TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025067067
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023176745
出願日
2023-10-12
発明の名称
車両用制御装置
出願人
スズキ株式会社
代理人
弁理士法人日誠国際特許事務所
主分類
B60L
15/20 20060101AFI20250417BHJP(車両一般)
要約
【課題】車両の停車時の駆動系のガタ詰めを短時間で行うことができ、ガタ詰めに要する消費電力を低減することができる車両用制御装置を提供すること。
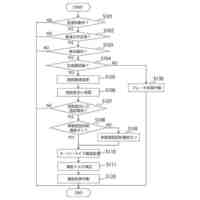
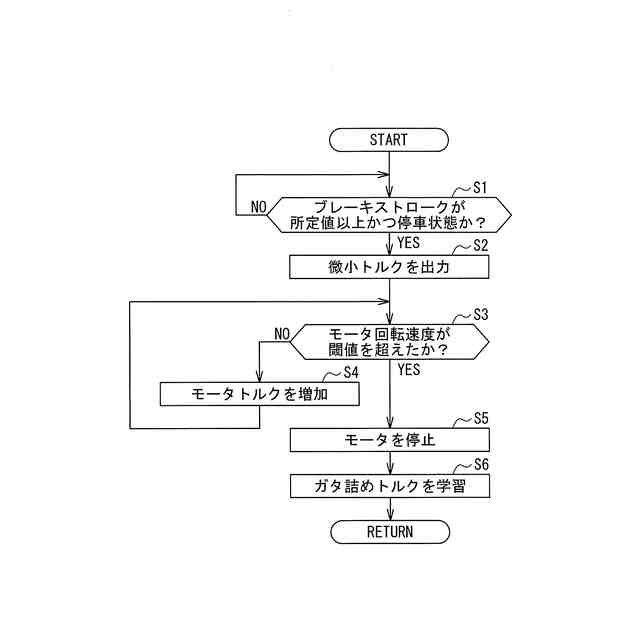
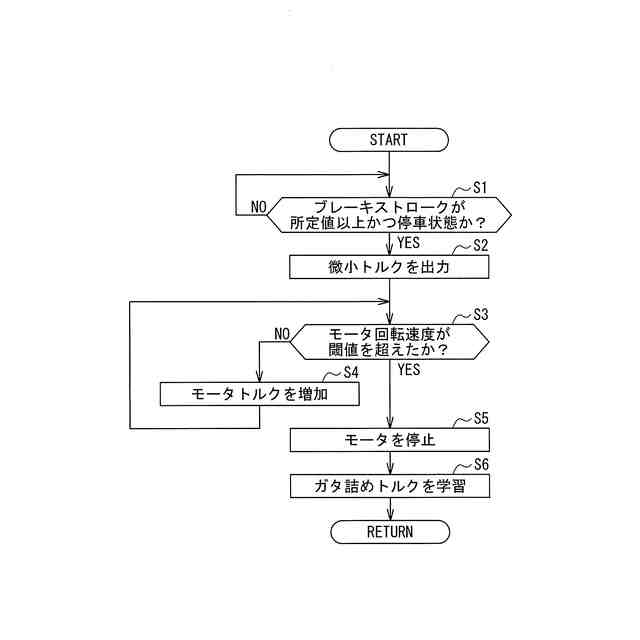
【解決手段】HCUは、ブレーキストロークが所定値以上で、かつ、車両が停車状態の場合(ステップS1でYES)、モータに所定の微小トルクを出力させる(ステップS2)。HCUは、モータ回転速度が所定の閾値を超えていない場合(ステップS3でNO)、モータトルクを増加させる(ステップS4)。HCUは、モータ回転速度が所定の閾値を超えた場合(ステップS3でYES)、モータ4を停止し(ステップS5)、出力を停止する直前のモータトルクをガタ詰めトルクを学習する(ステップS6)。
【選択図】図2
特許請求の範囲
【請求項1】
走行用のモータを備える車両に搭載され、前記モータを制御する制御部を備える車両用制御装置であって、
前記制御部は、
ブレーキ操作量が所定値以上、かつ、車両が停車状態の場合に、前記モータに所定の微小トルクから漸増するようにモータトルクを出力させるモータトルク漸増動作と、
モータトルクの漸増中に前記モータの回転速度が所定の閾値を超えた場合に、モータトルクの出力を停止する停止動作と、
出力を停止する直前のモータトルクをガタ詰めトルクとして学習する学習動作と、
前記ガタ詰めトルクの学習の完了後に、前記ブレーキ操作量が前記所定値以上、かつ、車両が停車状態の場合に、学習した前記ガタ詰めトルクを前記モータに出力させる出力動作と、を実行することを特徴とする車両用制御装置。
続きを表示(約 130 文字)
【請求項2】
前記制御部は、前記学習動作の完了後にイグニッションスイッチが再びオンにされた場合、学習済の前記ガタ詰めトルクの値を消去し、前記モータトルク漸増動作、前記停止動作、前記学習動作を再び実行することを特徴とする請求項1に記載の車両用制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両用制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に記載の車両は、車両が制動され、かつ、停止しているとき、車両の駆動系におけるガタを詰めるまで駆動力を増大させるように駆動制御を行うようになっている。
【先行技術文献】
【特許文献】
【0003】
特開2009-61856号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術にあっては、駆動系におけるガタを詰めるまで駆動力を増大させる動作を車両停止ごとに実行しているため、ガタ詰動作の完了に要する時間が長くなってしまうという問題があった。また、ガタ詰め動作の実行中は継続的に電力を消費するため、ガタ詰め動作に要する消費電力が増大してしまうという問題があった。
【0005】
そこで、本発明は、車両の停車時の駆動系のガタ詰めを短時間で行うことができ、ガタ詰めに要する消費電力を低減することができる車両用制御装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記課題を解決するため本発明は、走行用のモータを備える車両に搭載され、前記モータを制御する制御部を備える車両用制御装置であって、前記制御部は、ブレーキ操作量が所定値以上、かつ、車両が停車状態の場合に、前記モータに所定の微小トルクから漸増するようにモータトルクを出力させるモータトルク漸増動作と、モータトルクの漸増中に前記モータの回転速度が所定の閾値を超えた場合に、モータトルクの出力を停止する停止動作と、出力を停止する直前のモータトルクをガタ詰めトルクとして学習する学習動作と、前記ガタ詰めトルクの学習の完了後に、前記ブレーキ操作量が前記所定値以上、かつ、車両が停車状態の場合に、学習した前記ガタ詰めトルクを前記モータに出力させる出力動作と、を実行することを特徴とする。
【発明の効果】
【0007】
このように、本発明によれば、車両の停車時の駆動系のガタ詰めを短時間で行うことができ、ガタ詰めに要する消費電力を低減することができる。
【図面の簡単な説明】
【0008】
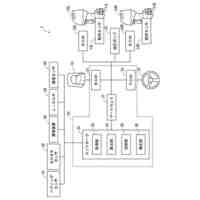
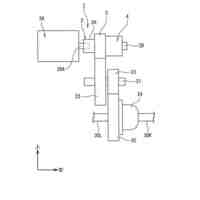
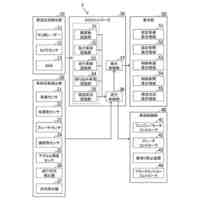
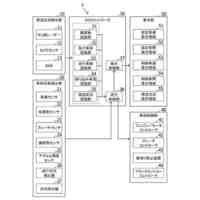
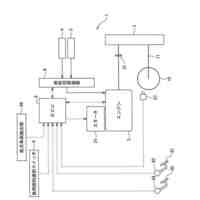
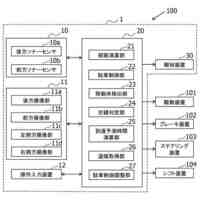
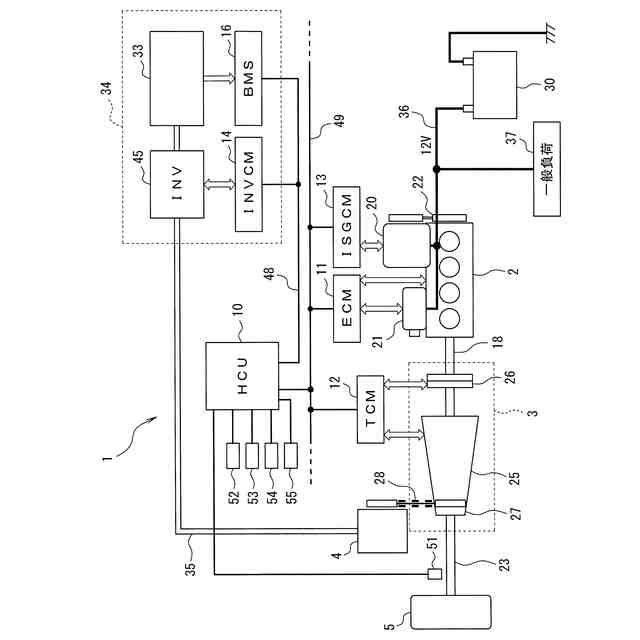
図1は、本発明の一実施例に係る車両用制御装置を備える車両の概略構成図である。
図2は、本発明の一実施例に係る車両用制御装置による学習動作の手順を示すフローチャートである。
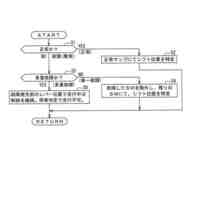
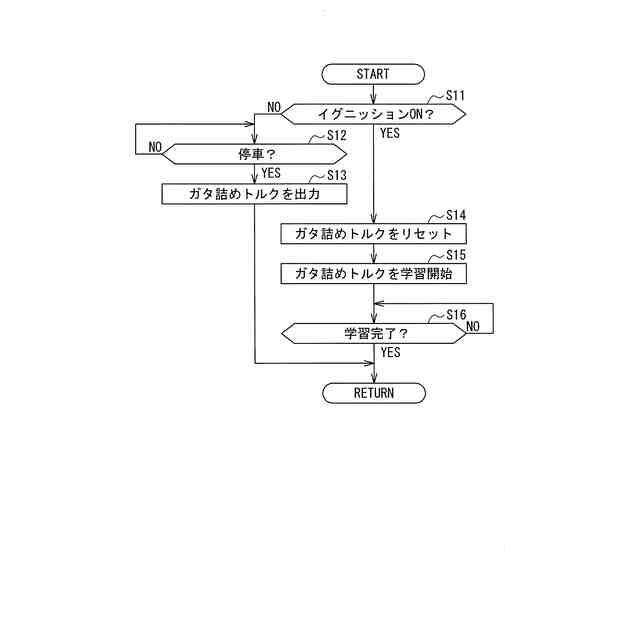
図3は、本発明の一実施例に係る車両用制御装置による出力動作とリセット動作の手順を示すフローチャートである。
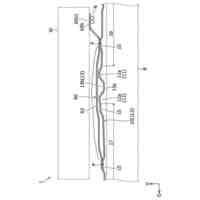
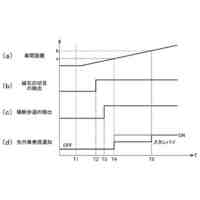
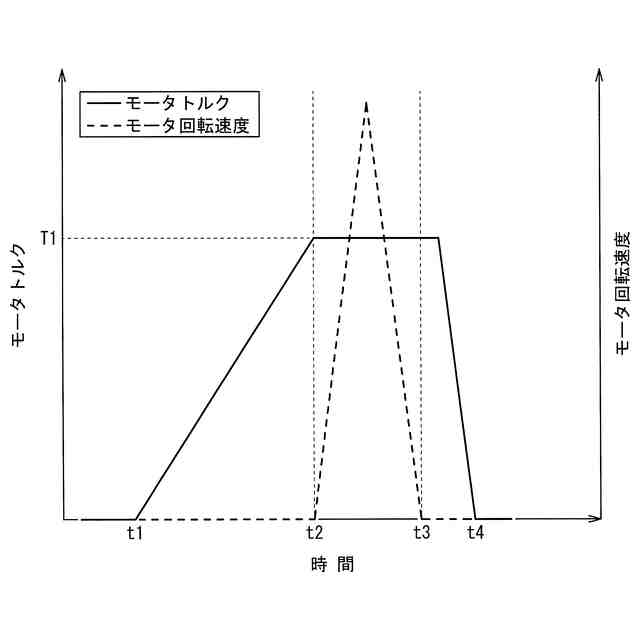
図4は、本発明の一実施例に係る車両用制御装置による学習動作の実行時のモータの状態の推移を示すタイミングチャートである。
【発明を実施するための形態】
【0009】
本発明の一実施の形態に係る車両用制御装置は、走行用のモータを備える車両に搭載され、モータを制御する制御部を備える車両用制御装置であって、制御部は、ブレーキ操作量が所定値以上、かつ、車両が停車状態の場合に、モータに所定の微小トルクから漸増するようにモータトルクを出力させるモータトルク漸増動作と、モータトルクの漸増中にモータの回転速度が所定の閾値を超えた場合に、モータトルクの出力を停止する停止動作と、出力を停止する直前のモータトルクをガタ詰めトルクとして学習する学習動作と、ガタ詰めトルクの学習の完了後に、ブレーキ操作量が所定値以上、かつ、車両が停車状態の場合に、学習したガタ詰めトルクをモータに出力させる出力動作と、を実行することを特徴とする。これにより、本発明の一実施の形態に係る車両用制御装置は、車両の停車時の駆動系のガタ詰めを短時間で行うことができ、ガタ詰めに要する消費電力を低減することができる。
【実施例】
【0010】
以下、図面を参照して、本発明の実施例に係る車両用制御装置を搭載した車両について詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
スズキ株式会社
エンジン
24日前
スズキ株式会社
エンジン
24日前
スズキ株式会社
船舶推進機
10日前
スズキ株式会社
船舶推進機
10日前
スズキ株式会社
船舶推進機
10日前
スズキ株式会社
船舶推進機
10日前
スズキ株式会社
船舶推進機
10日前
スズキ株式会社
船舶推進機
10日前
スズキ株式会社
ダンパ装置
8日前
スズキ株式会社
燃料供給装置
今日
スズキ株式会社
車両浄化装置
22日前
スズキ株式会社
着桟支援装置
16日前
スズキ株式会社
動力伝達装置
8日前
スズキ株式会社
車両浄化装置
22日前
スズキ株式会社
車両用変速機
18日前
スズキ株式会社
車体下部構造
1日前
スズキ株式会社
車体下部構造
1日前
スズキ株式会社
車体下部構造
1日前
スズキ株式会社
車両の報知装置
4日前
スズキ株式会社
車両の制御装置
24日前
スズキ株式会社
車両の制御装置
10日前
スズキ株式会社
車両の制御装置
18日前
スズキ株式会社
車両の制御装置
18日前
スズキ株式会社
車両の制御装置
18日前
スズキ株式会社
車両用ドア構造
今日
スズキ株式会社
情報処理システム
23日前
スズキ株式会社
情報処理システム
23日前
スズキ株式会社
車両用シート構造
15日前
スズキ株式会社
車両の変速制御装置
22日前
スズキ株式会社
バイフューエル車両
今日
スズキ株式会社
触媒の劣化診断装置
4日前
スズキ株式会社
車両の給電システム
23日前
スズキ株式会社
電動台車の制御装置
4日前
スズキ株式会社
車両用制動支援装置
22日前
スズキ株式会社
自動駐車制御システム
9日前
スズキ株式会社
電動車両の車体下部構造
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ