TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035726
公報種別
公開特許公報(A)
公開日
2025-03-14
出願番号
2023142959
出願日
2023-09-04
発明の名称
パラレルリンクを含むロボット
出願人
日本精工株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B25J
15/04 20060101AFI20250307BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エンドエフェクタの取付位置の精度を確保しつつ、エンドエフェクタを簡便に着脱することができるパラレルリンクを含むロボットを提供すること。
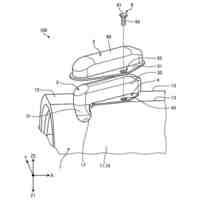
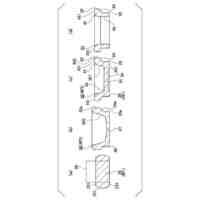
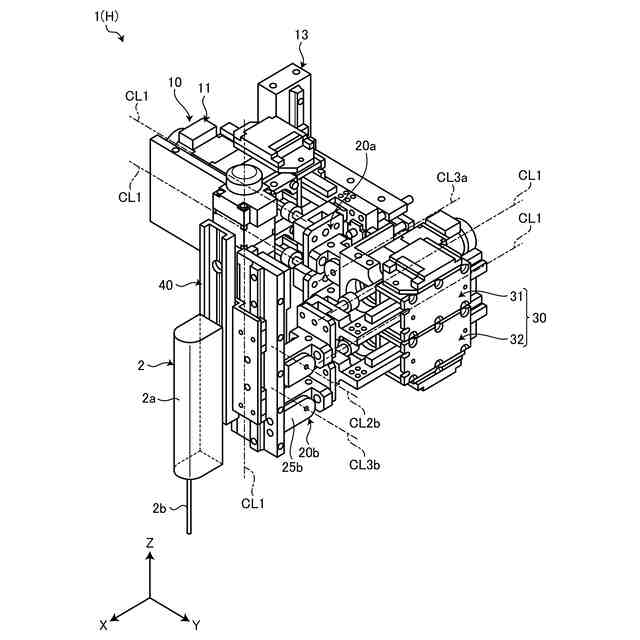
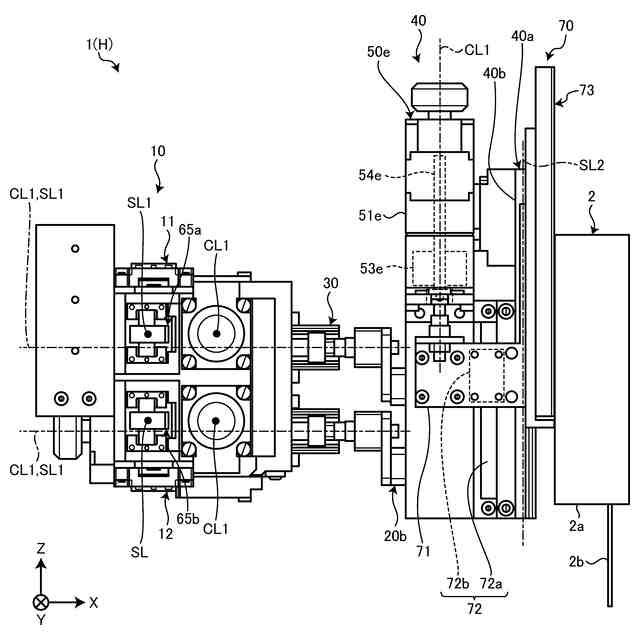
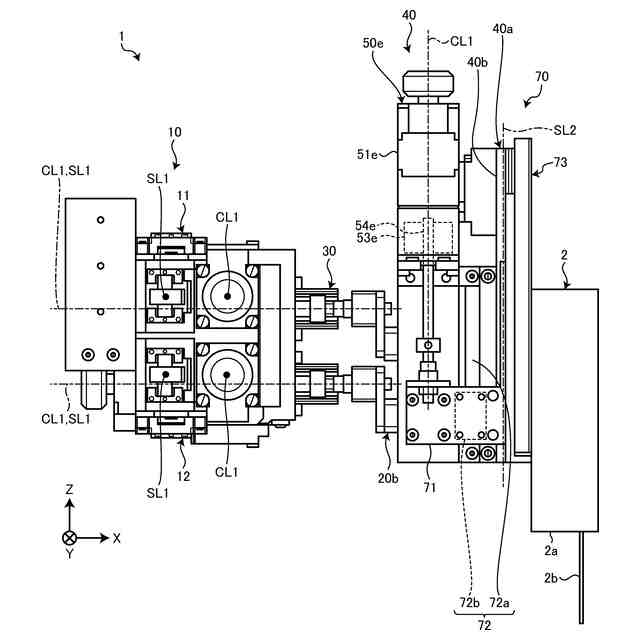
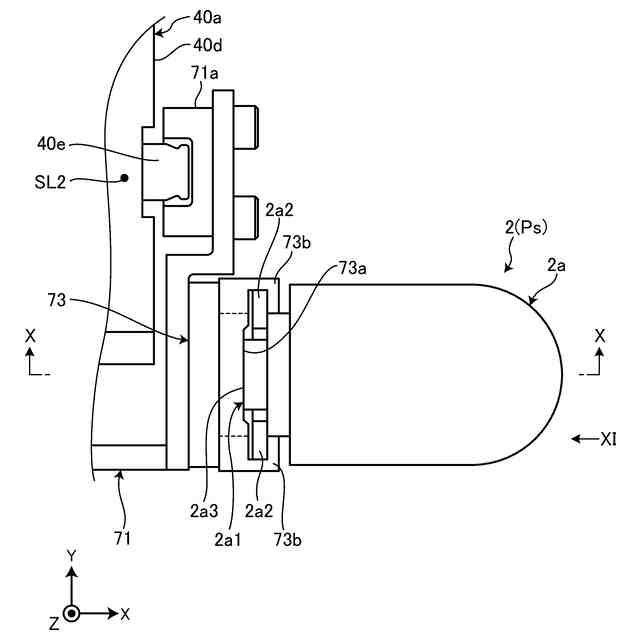
【解決手段】パラレルリンクを含むロボット1は、医療器具2が第2基準軸線SL2に沿って移動可能に、医療器具2が着脱可能に取り付けられる第3取付部73と、第3取付部73に配置され、医療器具2を取付位置Psで位置決めする位置決め部80と、を備える。位置決め部80は、医療器具2が取付位置Psに位置するときに医療器具2の被対向面2a3にある凹部2a4に嵌まる第1位置P1と、凹部2a4から外れる第2位置P2との間を移動可能なボール82と、ボール82を第2位置P2から第1位置P1に向けて付勢するスプリング83と、を備える。医療器具2が取付位置Psから第2基準軸線SL2に沿って移動する場合、被対向面2a3は、ボール82を第1位置P1から第2位置P2に向けて押圧する。
【選択図】図1
特許請求の範囲
【請求項1】
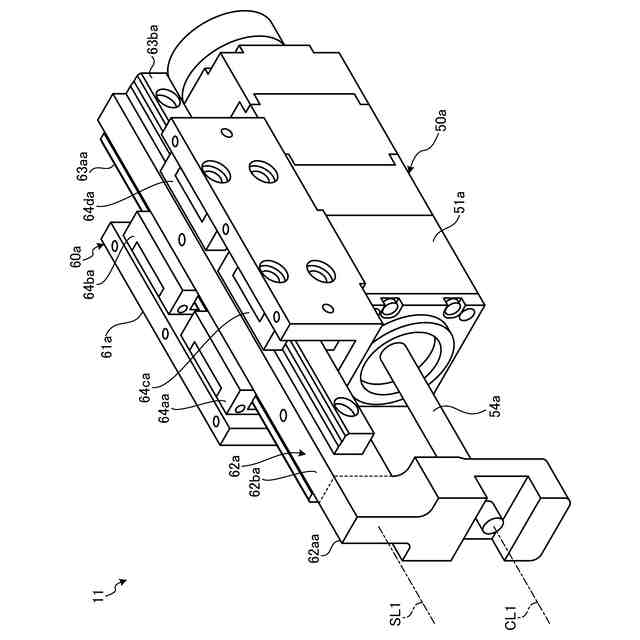
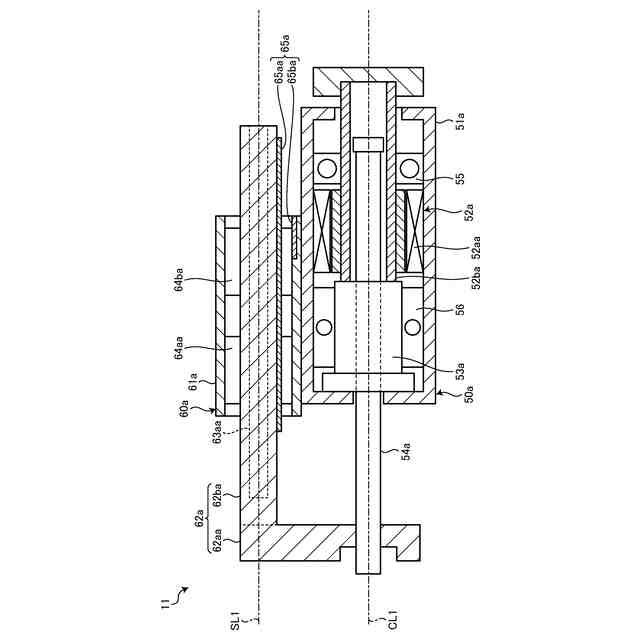
ハウジング、前記ハウジングに収納されているナット、および、前記ナットが回転することで前記ハウジングに対して移動するねじ軸を有する駆動部と、
対象物に作用するエンドエフェクタを基準軸線に沿って案内するガイド部と、を備え、
前記ガイド部は、
前記基準軸線に沿って前記ねじ軸と一体に移動するスライド部材と、
前記スライド部材に配置され、前記エンドエフェクタが前記スライド部材に対して前記基準軸線に沿って移動可能に、前記エンドエフェクタが着脱可能に取り付けられる取付部と、
前記取付部に配置され、前記エンドエフェクタを前記スライド部材に対して取付位置で位置決めする位置決め部と、を備え、
前記取付部は、前記基準軸線と平行であり、前記エンドエフェクタと対向する対向面を有し、
前記エンドエフェクタは、前記取付部に取り付けられている状態において前記対向面に対向する被対向面に凹部を有し、
前記位置決め部は、
前記エンドエフェクタが前記取付位置に位置するときに前記対向面から突出した状態で前記凹部に嵌まる第1位置と、前記凹部から外れる第2位置との間を移動可能な嵌合部と、
前記嵌合部を前記第2位置から前記第1位置に向けて付勢する付勢部と、を備え、
前記エンドエフェクタが前記取付位置から前記基準軸線に沿って移動する場合、前記被対向面は、前記嵌合部を前記第1位置から前記第2位置に向けて押圧する、
パラレルリンクを含むロボット。
続きを表示(約 520 文字)
【請求項2】
前記被対向面における前記凹部の周縁は、円状であり、
前記嵌合部は、前記凹部の周縁の直径よりも大きい直径を有する球状であり、
前記付勢部は、コイルスプリングである、
請求項1に記載のパラレルリンクを含むロボット。
【請求項3】
前記エンドエフェクタは、前記対象物に作用する針部材を備え、
前記針部材は、前記エンドエフェクタが前記取付位置に位置するときに前記基準軸線に沿って延びる姿勢である、
請求項1に記載のパラレルリンクを含むロボット。
【請求項4】
前記ガイド部は、前記エンドエフェクタが前記取付部に取り付けられているときに前記エンドエフェクタが前記取付位置から前記対象物側に近づくことを防ぐストッパ部をさらに備える、
請求項1に記載のパラレルリンクを含むロボット。
【請求項5】
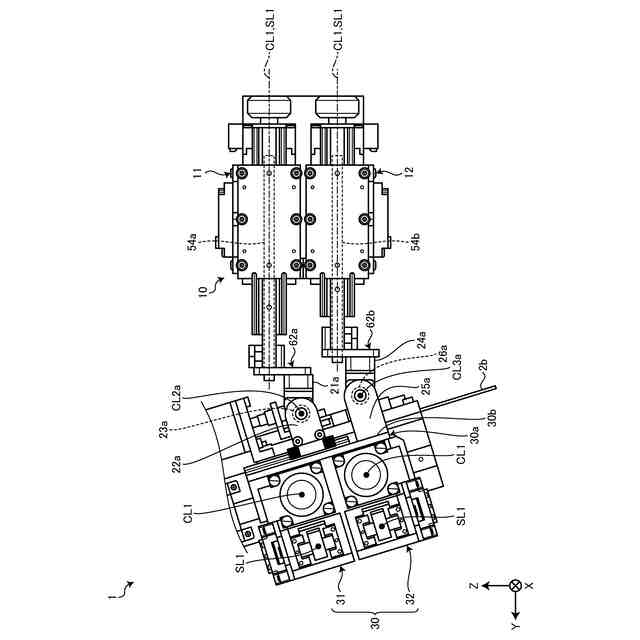
2つの前記駆動部を有し、前記スライド部材に対して傾斜可能な腕ユニットをさらに備え、
前記腕ユニットが有する2つの前記ねじ軸の中心軸線同士は、互いに平行となるように配置されている、
請求項1に記載のパラレルリンクを含むロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、パラレルリンクを含むロボットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、ロボットの一例として、エンドエフェクタを備えるパラレルリンクを含むロボットが開示されている。エンドエフェクタは、例えば眼科手術用の処置具が装着される。パラレルリンクを含むロボットは、エンドエフェクタを所望の目標位置及び姿勢に移動させるようにアクチュエータを制御する。また、特許文献1のロボットにおいては、パラレルリンクを含む構成にすることで小型化を図ることができる。一方で、パラレルリンクを含むロボットにおいては、各軸の位置決め精度がロボット全体の位置決め精度へ大きく影響することが知られている。
【先行技術文献】
【特許文献】
【0003】
特許第7088440号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
エンドエフェクタは、用途によって交換可能である。また、エンドエフェクタの用途によっては要求されるエンドエフェクタの位置精度は比較的高い。よって、パラレルリンクを含むロボットに対するエンドエフェクタの取付位置の精度は比較的高いことが望ましい。
【0005】
さらに、例えば、パラレルリンクを含むロボットを用いた眼科手術中に停電が発生した場合、エンドエフェクタの患部への影響を抑制するために、パラレルリンクを含むロボットからエンドエフェクタを容易に取り外したいとの要望がある。
【0006】
本開示の態様は、エンドエフェクタの取付位置の精度を確保しつつ、エンドエフェクタを簡便に着脱することができるパラレルリンクを含むロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の態様において、パラレルリンクを含むロボットは、ハウジング、前記ハウジングに収納されているナット、および、前記ナットが回転することで前記ハウジングに対して移動するねじ軸を有する駆動部と、対象物に作用するエンドエフェクタを基準軸線に沿って案内するガイド部と、を備え、前記ガイド部は、前記基準軸線に沿って前記ねじ軸と一体に移動するスライド部材と、前記スライド部材に配置され、前記エンドエフェクタが前記スライド部材に対して前記基準軸線に沿って移動可能に、前記エンドエフェクタが着脱可能に取り付けられる取付部と、前記取付部に配置され、前記エンドエフェクタを前記スライド部材に対して取付位置で位置決めする位置決め部と、を備え、前記取付部は、前記基準軸線と平行であり、前記エンドエフェクタと対向する対向面を有し、前記エンドエフェクタは、前記取付部に取り付けられている状態において前記対向面に対向する被対向面に凹部を有し、前記位置決め部は、前記エンドエフェクタが前記取付位置に位置するときに前記対向面から突出した状態で前記凹部に嵌まる第1位置と、前記凹部から外れる第2位置との間を移動可能な嵌合部と、前記嵌合部を前記第2位置から前記第1位置に向けて付勢する付勢部と、を備え、前記エンドエフェクタが前記取付位置から前記基準軸線に沿って移動する場合、前記被対向面は、前記嵌合部を前記第1位置から前記第2位置に向けて押圧する。
【0008】
本開示の態様によれば、エンドエフェクタが取付位置に位置する状態から取付部に対してエンドエフェクタを基準軸線に沿って手動にて移動させると、被対向面が嵌合部を押圧し、嵌合部が凹部から外れる。さらに、エンドエフェクタを移動させることで、エンドエフェクタが取付部から取り外される。一方、エンドエフェクタが取り外されている状態から、エンドエフェクタを取付部に手動にて取り付けて、取付部に対してエンドエフェクタを基準軸線に沿って移動させ、エンドエフェクタが取付位置に位置すると、嵌合部が凹部に嵌まり、エンドエフェクタが位置決めされる。このように、エンドエフェクタの取付位置の精度を確保しつつ、エンドエフェクタを簡便に着脱することができる。
【0009】
また、本開示の態様において、前記被対向面における前記凹部の周縁は、円状であり、前記嵌合部は、前記凹部の周縁の直径よりも大きい直径を有する球状であり、前記付勢部は、コイルスプリングである。
【0010】
本開示の態様によれば、位置決め部は、ボールプランジャであり、エンドエフェクタの取付位置の精度を確実に確保することができる。また、エンドエフェクタが取付位置に位置する状態から取付部に対してエンドエフェクタを基準軸線に沿って手動にて移動させるときに、凹部の周縁が嵌合部を押圧することで、嵌合部は、第1位置から第2位置に向けて簡便に移動し、凹部から簡便に外れることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
信号出力回路
12日前
日本精工株式会社
ボールねじ装置
10日前
日本精工株式会社
ハブユニット軸受
10日前
日本精工株式会社
ハブユニット軸受の外輪の製造方法
3日前
日本精工株式会社
転がり軸受用冠形保持器、及び転がり軸受
3日前
日本精工株式会社
転がり軸受の荷重推定装置、荷重推定方法、およびプログラム
3日前
日本精工株式会社
機械部品の製造方法、軸受の製造方法、機械部品、軸受、機械、及び車両
11日前
日本精工株式会社
検出装置付きハブユニット軸受及び検出装置付きハブユニット軸受システム
3日前
日本精工株式会社
検出装置付きハブユニット軸受及び検出装置付きハブユニット軸受システム
3日前
日本精工株式会社
筒状部材の製造方法、機械装置の製造方法、及び車両の製造方法
10日前
日本精工株式会社
筒状部材の製造方法、機械装置の製造方法、および車両の製造方法
10日前
OMC株式会社
ロボット
10日前
川崎重工業株式会社
ハンド
1か月前
株式会社アイセイ
搬送装置
1か月前
株式会社クレスコ
補助吸着具
3日前
株式会社不二越
ロボット
1か月前
個人
けがき用治具
1か月前
国立大学法人金沢大学
ロボット
1か月前
株式会社不二越
ロボット操作装置
1か月前
株式会社エビス
腰ベルト用連結具
10日前
個人
深孔スリーブ駆動ロッド構造
23日前
川崎重工業株式会社
ロボット
1か月前
株式会社ケー・エフ・シー
締結構造
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社デンソー
操縦桿
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
個人
バール
23日前
工機ホールディングス株式会社
作業機
18日前
梅馨堂合同会社
人協働ロボットシステム
25日前
アピュアン株式会社
衝撃工具
1か月前
ARMA株式会社
UI付エンドエフェクタ
26日前
株式会社不二越
基板搬送用ロボット
1か月前
株式会社コスメック
把持装置
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
原利興工業有限公司
工具用スリーブ
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ