TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025054295
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2024166279
出願日
2024-09-25
発明の名称
ロール再配向機構およびグラップル機構を備えたロボットアーム
出願人
マクドナルド・デトワイラー・アンド・アソシエイツ・インコーポレイテッド
代理人
個人
,
個人
,
個人
主分類
B25J
15/10 20060101AFI20250328BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
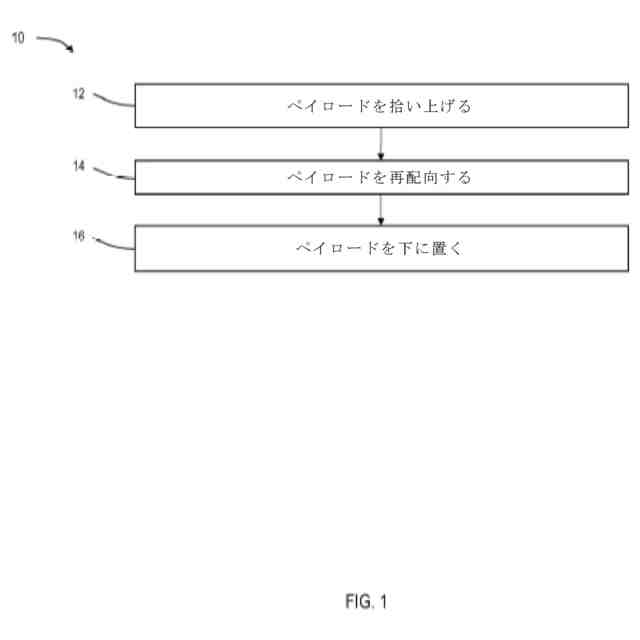
【課題】軽量で、収納可能であり、ペイロード操作のための能動自由度がより小さい、新規のロボットアームを提供すること。
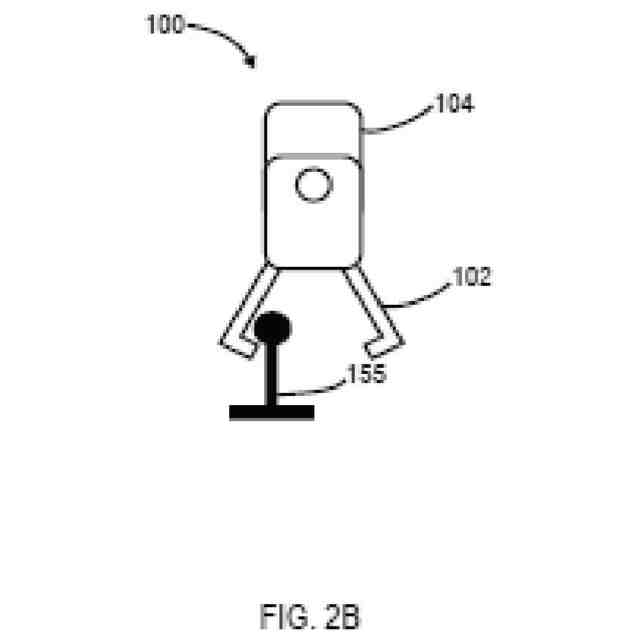
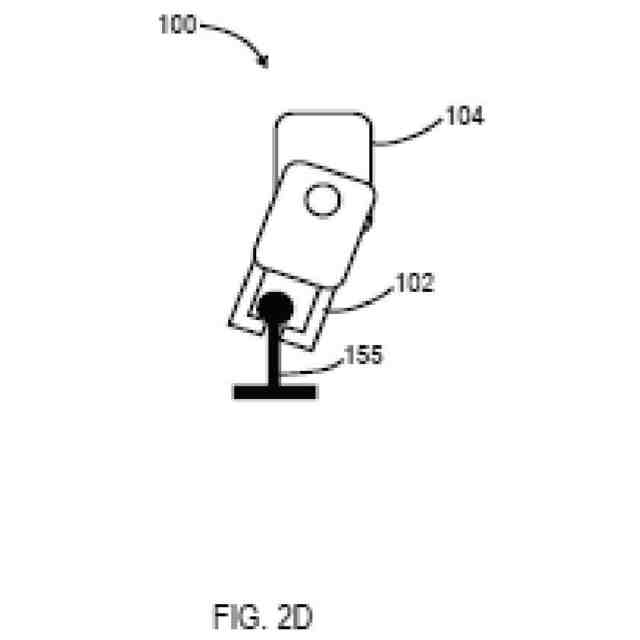
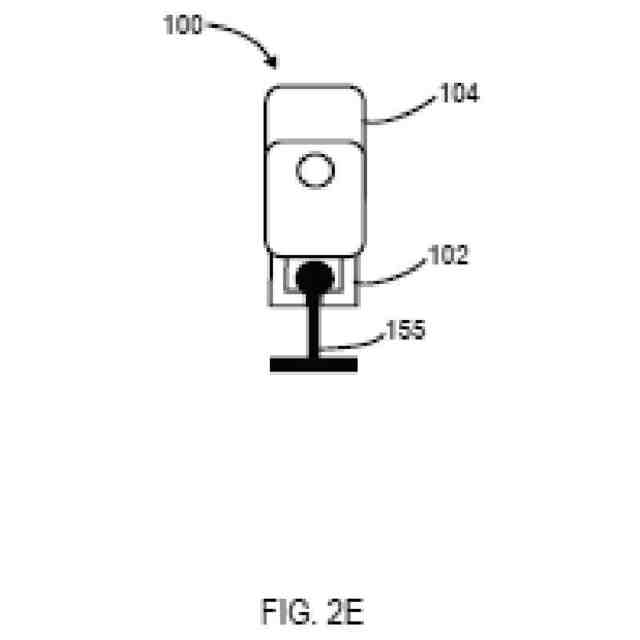
【解決手段】ロボットアームが、能動駆動型ジョイントによって接続されて、腕のショルダ部、肘部、および手首部においてピッチおよびヨー制御を実現するブームを有する機械的アームアセンブリを含む。アームの端部での能動ロールおよび/またはヨー制御用のフォースモーメントセンサおよび/またはアクチュエータが省略される。配向機構は、グラップル機構を枢動させて、ペイロードの軸と合わせるようにエンドエフェクタを能動的に配置する必要なくペイロードを握持するように、受動ピッチおよびヨー制御を備えたグラップル機構をもたらす。ペイロードを持ち上げる前に、グラップル固定具は、グラップル機構を完全に格納することによって、剛体化される。
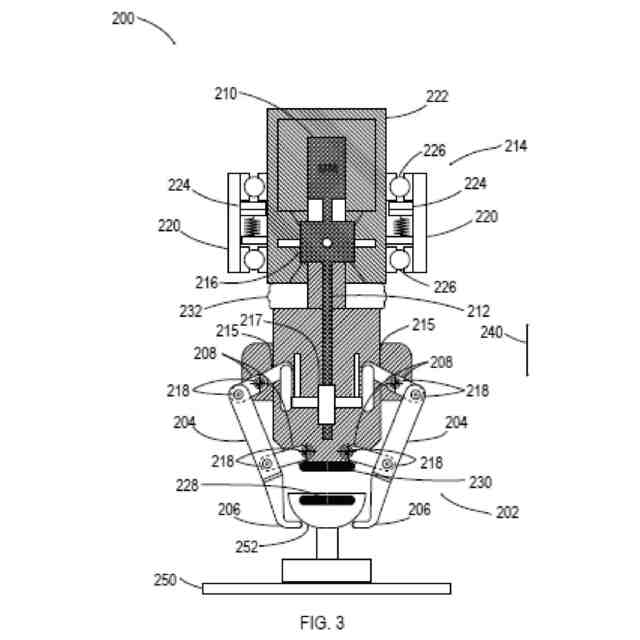
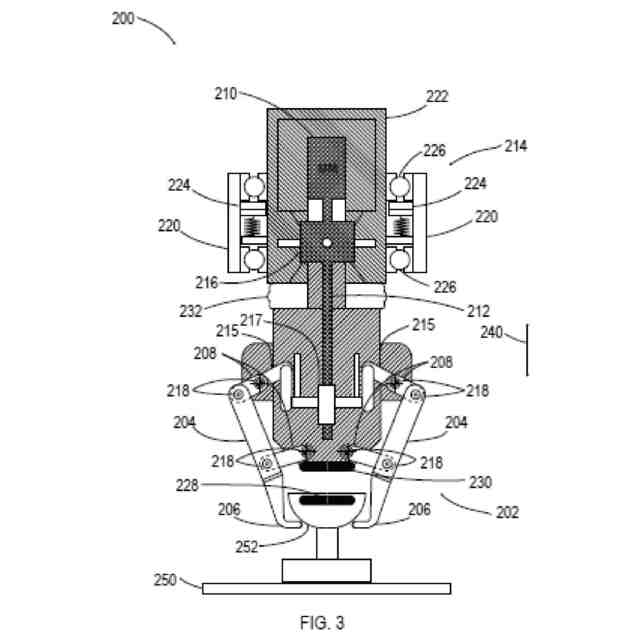
【選択図】図3
特許請求の範囲
【請求項1】
ペイロードを握持するための能動駆動型グラップル機構と、
前記グラップル機構に、ピッチ、ヨー、および後方駆動ロールの自由度をもたらすための配向機構と、
を含む、ロボットアーム用のエンドエフェクタ。
続きを表示(約 1,500 文字)
【請求項2】
前記グラップル機構は、
線形駆動システムと、
前記ペイロードを握持するための少なくとも2つの鉤爪であって、各鉤爪が前記線形駆動システムへのリンク機構を含む、少なくとも2つの鉤爪と、
を含み、
前記リンク機構は、前記駆動システムからの線形動作を、各鉤爪を広げるかまたは格納するように変換する、
請求項1に記載のエンドエフェクタ。
【請求項3】
前記配向機構は、
前記グラップル機構に受動ピッチおよびヨーをもたらすための、前記グラップル機構に接続されている回転ジョイントと、
前記エンドエフェクタに後方駆動ロール自由度をもたらすための圧力プレートアセンブリと、
を含む、請求項1に記載のエンドエフェクタ。
【請求項4】
前記回転ジョイントと前記圧力プレートアセンブリとは、埃から保護するために封止される、請求項3に記載のエンドエフェクタ。
【請求項5】
前記グラップル機構は、
モータによって駆動されるボールねじと、
前記ペイロードを握持するための少なくとも2つの鉤爪であって、各鉤爪は、4節リンク機構、および前記ボールねじに接続されている延長リンクを含む、少なくとも2つの鉤爪と、
を含み、
前記延長リンクは、前記ボールねじの線形動作を伝達して、前記4節リンク機構の従動リンクを回転させて、各鉤爪を広げるかまたは格納する、
請求項1に記載のエンドエフェクタ。
【請求項6】
能動駆動型ジョイントによって接続されているブームであって、前記能動駆動型ジョイントは、前記ロボットアームに少なくとも3自由度をもたらす、ブームを含む、機械的アームアセンブリと、
請求項1から5のいずれか一項に記載のエンドエフェクタと、
を含む、ロボットアーム。
【請求項7】
グラップル機構は、
モータによって駆動されるボールねじと、
ペイロードを握持するための少なくとも2つの鉤爪であって、各鉤爪は、4節リンク機構、および前記ボールねじに接続されている延長リンクを含む、少なくとも2つの鉤爪と、
を含み、
前記延長リンクは、前記ボールねじの線形動作を伝達して、前記4節リンク機構の従動リンクを回転させて、各鉤爪を広げるかまたは格納する、
請求項6に記載のロボットアーム。
【請求項8】
前記能動駆動型ジョイントは、埃から保護するために封止される、請求項6に記載のロボットアーム。
【請求項9】
前記エンドエフェクタおよびペイロードを視認するために配置されている少なくとも1つのカメラをさらに含む、請求項6に記載のロボットアーム。
【請求項10】
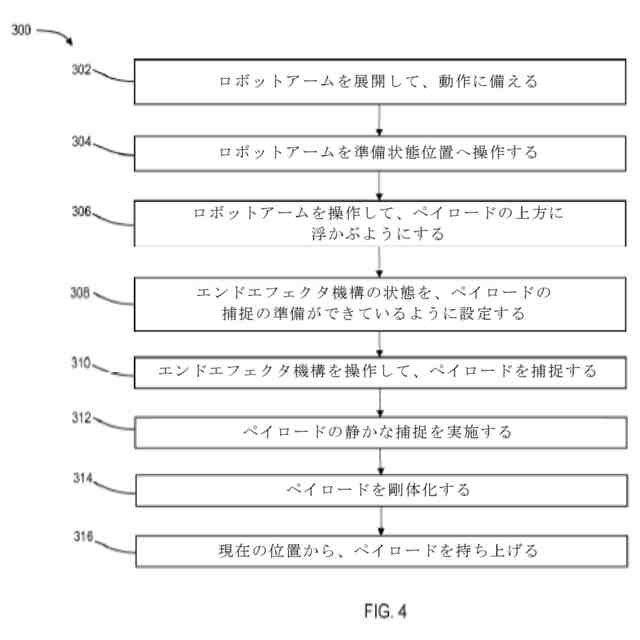
ロボットアームによってペイロードを操作する方法であって、
前記ロボットアームを、前記ペイロードに対して、接近準備状態位置へ操作するステップと、
前記ロボットアームを操作して、前記ペイロードの上方に空中静止するようにするステップと、
前記ペイロードを捕捉するために、エンドエフェクタグラップル機構の状態を設定するステップと、
前記エンドエフェクタグラップル機構を操作して、前記ペイロードを捕捉するステップと、
前記ペイロードの柔らかな捕捉を実施するステップと、
前記ペイロードを剛体化するステップと、
現在の位置から、前記ペイロードを持ち上げるステップと、
を含む、方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書において開示されている実施形態は、物体を持ち上げるためのロボットアーム、詳細には、ペイロード操作のための受動配向機構および能動配向機構ならびにグラップル機構を備えたロボットアームに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
遠隔操作ロボットアームには、地球上で、宇宙空間内で、天体上で、多数の用途がある。宇宙用途では、ロボットアームは、通常、乗り物(例えば、宇宙船、宇宙ステーション、惑星探査機)上に取り付けられており、様々なタスクを実施する。例として、宇宙ステーション上のロボットアームは、軌道上のペイロード(例えば、貨物モジュール)を握持するのに使用され得る。別の例は、月面上でペイロード(例えば、表土サンプル)を拾い上げ、移送する、惑星探査機上でのロボットアームの使用である。
【0003】
アームおよびそれが取り付けられる乗り物が軌道へ打ち上げられなければならないので、宇宙用途のためのロボットアームを設計する場合、質量が重要な考慮すべき事項である。より重い積み荷を軌道に乗せるには、全体的な質量をさらに増大させるより多くの燃料が搬送される必要がある。
【0004】
別の考慮すべき事項が、ロボットアームに可能な移動範囲である。該移動範囲はアームの自由度(ピッチ、ロール、ヨー)として表される。少なくとも6自由度が可能である(すなわち、X、Y、Z全方向の移動が可能である)ロボットアームを有することが望ましい可能性があるが、より高い自由度が、ロボットアームのピッチ、ロール、およびヨーを駆動するより多くの構成要素を必要とし、したがってアームのコスト、重量、および複雑さを増大させる。
【0005】
別の課題が、ペイロードがロボットアームによって操作される時、該ペイロードに掛けられる荷重を管理することである。通常、ロボットアームは、ペイロードに掛けられる力を測定するフォースモーメントセンサ(すなわち、触覚センサ)を含む。しかし、センサも重量および複雑さを増大させる。
【0006】
サイズは、さらなる考慮すべき事項である。宇宙船または打ち上げ機内の積荷スペースは、限られている。したがって、カナダアーム(Canadarm)(登録商標)などの、宇宙用途のためのロボットアームは、軌道に乗せるための収納形態内にひとまとめに詰められることが可能である、関節運動可能な部分を備えて構築される。しかし、アームの収納接触面がアームの自由度を最終的に制約する可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0007】
したがって、軽量で、収納可能であり、ペイロード操作のための能動自由度がより小さい、地球用途および宇宙用途のための新規のロボットアームが必要である。
【課題を解決するための手段】
【0008】
ペイロード操作のための、受動配向機構および能動配向機構ならびにグラップル機構を備えたロボットアームが提供されている。
【0009】
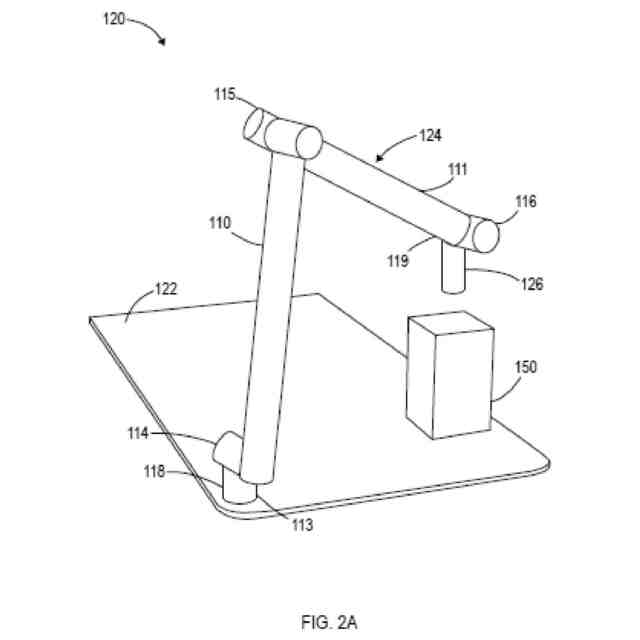
いくつかの実施形態によれば、ペイロード操作用のロボットアームが存在する。該ロボットアームは機械的アームアセンブリとエンドエフェクタとを含む。該機械的アームアセンブリは、能動駆動型ジョイントによって接続されているブームを含む。該能動駆動型ジョイントは、ロボットアームに少なくとも3自由度をもたらす。
【0010】
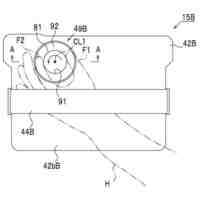
エンドエフェクタは、ペイロードを握持するための能動駆動型グラップル機構と、該グラップル機構に、ピッチ、ヨー、および後方駆動ロール自由度をもたらすための配向機構と、を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
5日前
個人
けがき用治具
28日前
株式会社不二越
ロボット
26日前
個人
深孔スリーブ駆動ロッド構造
18日前
株式会社エビス
腰ベルト用連結具
5日前
株式会社不二越
ロボット操作装置
25日前
川崎重工業株式会社
ロボット
26日前
株式会社デンソー
操縦桿
26日前
個人
バール
18日前
株式会社黒澤鉄工製作所
けがき用治具
28日前
工機ホールディングス株式会社
作業機
13日前
梅馨堂合同会社
人協働ロボットシステム
20日前
ARMA株式会社
UI付エンドエフェクタ
21日前
株式会社デンソーウェーブ
ロボット制御システム
11日前
若井ホールディングス株式会社
レンチ構造とその製造方法
28日前
株式会社マキタ
作業機
25日前
学校法人法政大学
装着型アシスト装置
15日前
アピュアン株式会社
エアー式衝撃工具
8日前
三菱電機株式会社
トルク締め個所検出システム
18日前
株式会社マキタ
インパクト工具
6日前
高丸工業株式会社
ロボット操作システムの動作方法
18日前
株式会社マキタ
インパクト工具
6日前
中国電力株式会社
電動ドライバー
12日前
シブヤパッケージングシステム株式会社
物品移載装置
26日前
株式会社不二越
ロボットの教示システム及び教示方法
12日前
SB C&S株式会社
治具セット
5日前
株式会社デンソー
作業装置および作業プログラム
26日前
オムロン株式会社
モバイルロボット
12日前
JUKI株式会社
ハンドリング装置
20日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
8日前
株式会社ベッセル工業
インパクト工具
26日前
株式会社デンソー
解体装置および解体プログラム
26日前
オムロン株式会社
モバイルロボット
12日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
12日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
12日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ