TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025051612
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2024149044
出願日
2024-08-30
発明の名称
レーザ加工装置及びレーザ加工方法
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人前田特許事務所
主分類
B23K
26/03 20060101AFI20250327BHJP(工作機械;他に分類されない金属加工)
要約
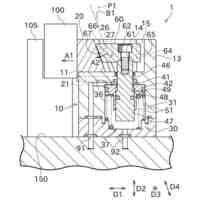
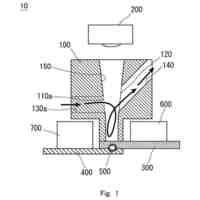
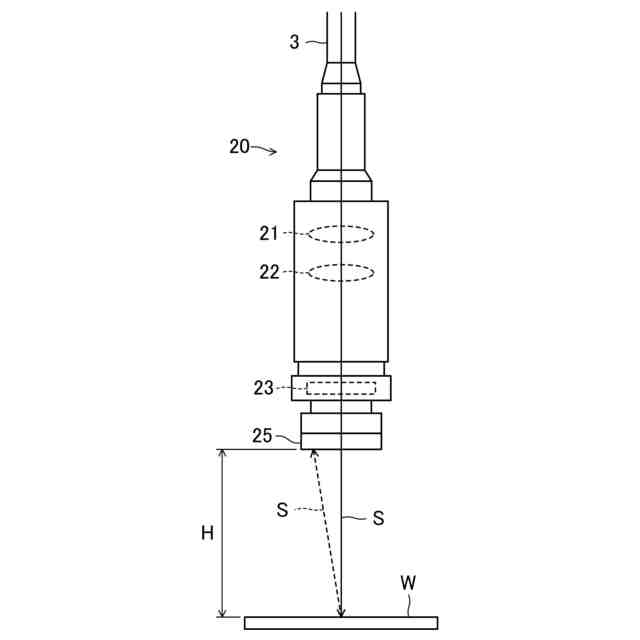
【課題】レーザヘッドとワークとの間の距離を容易に測定できるようにする。
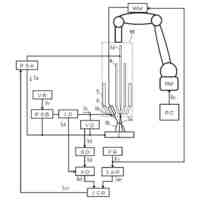
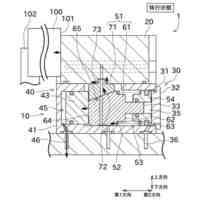
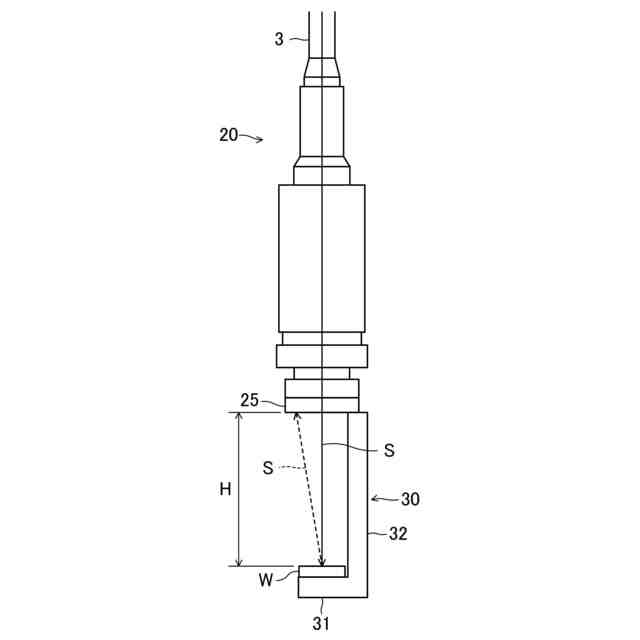
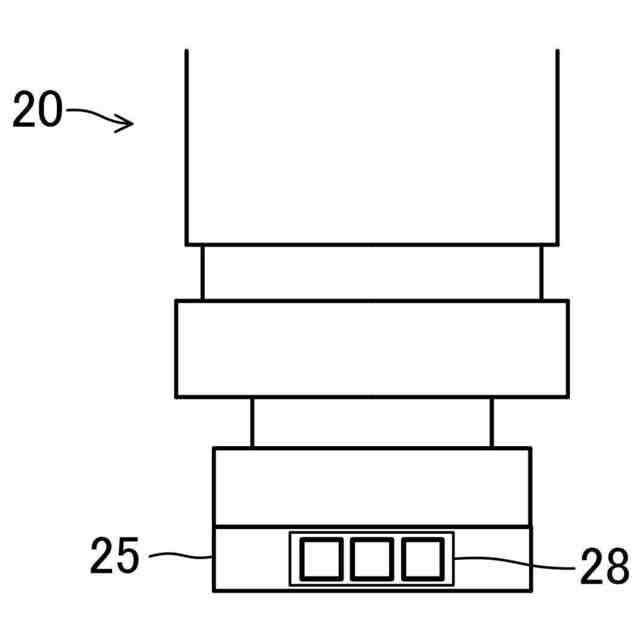
【解決手段】レーザヘッド20には、検出部25が設けられる。検出部25は、ワークWで反射した測定光Sを検出する。演算部11は、レーザヘッド20から出射された測定光Sが検出部25で検出されるまでの検出時間に基づいて、レーザヘッド20とワークWとの間の距離を演算する。
【選択図】図2
特許請求の範囲
【請求項1】
ワークに対して加工用のレーザ光を出射するレーザヘッドを備えたレーザ加工装置であって、
前記レーザヘッドは、前記レーザ光とは波長の異なる測定光を、前記レーザ光の出射方向に沿って出射可能に構成され、
前記レーザヘッドに設けられ、前記ワークで反射した前記測定光を検出する検出部と、
前記レーザヘッドから出射された前記測定光が前記検出部で検出されるまでの検出時間に基づいて、前記レーザヘッドと前記ワークとの間の距離を演算する演算部と、を備える
レーザ加工装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1のレーザ加工装置において、
前記レーザヘッドに着脱可能に設けられ、前記レーザヘッドの出射端から所定距離離れた位置で前記ワークを保持するワーク保持部を備える
レーザ加工装置。
【請求項3】
請求項1のレーザ加工装置において、
前記ワークに対する前記レーザヘッドの位置を変更するロボットを備え、
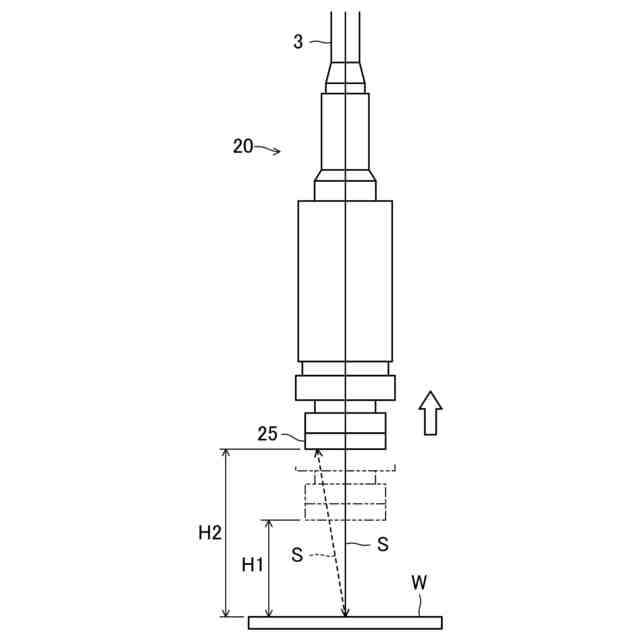
前記ロボットは、前記ワークに対向する第1高さ位置と、前記第1高さ位置よりも前記ワークから離れた第2高さ位置と、の間で前記レーザヘッドを移動させ、
前記検出部は、前記第1高さ位置及び前記第2高さ位置において、前記測定光をそれぞれ検出し、
前記演算部は、前記第1高さ位置及び前記第2高さ位置において、前記測定光が前記検出部で検出されるまでの第1検出時間及び第2検出時間に基づいて、前記レーザヘッドと前記ワークとの間の第1距離及び第2距離を演算する
レーザ加工装置。
【請求項4】
請求項1~3の何れか1つのレーザ加工装置において、
前記ワークの材質と、前記検出時間と、前記レーザヘッドと前記ワークとの間の距離と、の関係を示すテーブルを記憶する記憶部を備える
レーザ加工装置。
【請求項5】
請求項1~3の何れか1つのレーザ加工装置において、
前記ワークに対する前記レーザヘッドの位置を変更するロボットと、
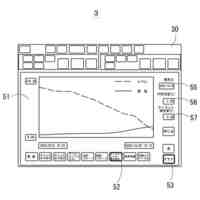
前記ロボットの操作を行うティーチングペンダントと、
前記レーザヘッドに設けられた表示部と、を備え、
前記演算部で演算された前記距離を示す情報は、前記表示部及び前記ティーチングペンダントの操作画面の少なくとも一方に表示される
レーザ加工装置。
【請求項6】
請求項1~3の何れか1つのレーザ加工装置において、
前記ワークに対する前記レーザヘッドの位置を変更するロボットを備え、
前記ロボットは、前記レーザヘッドを水平方向に移動させ、
前記検出部は、前記レーザヘッドが水平方向に移動している間に、前記ワーク上の複数の位置においてそれぞれ前記測定光を検出し、
前記演算部は、前記複数の位置における前記レーザヘッドと前記ワークとの間の複数の距離を演算する
レーザ加工装置。
【請求項7】
請求項1~3の何れか1つのレーザ加工装置において、
前記検出部は、
前記レーザヘッドから着脱可能に備えられており、
前記測定光の出射時は、前記レーザヘッドに装着してあり、
前記レーザ光の出射時は、前記レーザヘッドから取り外されている
レーザ加工装置。
【請求項8】
レーザヘッドからワークに対して、加工用のレーザ光とは波長の異なる測定光を、前記レーザ光の出射方向に沿って出射する工程と、
前記レーザヘッドに設けられた検出部によって、前記ワークで反射した前記測定光を検出する工程と、
前記レーザヘッドから出射された前記測定光が前記検出部で検出されるまでの検出時間に基づいて、前記レーザヘッドと前記ワークとの間の距離を演算する工程と、を備える
レーザ加工方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、レーザ加工装置及びレーザ加工方法に関するものである。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
特許文献1には、レーザヘッドを上下方向に移動させ、表示器上に表示された測定光の反射光をクロスターゲットに一致させることで、レーザヘッドとワークとの間の距離を、最適焦点位置にティーチングできるようにしたレーザ加工方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2000-042775号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1の発明では、測定光を、レーザ光の光軸に対して所定角度傾斜させてワークに出射しているため、測定動作中に不具合が生じるおそれがある。
【0005】
具体的に、図9に示すように、ワークWを押さえ付けるための治具101が、測定動作中に測定光Sの出射軌跡上に入り込むおそれがある。この場合、測定光SがワークWに到達する前に、測定光Sが治具101によって遮断されてしまい、レーザヘッド100とワークWとの間の距離を測定できないおそれがある。
【0006】
本発明は、かかる点に鑑みてなされたものであり、その目的は、レーザヘッドとワークとの間の距離を容易に測定できるようにすることにある。
【課題を解決するための手段】
【0007】
第1の発明は、ワークに対して加工用のレーザ光を出射するレーザヘッドを備えたレーザ加工装置であって、前記レーザヘッドは、前記レーザ光とは波長の異なる測定光を、前記レーザ光の出射方向に沿って出射可能に構成され、前記レーザヘッドに設けられ、前記ワークで反射した前記測定光を検出する検出部と、前記レーザヘッドから出射された前記測定光が前記検出部で検出されるまでの検出時間に基づいて、前記レーザヘッドと前記ワークとの間の距離を演算する演算部と、を備える。
【0008】
第1の発明では、レーザヘッドとワークとの間の距離を測定するのに用いる測定光を、加工用のレーザ光の出射方向に沿って出射するようにしている。これにより、測定光を、レーザ光の光軸とは別の角度からワークに出射した場合に生じる不具合を抑えることができる。
【0009】
具体的に、レーザ光の光軸とは別の角度からワークに対して測定光を出射した場合、ワークを押さえ付けるための治具が、測定光の出射軌跡上に入り込んで測定光が遮断されてしまうおそれがある。
【0010】
これに対し、レーザ光の出射方向に沿って測定光を出射可能な構成とすれば、測定光が治具によって遮断されるという不具合が発生することはなく、レーザヘッドとワークとの間の距離を容易に測定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
ねじ締め機
今日
日東精工株式会社
ねじ締め装置
28日前
有限会社 ナプラ
金属粒子
23日前
株式会社FUJI
工作機械
3日前
日東精工株式会社
多軸ねじ締め機
今日
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
積層造形溶接方法
1か月前
株式会社ナベヤ
締結装置
1か月前
株式会社FUJI
チャック装置
13日前
ブラザー工業株式会社
工作機械
1日前
ブラザー工業株式会社
工作機械
1日前
大和ハウス工業株式会社
溶接方法
29日前
津田駒工業株式会社
2連回転割出し装置
23日前
オークマ株式会社
工作機械
22日前
オークマ株式会社
工作機械
1か月前
株式会社不二越
管用テーパタップ
2日前
株式会社コスメック
クランプ装置
17日前
オークマ株式会社
診断装置
1か月前
株式会社コスメック
クランプ装置
8日前
ビアメカニクス株式会社
レーザ加工装置
今日
株式会社プロテリアル
金属箔の溶接方法
今日
豊田鉄工株式会社
レーザー溶接装置
24日前
スター精密株式会社
工作機械
28日前
オーエスジー株式会社
ドリル
9日前
トヨタ自動車株式会社
レーザ加工機
14日前
株式会社恵信工業
アプセット溶接方法
16日前
株式会社マキタ
ジグソー
17日前
エンシュウ株式会社
摩擦撹拌接合装置
8日前
株式会社恵信工業
アプセット溶接方法
9日前
宮川工機株式会社
プレカット加工装置
9日前
株式会社プロテリアル
クラッド材の製造方法
23日前
株式会社ダイヘン
サブマージアーク溶接装置
14日前
アサダ株式会社
バンドソー装置
13日前
株式会社プロテリアル
クラッド材の製造方法
23日前
アサダ株式会社
バンドソー装置
13日前
トヨタ自動車株式会社
グラフ生成方法
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ