TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067569
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023177656
出願日
2023-10-13
発明の名称
車両の制御装置
出願人
スズキ株式会社
代理人
弁理士法人東京国際特許事務所
主分類
B60W
10/04 20060101AFI20250417BHJP(車両一般)
要約
【課題】バンパの位置を比較的廉価な構成により上昇可能とする。
【解決手段】車両Vの制御装置は、駆動源1と、前輪21または後輪22のうち、いずれか一方(後輪22)に制動トルクTRQbを生じさせる制動制御手段と、制動制御手段により後輪22に制動トルクTRQbを生じさせているときに、前輪または後輪の他方(前輪21)に、アクセル相当トルクTRQaccとは異なる駆動源1の駆動トルクTRQdを伝達させ、前輪21により車両Vを走行させるリフトアップ走行を実施する走行制御手段と、を備える。
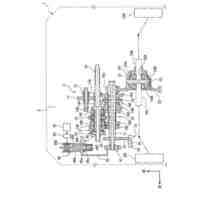
【選択図】 図2
特許請求の範囲
【請求項1】
駆動源と、
前輪または後輪のうち、いずれか一方である第1車輪に制動トルクを生じさせる制動制御手段と、
前記制動制御手段により前記第1車輪に前記制動トルクを生じさせているときに、前記前輪または前記後輪のうちの他方である第2車輪に、アクセル相当トルクとは異なる前記駆動源の駆動トルクを伝達させ、前記第2車輪により車両を走行させるリフトアップ走行を実施する走行制御手段と、を備える車両の制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記駆動トルクは、アクセル相当トルクに所定の第1トルクを加算したトルクであり、
前記制動トルクは、所定の第2トルクである、請求項2に記載の車両の制御装置。
【請求項3】
前記第2トルクは、前記第1トルクと等しい、請求項2に記載の車両の制御装置。
【請求項4】
前記駆動トルクは、前記リフトアップ走行中の車速を所定の車速以下とする所定のトルクである、請求項1に記載の車両の制御装置。
【請求項5】
前記前輪および前記後輪のうち、一方を駆動輪とし、他方を従動輪とする車両に設けられ、
前記制動制御手段は、前記従動輪を前記第1車輪として、前記従動輪のみに前記制動トルクを生じさせ、
前記走行制御手段は、前記駆動輪を前記第2車輪として、前記駆動輪のみに前記駆動トルクを伝達させる、請求項1から4のいずれか一項に記載の車両の制御装置。
【請求項6】
運転者により操作され、前記リフトアップ走行を実施するか否かを指示する操作部をさらに備え、
前記走行制御手段は、前記操作部により前記リフトアップ走行の実施が指示された場合に、前記第2車輪に前記駆動トルクを伝達させて、前記リフトアップ走行を実施する、請求項1から4のいずれか一項に記載の車両の制御装置。
【請求項7】
前記制動制御手段は、前記制動トルクを回生制動により生じさせる、請求項1から4のいずれか一項に記載の車両の制御装置。
【請求項8】
前記制動制御手段は、前記制動トルクを摩擦制動により生じさせる、請求項1から4のいずれか一項に記載の車両の制御装置。
【請求項9】
車速を検出する車速検出部をさらに備え、
前記走行制御手段は、前記車速検出部により検出された車速が所定の車速以下である場合にのみ、前記リフトアップ走行を実施する、請求項1から4のいずれか一項に記載の車両の制御装置。
【請求項10】
前記リフトアップ走行の開始後、車速が前記所定の車速を超えるか、前記リフトアップ走行の開始から所定の時間が経過するか、前記第1車輪にロックが生じた場合に、前記リフトアップ走行を停止させるリフトアップ走行停止手段をさらに備える、請求項9に記載の車両の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
路面の段差や傾斜に対するフロントバンパの接触を防止するため、フロントバンパの位置を安全に上昇させる機能に対する要請が存在する。特許文献1には、電動車椅子に関するものであるが、前輪が段差に突き当たった場合に、モータによる後輪の駆動力を増大させて、前輪を上昇させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6901276号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
電子制御式サスペンション装置を備える車両では、フロントバンパの高さを適宜に切り替えることにより、路面の段差等に対するフロントバンパの接触を回避することが可能である。具体的には、通常の走行では、車高を下げるローダウン設定により燃費や乗り心地の向上を図りながら、段差や傾斜のある路面を走行する場合に、車高を上げるリフトアップ設定によりフロントバンパの位置を上昇させ、フロントバンパが段差等に接触する事態を回避する。
【0005】
しかし、電子制御式サスペンション装置には、装備に相応のコストを要するため、搭載可能な車両が限定されるという問題がある。
【0006】
このような実情に鑑み、本発明は、バンパの位置を比較的廉価な構成により上昇可能として、路面の段差等に対するバンパの接触を回避することのできる車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
前記の課題を解決するため、本発明の一形態に係る車両の制御装置は、駆動源と、前輪または後輪のうち、いずれか一方である第1車輪に制動トルクを生じさせる制動制御手段と、前記制動制御手段により前記第1車輪に前記制動トルクを生じさせているときに、前記前輪または前記後輪のうちの他方である第2車輪に、アクセル相当トルクとは異なる前記駆動源の駆動トルクを伝達させ、前記第2車輪により車両を走行させるリフトアップ走行を実施する走行制御手段と、を備える。
【発明の効果】
【0008】
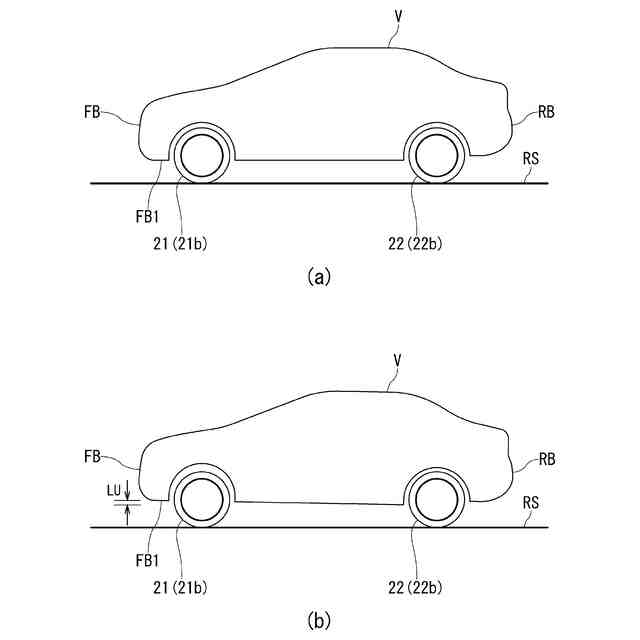
本発明の一形態によれば、前輪または後輪のうち、いずれか一方である第1車輪に制動トルクを生じさせる一方、前輪または後輪のうちの他方である第2車輪に駆動トルクを伝達させることで、駆動トルクによる車輪の回転方向、つまり、車両の進行方向に関する前方において、バンパの位置が上昇する状態が形成される。この状態で、第2車輪に対して駆動トルクをかけ続けることで、車両をバンパの位置が上昇したままの状態で走行させること、つまり、リフトアップ走行を実施することが可能となる。よって、車両の進行方向における前側のバンパの位置を、制御を主体とした比較的廉価な構成により上昇可能として、路面の段差等に対するバンパの接触を回避することが可能となる。
【図面の簡単な説明】
【0009】
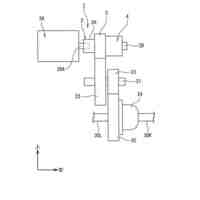
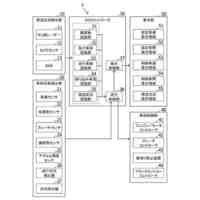
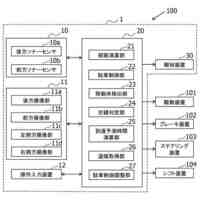
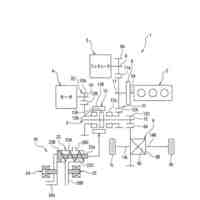
本発明の一実施形態に係る車両の制御装置の全体的な構成を示す概略図である。
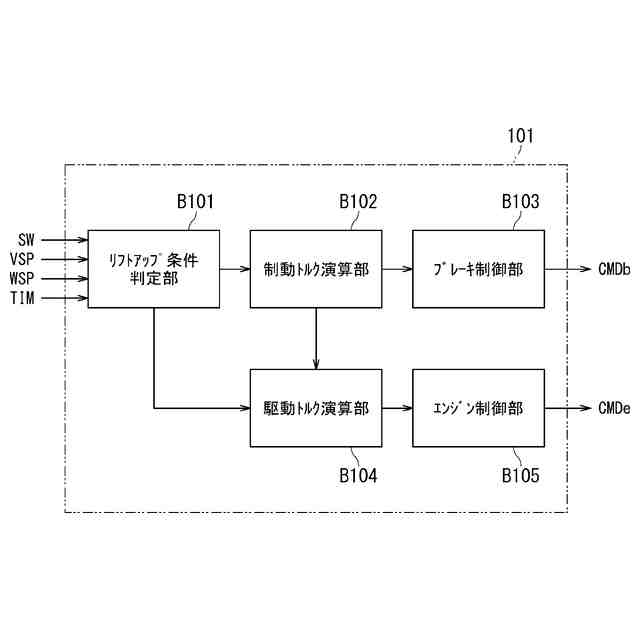
同上実施形態に係るコントローラの内部構成を模式的に示す概略図である。
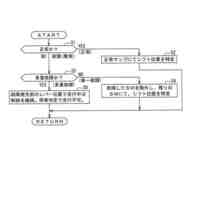
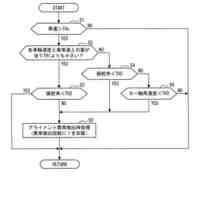
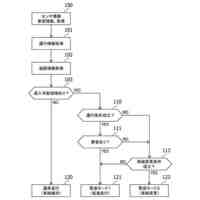
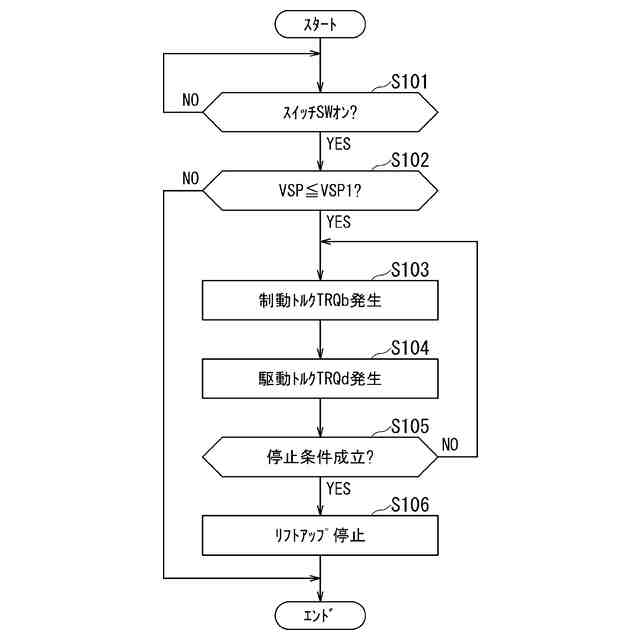
同上実施形態に係るリフトアップ走行制御の基本的な流れを示すフローチャートである。
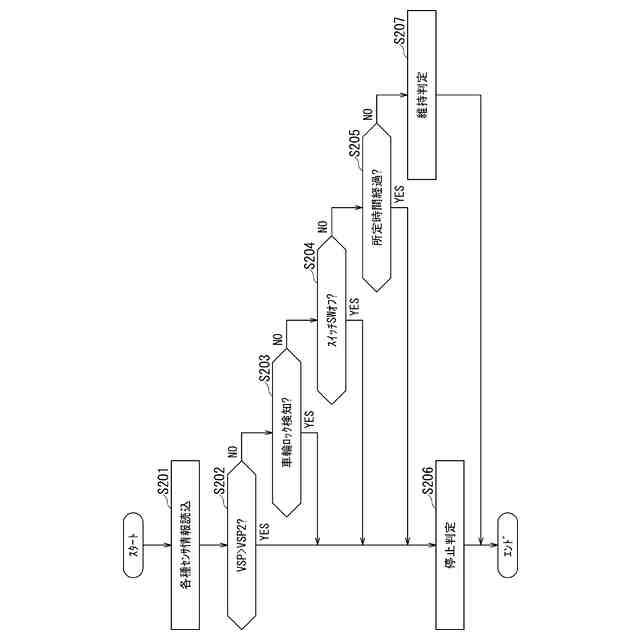
リフトアップ走行停止判定処理の内容を示すフローチャートである。
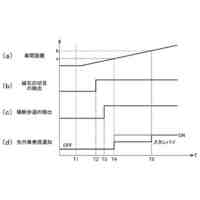
リフトアップ走行時における車両の挙動を時系列に示すタイミングチャートである。
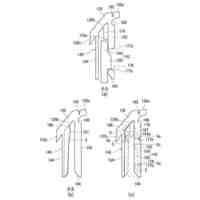
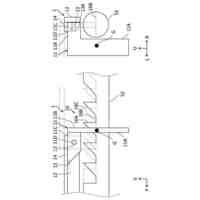
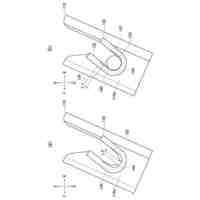
リフトアップ前後におけるバンパの位置を比較して示す説明図である。
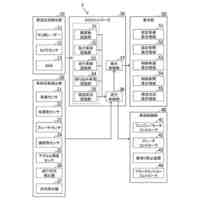
本発明の他の実施形態に係る車両の制御装置の全体的な構成を示す概略図である。
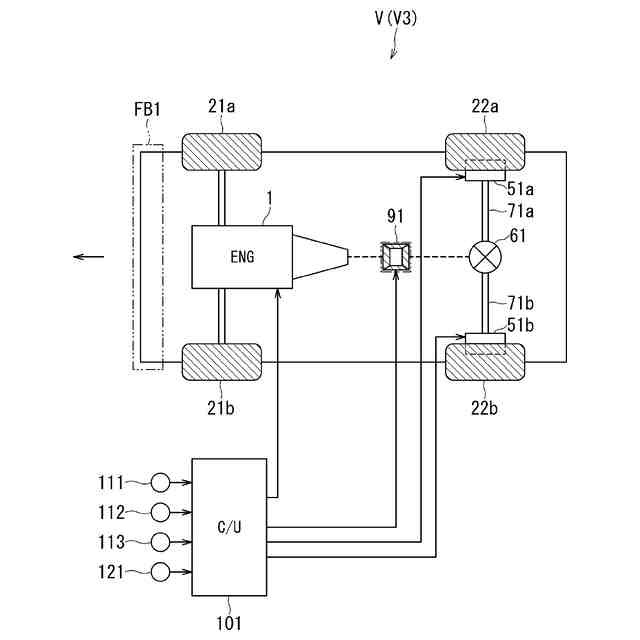
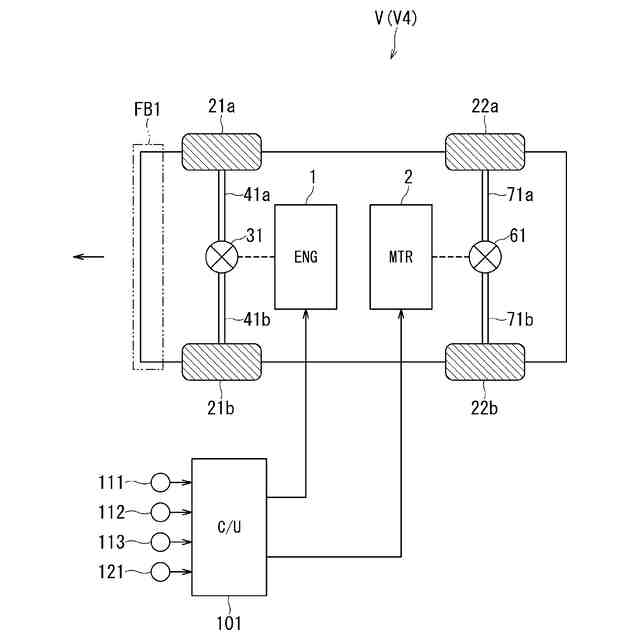
本発明の更に別の実施形態に係る車両の制御装置の全体的な構成を示す概略図である。
本発明の更に別の実施形態に係る車両の制御装置の全体的な構成を示す概略図である。
【発明を実施するための形態】
【0010】
以下に図面を参照して、本発明の実施の形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
スズキ株式会社
船舶推進機
2日前
スズキ株式会社
ダンパ装置
今日
スズキ株式会社
船舶推進機
2日前
スズキ株式会社
船舶推進機
2日前
スズキ株式会社
船舶推進機
2日前
スズキ株式会社
船舶推進機
2日前
スズキ株式会社
船舶推進機
2日前
スズキ株式会社
動力伝達装置
今日
スズキ株式会社
車両用変速機
10日前
スズキ株式会社
着桟支援装置
8日前
スズキ株式会社
車両の制御装置
10日前
スズキ株式会社
車両の制御装置
10日前
スズキ株式会社
車両の制御装置
2日前
スズキ株式会社
車両の制御装置
10日前
スズキ株式会社
車両用シート構造
7日前
スズキ株式会社
車両用制動支援装置
14日前
スズキ株式会社
車両の変速制御装置
14日前
スズキ株式会社
自動駐車制御システム
1日前
スズキ株式会社
電子制御サスペンション
13日前
スズキ株式会社
ハイブリッド車両の駆動装置
1日前
スズキ株式会社
車輪アライメント異常検出装置
2日前
スズキ株式会社
車両用シートフレーム支持構造
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
13日前
スズキ株式会社
運行サービス用車両の走行制御装置
2日前
スズキ株式会社
亜鉛めっき層を備えた高強度ボルト及びその製造方法
1日前
スズキ株式会社
PC/ABS樹脂およびそれにより形成される自動車内装部品
13日前
個人
飛行自動車
3か月前
個人
警告装置
1か月前
個人
車窓用防虫網戸
16日前
個人
小型EVシステム
1か月前
日本精機株式会社
ケース
1か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
2か月前
個人
アンチロール制御装置
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ