TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025038696
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145457
出願日
2023-09-07
発明の名称
車線維持支援装置
出願人
スズキ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B62D
6/00 20060101AFI20250312BHJP(鉄道以外の路面車両)
要約
【課題】車両特性または周辺環境による影響を抑制しながら、最大横加速度を超えないように精度よく横加速度を制御することができる車線維持支援装置を提供する。
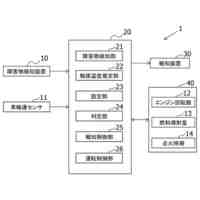
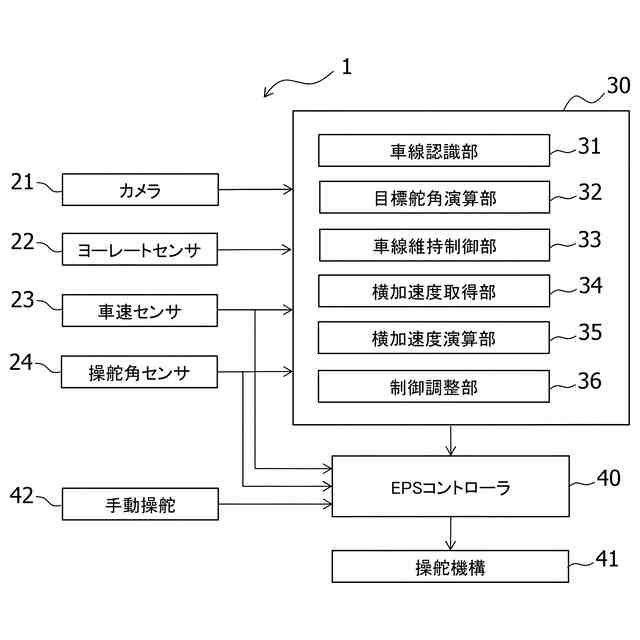
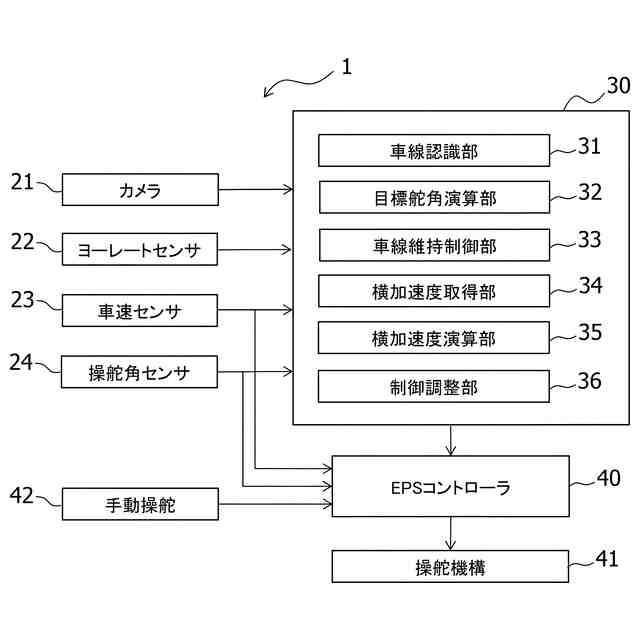
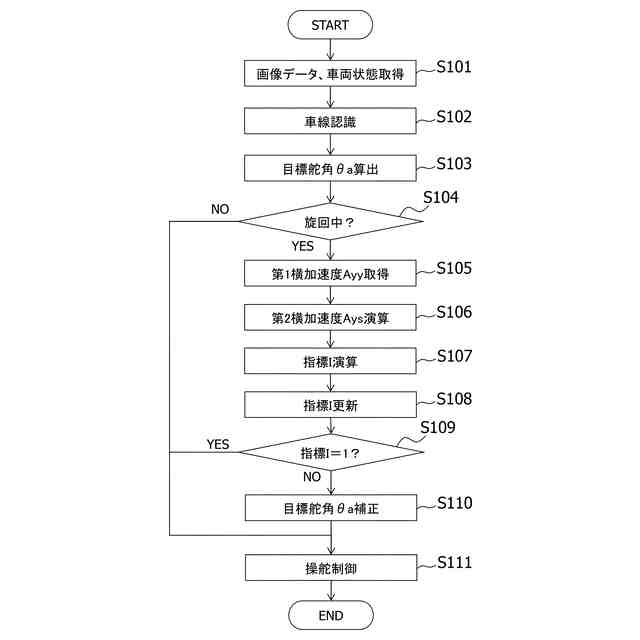
【解決手段】車線維持支援装置1は、車両が走行している車線を認識する車線認識部31と、前記車線内の目標経路に追従するための目標舵角θaを演算する目標舵角演算部32と、前記車両の前記車線内の走行を維持するように、かつ予め設定された最大横加速度を超えないように、前記目標舵角θaに基づいて操舵制御を行う車線維持制御部33と、前記車両に発生している横加速度を第1横加速度Ayyとして取得する横加速度取得部34と、操舵角センサ24から入力される操舵角に基づく横加速度を第2横加速度Aysとして演算する横加速度演算部35と、前記第1横加速度Ayyと前記第2横加速度Aysとを比較し、比較結果を表す指標Iに基づいて前記操舵制御の調整を行う制御調整部36とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
車両が走行している車線を認識する車線認識部と、
前記車線内の目標経路に追従するための目標舵角を演算する目標舵角演算部と、
前記車両の前記車線内の走行を維持するように、かつ予め設定された最大横加速度を超えないように、前記目標舵角に基づいて操舵制御を行う車線維持制御部と、
前記車両に発生している横加速度を第1横加速度として取得する横加速度取得部と、
操舵角センサから入力される操舵角に基づく横加速度を第2横加速度として演算する横加速度演算部と、
前記第1横加速度と前記第2横加速度とを比較し、比較結果を表す指標に基づいて前記操舵制御の調整を行う制御調整部と
を備える、車線維持支援装置。
続きを表示(約 670 文字)
【請求項2】
前記制御調整部は、前記比較結果を表す前記指標として前記第1横加速度に対する前記第2横加速度の割合を算出する、請求項1に記載の車線維持支援装置。
【請求項3】
前記制御調整部は、前記指標が1ではない場合に、前記指標を1に近づけるように前記目標舵角を調整するように構成されている、請求項2に記載の車線維持支援装置。
【請求項4】
前記制御調整部は、前記目標舵角の調整量に対する重み付けのための可変の係数を設定するように構成されている、請求項3に記載の車線維持支援装置。
【請求項5】
前記制御調整部は、
前記指標の変化速度を算出し、
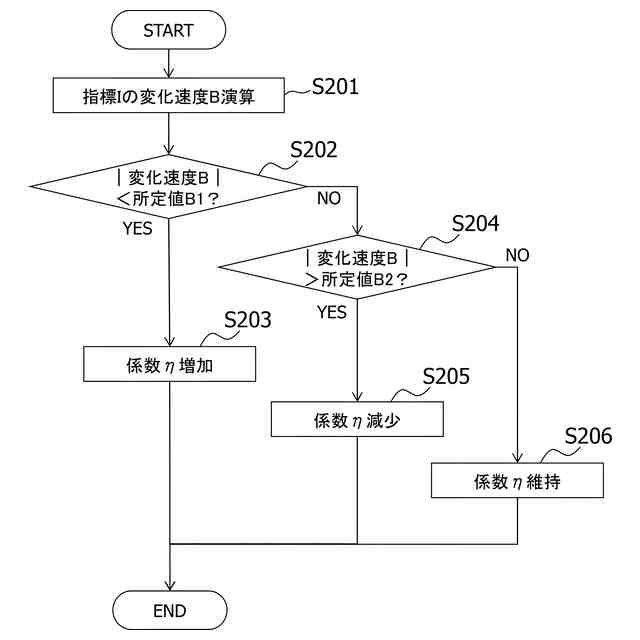
前記指標の変化速度に応じて前記係数を変更する、請求項4に記載の車線維持支援装置。
【請求項6】
前記制御調整部によって算出される前記指標は、前記車両の左旋回中における前記第1横加速度に対する前記第2横加速度の割合である左旋回指標と、前記車両の右旋回中における前記第1横加速度に対する前記第2横加速度の割合である右旋回指標とを含み、
前記制御調整部は、前記係数として、前記左旋回指標の変化速度に応じた左旋回係数と、前記右旋回指標の変化速度に応じた右旋回係数とをそれぞれ設定する、請求項5に記載の車線維持支援装置。
【請求項7】
前記制御調整部は、前記車両が旋回走行している場合に前記操舵制御の調整を行うように構成されている、請求項1から6のいずれか一項に記載の車線維持支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車線維持支援装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
車両の車線中央付近の走行を支援する車線維持支援装置が知られている。例えば特許文献1には、車両の走行位置が、左右の白線の中央位置となる目標走行ラインに沿って車両が走行するように舵角を変更することにより、運転者の操舵操作を支援する運転支援装置が開示されている。特許文献1に記載の装置においては、車線維持制御中に車両の横加速度が最大横加速度を超えないように舵角を制御するように構成され、目標走行ラインの曲率と車両の現在の速度とに基づいて車線維持制御を実行した場合に生じる横加速度を推定して、車両の横加速度が最大横加速度を超えることが予測できる場合、警報を発生するように構成されている。
【先行技術文献】
【特許文献】
【0003】
特許6686873号
【発明の概要】
【発明が解決しようとする課題】
【0004】
車線維持制御を実行する際は、国際基準に従って予め最大横加速度が設定され、旋回時に発生する横加速度が最大横加速度を超えないように制御することが要求される。車両に発生する横加速度は、例えば車両重量、タイヤの空気圧などを含む車両特性、および周辺環境によって影響を受けることから、車線維持制御中に車両特性または周辺環境に影響を受けることなく、横加速度を精度よく制御することが望まれている。
【0005】
本発明は、上記のような実状に鑑みてなされたものであり、その目的は、車線維持制御において、車両特性または周辺環境による影響を抑制しながら、最大横加速度を超えないように精度よく横加速度を制御することができる車線維持支援装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、車線維持支援装置は、車両が走行している車線を認識する車線認識部と、前記車線内の目標経路に追従するための目標舵角を演算する目標舵角演算部と、前記車両の前記車線内の走行を維持するように、かつ予め設定された最大横加速度を超えないように、前記目標舵角に基づいて操舵制御を行う車線維持制御部と、前記車両に発生している横加速度を第1横加速度として取得する横加速度取得部と、操舵角センサから入力される操舵角に基づく横加速度を第2横加速度として演算する横加速度演算部と、前記第1横加速度と前記第2横加速度とを比較し、比較結果を表す指標に基づいて前記操舵制御の調整を行う制御調整部とを備える。
【発明の効果】
【0007】
本発明に係る車線維持支援装置は、車線維持制御において最大横加速度を超えないように精度よく横加速度を制御することができる。
【図面の簡単な説明】
【0008】
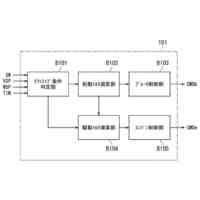
図1は、本発明の一実施の形態における車線維持支援装置の概略構成を示すブロック図である。
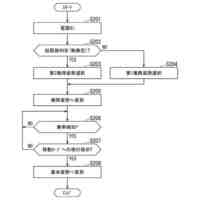
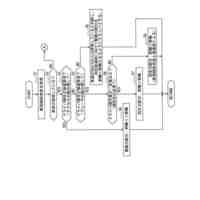
図2は、一実施の形態における車線維持制御の流れを示すフローチャートである。
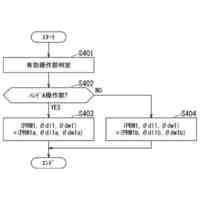
図3は、重み付け係数の設定について説明するフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の第1の実施の形態に係る車線維持支援装置について、図面を参照しながら詳細に説明する。図1は、本実施の形態における車線維持支援装置の概略構成を示すブロック図である。車線維持支援装置は、車両に搭載されて運転者の運転操作を支援するものであり、車両が車線中央付近を維持して走行するように操舵制御を行うように構成されている。
【0010】
図1に示すように、車線維持支援装置1は、車両の前方領域を検知する前方検知手段としてのカメラ21、車両のヨーレートγを検出するヨーレートセンサ22、車両の速度(車速)Vを検出する車速センサ23、および車両の操舵角(前輪舵角)δを検出する操舵角センサ24等を備えている。車線維持支援装置1は、さらに、制御装置30、およびEPS(電動パワーステアリング)コントローラ40等を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
スズキ株式会社
船外機
9日前
スズキ株式会社
船外機
9日前
スズキ株式会社
移動体
1か月前
スズキ株式会社
移動体
1か月前
スズキ株式会社
移動体
1か月前
スズキ株式会社
移動体
1か月前
スズキ株式会社
車体構造
1か月前
スズキ株式会社
車両構造
1か月前
スズキ株式会社
車両構造
1か月前
スズキ株式会社
鞍乗型車両
2日前
スズキ株式会社
鞍乗型車両
1か月前
スズキ株式会社
鞍乗型車両
1か月前
スズキ株式会社
鞍乗型車両
1か月前
スズキ株式会社
鞍乗型車両
1か月前
スズキ株式会社
鞍乗型車両
1か月前
スズキ株式会社
鞍乗型車両
2日前
スズキ株式会社
鞍乗型車両
2日前
スズキ株式会社
車両制御装置
1か月前
スズキ株式会社
車両前部構造
1日前
スズキ株式会社
車両前部構造
1日前
スズキ株式会社
可変動弁装置
1か月前
スズキ株式会社
流体封止構造
1か月前
スズキ株式会社
可変動弁装置
1か月前
スズキ株式会社
車両側部構造
8日前
スズキ株式会社
車両側部構造
8日前
スズキ株式会社
可変動弁装置
1か月前
スズキ株式会社
車両の制御装置
16日前
スズキ株式会社
車両用報知装置
1か月前
スズキ株式会社
車両用報知装置
1か月前
スズキ株式会社
車両用制御装置
23日前
スズキ株式会社
車両の制御装置
1日前
スズキ株式会社
車両用制御装置
16日前
スズキ株式会社
車両の吸気構造
1か月前
スズキ株式会社
車両用制御装置
9日前
スズキ株式会社
車両用制御装置
16日前
スズキ株式会社
作業支援システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ