TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082000
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023195162
出願日
2023-11-16
発明の名称
自動駐車制御システム
出願人
スズキ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/06 20060101AFI20250521BHJP(車両一般)
要約
【課題】車両の周囲に移動体が存在する状況においても利便性の高い自動駐車制御を実行することができる自動駐車制御システムを提供する。
【解決手段】自動駐車制御システム1は、道路Bに面した駐車区域Pを目標駐車位置として設定し、前記道路B上の車両100を前記目標駐車位置に移動させるための駐車経路Rを演算する経路演算部21と、前記駐車経路Rに従って前記目標駐車位置に前記車両100を駐車させる自動駐車制御を行うように構成された駐車制御部22と、前記道路B上に存在する移動体Aを検出する移動体検出部23と、前記移動体Aの進路と前記駐車経路Rとが交錯するかを判定する交錯判定部24と、前記交錯判定部24によって前記移動体Aの進路と前記駐車経路Rとが交錯すると判定された場合に、前記駐車制御部22による前記自動駐車制御を調整する駐車制御調整部27とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
道路に面した駐車区域を目標駐車位置として設定し、前記道路上の車両を前記目標駐車位置に移動させるための駐車経路を演算する経路演算部と、
前記駐車経路に従って前記目標駐車位置に前記車両を駐車させる自動駐車制御を行うように構成された駐車制御部と、
前記道路上に存在する移動体を検出する移動体検出部と、
前記移動体の進路と前記駐車経路とが交錯するかを判定する交錯判定部と、
前記交錯判定部によって前記移動体の進路と前記駐車経路とが交錯すると判定された場合に、前記駐車制御部による前記自動駐車制御を調整する駐車制御調整部と
を備える、自動駐車制御システム。
続きを表示(約 1,800 文字)
【請求項2】
前記交錯判定部によって前記移動体の進路と前記駐車経路とが交錯すると判定された場合、前記駐車制御調整部は、前記経路演算部によって演算される前記駐車経路を変更するように構成されている、請求項1に記載の自動駐車制御システム。
【請求項3】
前記道路の道幅を取得する道幅取得部をさらに備え、
前記駐車制御調整部は、前記移動体が他車両であって、前記道路の道幅が、前記車両と前記他車両とのすれ違いが可能な道幅以上の場合に、前記道路において前記目標駐車位置が存在する側の道路端に前記車両を移動して一時停止するように前記駐車経路を変更する、請求項2に記載の自動駐車制御システム。
【請求項4】
前記交錯判定部によって前記移動体の進路と前記駐車経路とが交錯すると判定された場合、前記駐車制御調整部は、前記駐車経路上で前記車両を一時停止させるように構成されている、請求項1に記載の自動駐車制御システム。
【請求項5】
前記駐車制御調整部は、前記移動体の幅が所定値以下の場合に、前記道路において前記目標駐車位置が存在する側の道路端に前記移動体の進路を確保するように、前記車両の一時停止位置を決定する、請求項4に記載の自動駐車制御システム。
【請求項6】
前記交錯判定部によって前記移動体の進路と前記駐車経路とが交錯すると判定された場合に、前記移動体が前記駐車経路との交錯地点に到達するまでの到達予測時間を演算する到達予測時間演算部をさらに備え、
前記駐車制御調整部は、前記到達予測時間演算部によって演算される前記到達予測時間に基づいて前記交錯地点における前記移動体と前記車両との交錯の可能性が高いと判定される場合に、前記自動駐車制御の調整を行う、請求項1から5のいずれか一項に記載の自動駐車制御システム。
【請求項7】
前記駐車制御調整部は、前記交錯判定部によって前記移動体の進路と前記駐車経路とが交錯すると判定された場合、前記車両を一時停止させるように構成されており、
前記車両が一時停止した状態で、前記移動体が前記交錯地点を通過した場合、または前記到達予測時間演算部によって演算される前記到達予測時間が経過するまでに前記車両が前記交錯地点を通過できると判定された場合、前記駐車制御調整部は、前記自動駐車制御による前記車両の移動を再開する、請求項6に記載の自動駐車制御システム。
【請求項8】
前記駐車制御調整部は、前記交錯判定部によって前記移動体の進路と前記駐車経路とが交錯すると判定された場合、前記車両を一時停止させるように構成されており、
前記車両が一時停止した状態で、前記車両の運転者によって制御再開のための承認操作が行われた場合、前記駐車制御調整部は、前記自動駐車制御による前記車両の移動を再開する、請求項6に記載の自動駐車制御システム。
【請求項9】
前記交錯判定部は、前記自動駐車制御によって前記車両が後退する場合は、前記到達予測時間演算部によって演算される前記移動体の前記到達予測時間が経過するまでに前記車両の後端部が前記交錯地点を通過するか否かを判定し、前記自動駐車制御によって前記車両が前進する場合は、前記到達予測時間演算部によって演算される前記移動体の前記到達予測時間が経過するまでに前記車両の前端部が前記交錯地点を通過するか否かを判定し、
前記駐車制御調整部は、前記自動駐車制御によって前記車両が後退する場合に前記移動体の前記到達予測時間が経過するまでに前記車両の後端部が前記交錯地点を通過すると判定されると、または、前記自動駐車制御によって前記車両が前進する場合に前記移動体の前記到達予測時間が経過するまでに前記車両の前端部が前記交錯地点を通過すると判定されると、前記自動駐車制御の調整を行わずに前記自動駐車制御を継続して実行する、請求項6に記載の自動駐車制御システム。
【請求項10】
前記移動体の幅が所定値以下であって、前記経路演算部によって演算される前記駐車経路が、前記移動体との交錯地点の後に切り返し位置を含む場合、前記駐車制御調整部は、前記道路において前記目標駐車位置が存在する側の道路端に前記移動体の進路を確保するように、前記駐車経路を変更して車両を一時停止させるように構成されている、請求項6に記載の自動駐車制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の自動駐車制御システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
周辺の障害物に衝突しないように車両を目標とする駐車位置に駐車させる自動駐車制御を行う自動駐車制御システムの普及が進んでいる。例えば特許文献1には、ユーザからの所定の入力があったときに自動駐車処理を行い、車両から所定の中止範囲内に障害物が検出された場合に自動駐車処理を再開不能に中止し、中止範囲の外側に設定された中断範囲内に障害物が検出された場合に自動駐車処理を再開可能に中断するシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-160476号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献1に記載の自動駐車制御システムにおいては、車両に衝突するおそれのある障害物を検出するために、車両の周囲に中止範囲および中断範囲を設定している。中止範囲または中断範囲内に障害物が検出された場合に自動駐車処理を中止または中断することにより、車両と障害物との衝突を回避することはできる。しかし、障害物が、例えば他車両などの移動体であった場合には移動体の移動を妨げてしまう可能性がある。従来の自動駐車制御システムにおいては、車両周囲を通行している移動体の状況を十分に考慮できておらず、多くの場合、駐車場内での自動駐車制御に限定されていた。そこで、車両の周囲に移動体が存在する状況においても利便性の高い自動駐車制御を実行することが望まれている。
【0005】
本発明は、上記のような実状に鑑みてなされたものであり、その目的は、車両の周囲に移動体が存在する状況においても利便性の高い自動駐車制御を実行することにある。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、自動駐車制御システムは、道路に面した駐車区域を目標駐車位置として設定し、前記道路上の車両を前記目標駐車位置に移動させるための駐車経路を演算する経路演算部と、前記駐車経路に従って前記目標駐車位置に前記車両を駐車させる自動駐車制御を行うように構成された駐車制御部と、前記道路上に存在する移動体を検出する移動体検出部と、前記移動体の進路と前記駐車経路とが交錯するかを判定する交錯判定部と、前記交錯判定部によって前記移動体の進路と前記駐車経路とが交錯すると判定された場合に、前記駐車制御部による前記自動駐車制御を調整する駐車制御調整部とを備える。
【発明の効果】
【0007】
本発明によれば、車両の周囲に移動体が存在する状況においても利便性の高い自動駐車制御を実行することができる。
【図面の簡単な説明】
【0008】
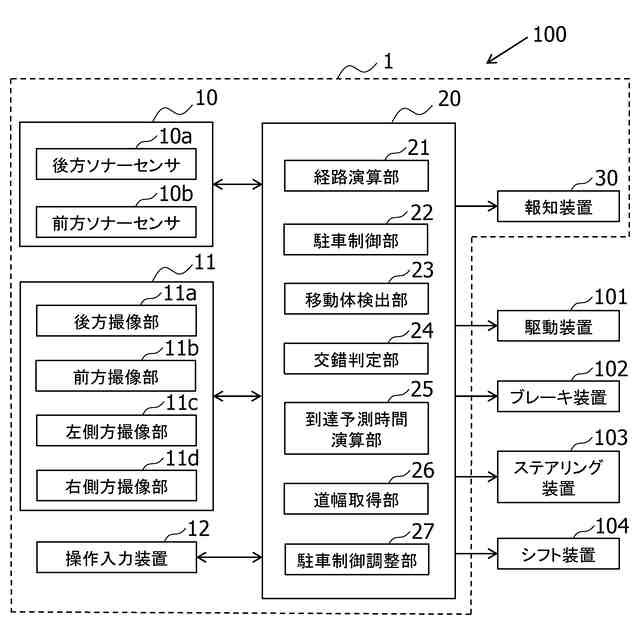
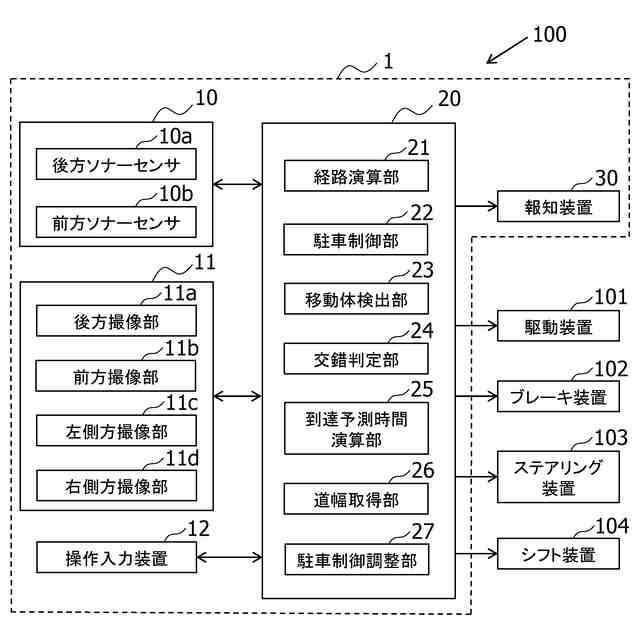
図1は、本発明の一実施の形態における自動駐車制御システムの概略構成を示すブロック図である。
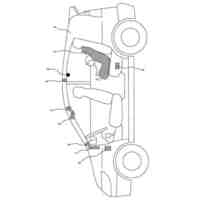
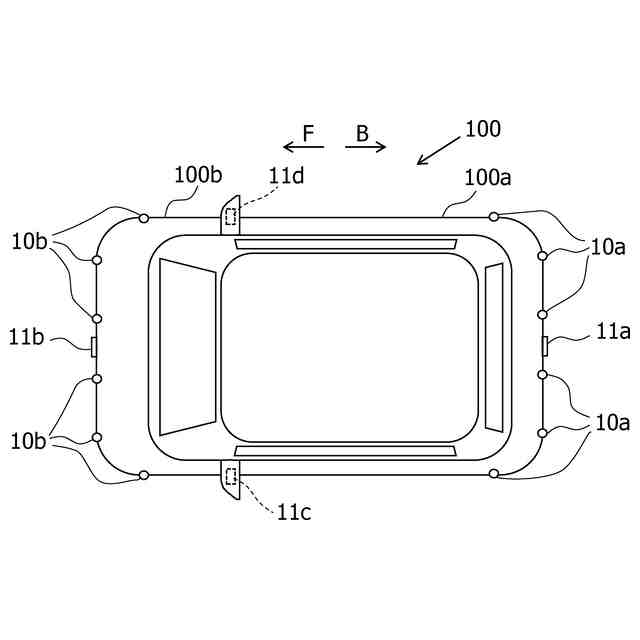
図2は、本発明の一実施の形態における自動駐車制御システムを搭載した車両を模式的に示す平面図である。
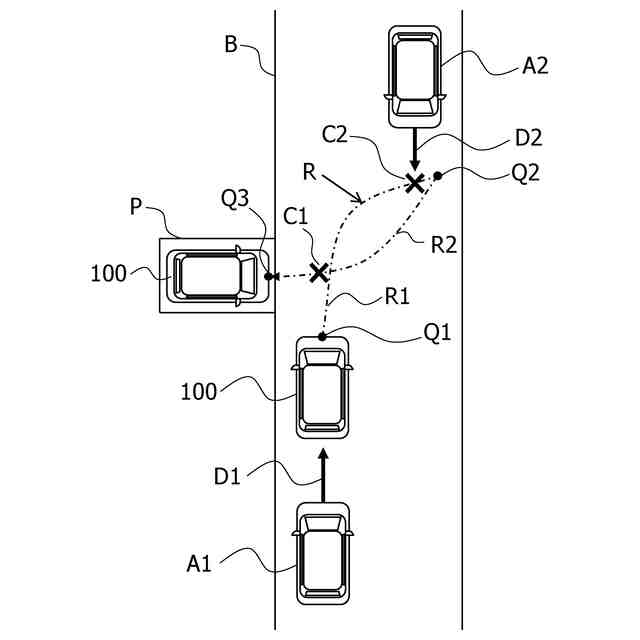
図3は、自動駐車制御により道路に面した駐車位置に車両を駐車させるための駐車経路の一例を示す図である。
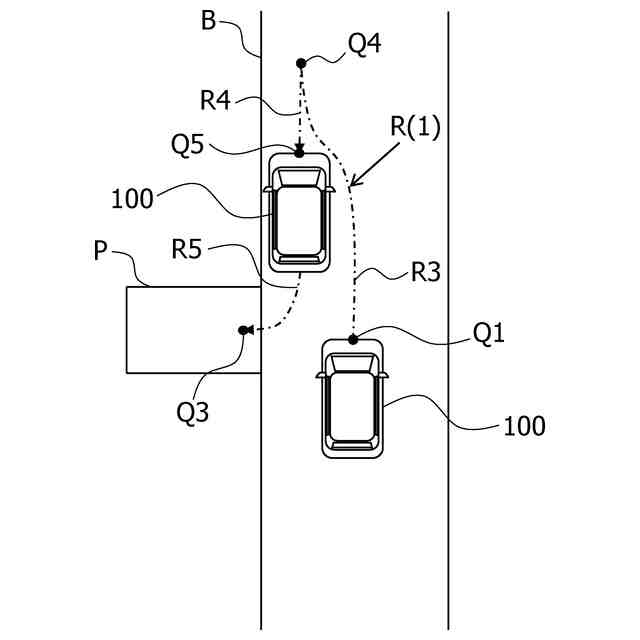
図4は、自動駐車制御において駐車経路を変更する例を説明する図である。
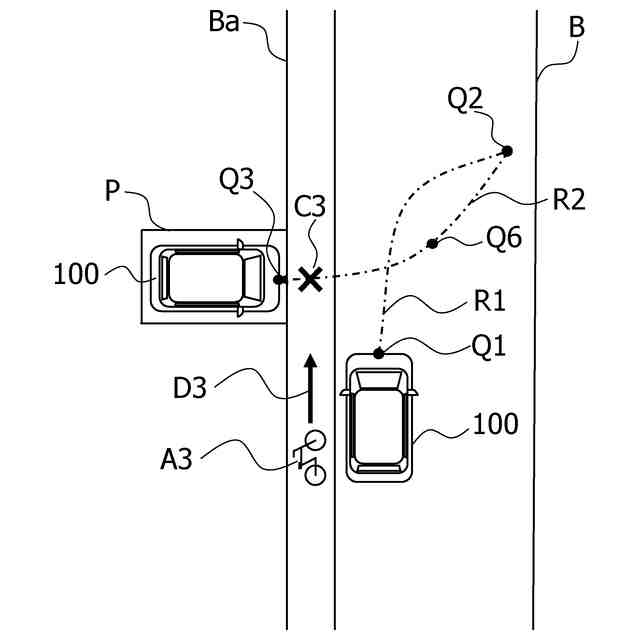
図5は、自動駐車制御において駐車経路上で車両を一時停止する例を説明する図である。
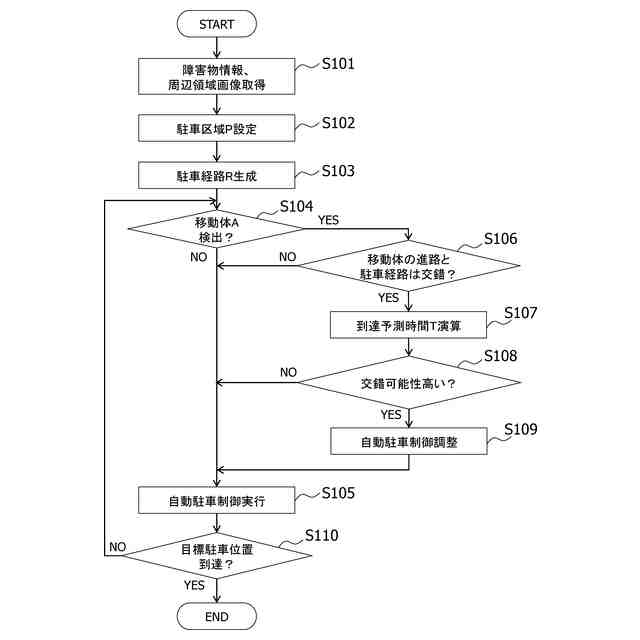
図6は、本発明の一実施の形態における自動駐車制御の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の一実施の形態に係る自動駐車制御システムについて、図面を参照しながら詳細に説明する。図1は、本実施の形態における自動駐車制御システムの概略構成を示すブロック図である。図2は、本実施の形態における自動駐車制御システムを搭載した車両を模式的に示す平面図である。図2においては、車両の前方側を矢印Fで示し、車両の後方側を矢印Bで示す。
【0010】
図1に示すように、本実施の形態による自動駐車制御システム1が搭載される車両100は、駆動装置101と、ブレーキ装置102と、ステアリング装置103と、シフト装置104とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
スズキ株式会社
対価支払いシステム、対価支払い通知装置および対価支払い方法
5日前
個人
カーテント
1か月前
個人
警告装置
2か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
2か月前
日本精機株式会社
ケース
3か月前
個人
車輪清掃装置
1か月前
個人
ホイルのボルト締結
11日前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
個人
アンチロール制御装置
3か月前
個人
キャンピングトライク
26日前
日本精機株式会社
表示装置
3か月前
個人
ワイパーゴム性能保持具
1か月前
個人
車両用スリップ防止装置
17日前
個人
アクセルのソフトウェア
16日前
個人
ブレーキシステム
3か月前
個人
キャンピングトレーラー
26日前
個人
車載小物入れ兼雨傘収納具
9日前
日本精機株式会社
車載表示装置
12日前
株式会社クラベ
ヒータユニット
1か月前
株式会社ニフコ
保持装置
10日前
横浜ゴム株式会社
タイヤ
3か月前
個人
自動車ドア開度規制ベルト
2か月前
井関農機株式会社
収穫作業車両
1か月前
日本精機株式会社
車両用表示装置
2か月前
株式会社ユーシン
照明装置
2か月前
井関農機株式会社
作業車両
23日前
日本精機株式会社
車両用投影装置
1か月前
日本精機株式会社
車両用投影装置
1か月前
井関農機株式会社
作業車両
3か月前
株式会社ユーシン
照明装置
3か月前
日本精機株式会社
車両用表示装置
1か月前
井関農機株式会社
作業車両
23日前
日本精機株式会社
車両用表示装置
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ