の靴の概略図である。
外部装置との間の独立通信モードにある、センサシステムをそれぞれが含む1対の靴の概略図である。
本発明の態様によるセンサの一実施形態における圧力対抵抗値を示すプロットである。
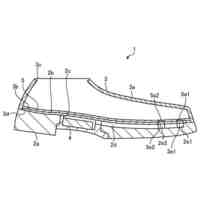
図4の足底及びセンサシステムの一部分の概略断面図である。
本発明の態様による足底及びセンサシステムの別の実施形態の一部分の概略断面図である。
動作位置において足接触部材を有する図3の足底の平面図である。
図10のライン31-31に沿って取得された図を概略的に示す断面図である。
図10のライン32-32に沿って取得された図を概略的に示す断面図である。
本発明の態様によるセンサシステムの別の実施形態の分解斜視図である。
本発明の態様によるセンサシステムの別の実施形態の分解斜視図である。
図7のセンサシステムのセンサの概略断面図である。
本発明の態様によるセンサシステムの別の実施形態を内蔵した(靴の表甲が除去され、且つ、足接触部材がわきに折り畳まれた状態の)靴の足底の平面斜視図である。
靴の足施触部材が除去された状態の、且つ、センサシステムを有してはいない、図36の足底の平面斜視図である。
靴の足接触部材が除去され、且つ、電子モジュールが除去された状態の、図36の足底及びセンサシステムの平面斜視図である。
ユーザの右足用のフットウェアの物品の足底構造内において位置決めされるように適合された、図36のセンサシステムのインサートの平面図である。
図39のインサートの第1層の平面図である。
図39のインサートの第2層の平面図である。
図39のインサートのスペーサ層の平面図である。
図39のインサートの底部層の平面図である。
4つの異なる層を示す、図39のインサートの分解斜視図である。
本発明の態様によるセンサシステムの別の実施形態を内蔵した(靴の表甲が除去され、且つ、足接触部材がわきに折り畳まれた状態の)靴の足底の平面斜視図である。
靴の足接触部材が除去された状態の、且つ、センサシステムを有してはいない、図45の足底の平面斜視図である。
靴の足接触部材が除去され、且つ、電子モジュールが除去された状態の、図45の足底及びセンサシステムの平面斜視図である。
本発明の態様によるユーザの右足用のフットウェアの物品の足底構造内において位置決めされるように適合されたセンサシステムのインサートの別の実施形態の平面図である。
図48のインサートの第1層の平面図である。
図48のインサートのスペーサ層の平面図である。
図48のインサートの第2層の平面図である。
本発明の態様によるセンサシステムのインサートの別の実施形態の平面図である。
図52のインサートの第1層の平面図である。
図52のインサートのスペーサ層の平面図である。
図52のインサートの第2層の平面図である。
図52のライン56-56に沿って取得された断面図である。
本発明の態様によるフットウェアの物品の足底構造内において凹みを形成するための方法及び装置の一実施形態を示す概略断面図である。
センサシステムのインサート部材及び足接触部材が接続された状態の、図57のフットウェアの物品の足底構造を示す概略断面図である。
本発明の態様による、フットウェアの物品の足底構造内において位置決めされたセンサシステムの別の実施形態を示す概略断面図である。
本発明の態様による、フットウェアの物品の足底構造内において位置決めされたセンサシステムの別の実施形態を示す概略断面図である。
本発明の態様によるセンサシステムと共に使用されるように構成された足接触部材の一実施形態の斜視図である。
本発明の態様によるセンサシステムの別の実施形態の斜視図である。
本発明の態様によるインサート部材内のポートの平面図及び斜視図を示す。
本発明の態様によるインサート部材内のポートの平面図及び斜視図を示す。
ポートのハウジングのコンポーネントを示す。
ポート内において使用されるインターフェイス組立体の図を示す。
ポート内において使用されるインターフェイス組立体の図を示す。
インサート部材に動作自在に接続されたインターフェイス組立体の図を示す。
インサート部材に接続されると共にカバー部材が除去された状態のポートの部分拡大平面図である。
インサート部材に装着されたポートの側面図である。
本発明の態様によるモジュールの更なる図である。
本発明の態様による接点及びモジュール担持体の斜視図である。
本発明の態様による接点及びモジュール担持体の斜視図である。
モジュールのコンポーネントの斜視図である。
モジュールのインターフェイスの接点のオーバーモールドを示す部分断面図である。
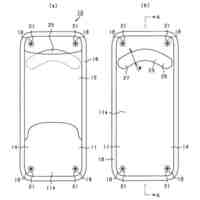
本発明の態様による照明組立体を示すモジュールの平面図である。
照明組立体のコンポーネントを示すモジュールの内部図である。
照明組立体のコンポーネントを示すモジュールの内部図である。
本発明の態様によるモジュールと関連するPCB及び接地面エクステンダの図である。
本発明の態様によるモジュールと関連するPCB及び接地面エクステンダの図である。
一実施形態による、1つの物品又は1対の物品を使用して実行しうる様々なジェスチャの概略図を示す。
センサと、張力調整装置を有する張力調整システムと、を含むフットウェアの物品の一実施形態の概略図である。
一実施形態による張力調整装置のいくつかのコンポーネントの概略図である。
一実施形態による、ジェスチャに基づいた入力に基づいて張力調整装置を動作させるための方法の概略図である。
一実施形態による、ジェスチャに基づいた入力に基づいて張力調整装置を動作させるための方法の概略図である。
一実施形態による、様々なジェスチャと張力調整システム用の様々なコマンドの間の対応性の概略図である。
【発明を実施するための形態】
【0004】
以下の図面及び説明を参照することにより、実施形態について更に十分に理解すること
ができる。図中のコンポーネントは、必ずしも縮尺が正確ではなく、その代わりに、実施
形態の原理の例示に重点が置かれている。更には、これらの図においては、同一の参照符
号により、異なる図の全体を通じて、対応する部分を表記している。
【0005】
例示用の方法及びシステムは、電動型の締め紐及びジェスチャ制御を有するフットウェ
アの物品を対象としている。例は、可能な変形を代表するものに過ぎない。そうではない
旨が明示的に記述されていない限り、コンポーネント及び機能は、任意選択であり、且つ
、組み合わせられてもよく、又は一部分が分割されてもよく、且つ、動作も、そのシーケ
ンスが変更されてもよく、或いは、組み合わせられてもよく、又は一部分が分割されても
よい。以下の説明においては、説明を目的として、例示用の実施形態の十分な理解を提供
するべく、多数の具体的な詳細事項が記述されている。但し、当業者には、本主題が、こ
れらの特定の詳細事項のそれぞれ又はすべてを伴うことなしに実施されうることが明らか
となろう。
【0006】
従来、締め紐メカニズム及びその他の固定メカニズムは、ユーザが、手作業で、張力下
において締め紐又はその他の固定メカニズムを配置し、且つ、次いで、例えば、締め紐を
結ぶなどにより、固定することにより、動作している。締め紐を張力下において配置する
と共に固定するためのモータを提供する電動型の締め紐システムが、開発されており、且
つ、フットウェアの物品に内蔵されている。このようなシステムにおいては、モータは、
ユーザが、例えば、ボタンなどの、インターフェイスとやり取りすることにより、或いは
、フットウェアの物品内の足の存在を検出するセンサにより、起動することができる。
【0007】
但し、このようなシステムは、着用者の活動を検出するべく利用されるセンサのタイプ
に依存してはいない。更には、このようなセンサは、着用者によるジェスチャに対しても
感度を有してはいない。従って、足がフットウェアの物品内に存在していることを検出す
るセンサは、例えば、締め紐を締める又は緩めるためのユーザによる意図的なコマンドに
対応するジェスチャに対して感度を有することができない。
【0008】
フットウェアの物品の着用者によるジェスチャを検出するべく活動センサを利用するセ
ンサシステムが開発されている。このようなジェスチャは、踵のクリック、爪先のタップ
、並びに、一方のフットウェアの物品によって他方のフットウェアの物品の踵又は前足に
接触することを含みうる。動きが、コマンドに対応するジェスチャとして誤解釈される尤
度を低減するべく、システムは、第1のジェスチャが、システムを「有効」モードに配置
し、且つ、有効モードにある際に受け取られた第2ジェスチャが、コマンドジェスチャと
して解釈されるという、複数のステージを利用することができる。
【0009】
図1~図2には、靴などのフットウェアが、例として示されており、これは、総体とし
て、参照符号100によって表記されている。フットウェア100は、例えば、様々なタ
イプの運動靴を含む、多くの異なる形態を有することができる。例示用の一実施形態にお
いては、靴100は、一般に、ユニバーサル通信ポート14に動作自在に接続された力及
び/又は圧力センサシステム12を含む。更に詳細に後述するように、センサシステム1
2は、靴100の着用者に関係する性能データを収集している。ユニバーサル通信ポート
14に対する接続を通じて、複数の異なるユーザが、更に詳細に後述する様々な異なる使
用法のために、性能データにアクセスすることができる。
【0010】
フットウェアの物品100は、図1~図2においては、表甲120と、足底構造130
と、を含むものとして示されている。以下の説明における参照を目的として、フットウェ
ア100は、図1に示されているように、前足領域111、中足領域112、及び踵領域
113、という3つの総合的領域に分割することができる。領域111~113は、フッ
トウェア100のエリアの境界を正確に画定することを意図したものではない。むしろ、
領域111~113は、以下の説明における枠組みを提供するフットウェア100の総合
的エリアを表すことを意図している。領域111~113は、一般的に、フットウェア1
00に対して適用されるが、領域111~113に対する参照は、具体的には、表甲12
0に対しても、足底構造130に対しても、或いは、表甲120又は足底構造130に含
まれている、且つ/又は、その一部分として形成されている、個々のコンポーネントに対
しても、適用される場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
シューズ
3日前
個人
履物
12か月前
個人
履物
5か月前
個人
靴用装着物
2か月前
山三商事株式会社
靴
5か月前
個人
インソール
8か月前
リトルピアニスト株式会社
履物
11か月前
個人
靴紐用テンションガイド
10か月前
株式会社KTC
インソールおよび履物
4か月前
個人
靴底及び該靴底を備えた靴
7か月前
美津濃株式会社
シューズのソール
11か月前
株式会社フォーナインシューズ
靴
3か月前
美津濃株式会社
シューズのソール
10日前
株式会社ATN1
中敷き及び履物
7か月前
個人
履物
7か月前
株式会社ゴールドウイン
シューズ
9か月前
個人
防滑シート及びその製造方法
1か月前
個人
履物
7か月前
株式会社アシックス
靴
11か月前
徳武産業株式会社
履物
4か月前
株式会社アメイズプラス
履物
7か月前
株式会社アメイズプラス
履物
8か月前
糸伍株式会社
靴紐
3か月前
株式会社ダイマツ
履物及び短靴用月型芯
9か月前
個人
履物用中敷
7か月前
デサントジャパン株式会社
子供用靴
7か月前
株式会社チャナカンパニー
シューキーパー
1か月前
株式会社フォーカルワークス
靴の中底と靴
9か月前
株式会社アシックス
シューズ
25日前
高笙工業有限公司
紐用リール
5か月前
ゼンノ株式会社
履物
8か月前
株式会社アシックス
靴底
25日前
株式会社馬里奈
履物
6か月前
株式会社アシックス
ソール
6か月前
なごり株式会社
インソール及び履物
3か月前
株式会社アシックス
靴
10か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ