TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035647
公報種別
公開特許公報(A)
公開日
2025-03-14
出願番号
2023142830
出願日
2023-09-04
発明の名称
飛行体の制御システム、飛行体、飛行体の制御方法及びプログラム
出願人
株式会社SkyDrive
代理人
弁理士法人IPX
主分類
B64U
30/293 20230101AFI20250307BHJP(航空機;飛行;宇宙工学)
要約
【課題】離着陸スペースが狭い場所へ飛行体を着陸させることができる飛行体の制御システムを提供する。
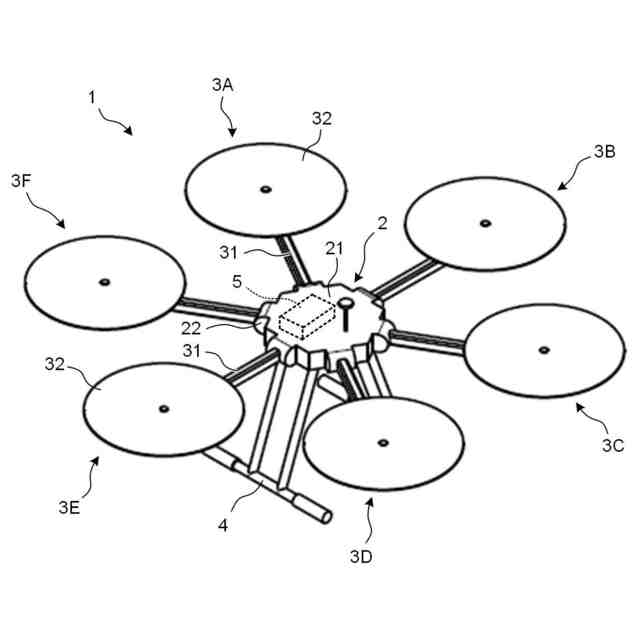
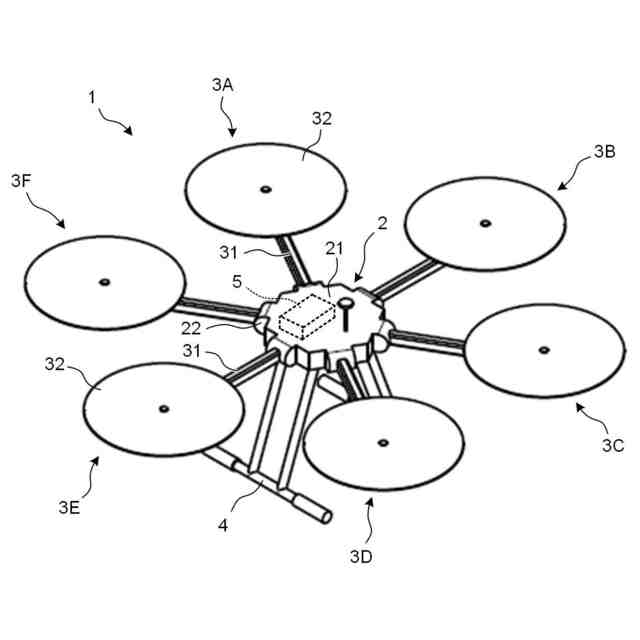
【解決手段】本発明の一態様によれば、プロペラをそれぞれ有する複数のアームを備える飛行体の制御システムが提供される。この制御システムは、次の各ステップを実行可能に構成されたプロセッサを備える。飛行制御ステップでは、プロペラの回転数及び回転方向を制御する。アーム制御ステップでは、飛行体の飛行中に、複数のアームのうち一部の折畳対象アームを、プロペラの回転によって浮力又は推力を発生させる展開位置と、平面視で展開位置よりも飛行体の内側に位置する収納位置との間で変位させる。
【選択図】図1
特許請求の範囲
【請求項1】
プロペラをそれぞれ有する複数のアームを備える飛行体の制御システムであって、
次の各ステップを実行可能に構成されたプロセッサを備え、
飛行制御ステップでは、前記プロペラの回転数及び回転方向を制御し、
アーム制御ステップでは、前記飛行体の飛行中に、前記複数のアームのうち一部の折畳対象アームを、前記プロペラの回転によって浮力又は推力を発生させる展開位置と、平面視で前記展開位置よりも前記飛行体の内側に位置する収納位置との間で変位させる、飛行体の制御システム。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の飛行体の制御システムにおいて、
前記アーム制御ステップでは、前記飛行体が下降を開始する際に、前記折畳対象アームを前記展開位置から前記収納位置に変位させる、飛行体の制御システム。
【請求項3】
請求項2に記載の飛行体の制御システムにおいて、
前記飛行制御ステップでは、前記飛行体の下降時に、前記複数のアームのうち前記展開位置にあるアームのプロペラ出力を水平飛行時のプロペラ出力よりも大きくする、飛行体の制御システム。
【請求項4】
請求項1に記載の飛行体の制御システムにおいて、
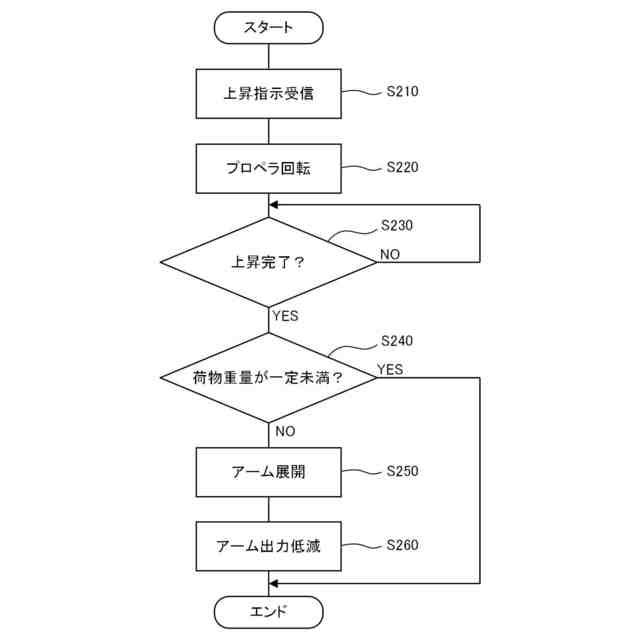
前記アーム制御ステップでは、前記飛行体の上昇中に前記折畳対象アームを前記収納位置に保持し、前記飛行体の上昇完了後に、前記折畳対象アームを前記展開位置に変位させる、飛行体の制御システム。
【請求項5】
請求項4に記載の飛行体の制御システムにおいて、
前記飛行制御ステップでは、前記飛行体の上昇時に、前記複数のアームのうち前記展開位置にあるアームのプロペラ出力を水平飛行時のプロペラ出力よりも大きくする、飛行体の制御システム。
【請求項6】
請求項1に記載の飛行体の制御システムにおいて、
前記アーム制御ステップでは、前記飛行体が保持する荷物の重量が一定値未満の場合、前記折畳対象アームを前記展開位置から前記収納位置に変位させる、飛行体の制御システム。
【請求項7】
請求項1に記載の飛行体の制御システムにおいて、
前記飛行体は、周囲の障害物との距離を測定するように構成されたセンサを備え、
前記アーム制御ステップでは、前記センサによって検出された前記距離が一定値以上の場合、前記折畳対象アームを前記収納位置から前記展開位置に変位させる、飛行体の制御システム。
【請求項8】
請求項1に記載の飛行体の制御システムとしての情報処理装置を備える、飛行体。
【請求項9】
飛行体の制御方法であって、
請求項1から請求項7のいずれか1項に記載の飛行体の制御システムの各ステップを備える、方法。
【請求項10】
プログラムであって、
コンピュータを、請求項1から請求項7のいずれか1項に記載の飛行体の制御システムとして機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行体の制御システム、飛行体、飛行体の制御方法及びプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
下記の文献に開示されるように、プロペラによって垂直離着陸が可能な飛行体(ドローン)は、荷物の運搬に使用される。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/124573号
【発明の概要】
【発明が解決しようとする課題】
【0004】
飛行体が荷物を運ぶ場所が山間部等の離着陸スペースが狭い場所である場合、飛行体が周囲の木などの障害物に接触する危険性がある。そのため、従来の飛行体では、このような場所への荷物の運搬が制限される。
【0005】
本発明では上記事情に鑑み、離着陸スペースが狭い場所へ飛行体を着陸させることができる飛行体の制御システムを提供することとした。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、プロペラをそれぞれ有する複数のアームを備える飛行体の制御システムが提供される。この制御システムは、次の各ステップを実行可能に構成されたプロセッサを備える。飛行制御ステップでは、プロペラの回転数及び回転方向を制御する。アーム制御ステップでは、飛行体の飛行中に、複数のアームのうち一部の折畳対象アームを、プロペラの回転によって浮力又は推力を発生させる展開位置と、平面視で展開位置よりも飛行体の内側に位置する収納位置との間で変位させる。
【0007】
このような態様によれば、離着陸時に複数のアームの一部を折り畳むことで、飛行体の地面への投影面積を小さくすることができる。そのため、離着陸スペースが狭い場所へ飛行体を着陸させることができる。
【図面の簡単な説明】
【0008】
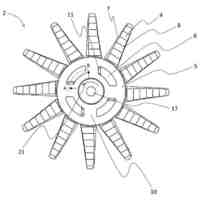
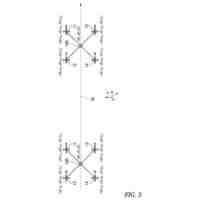
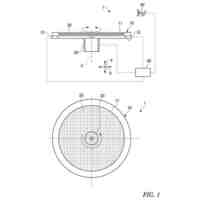
飛行体1を示す模式的な斜視図である。
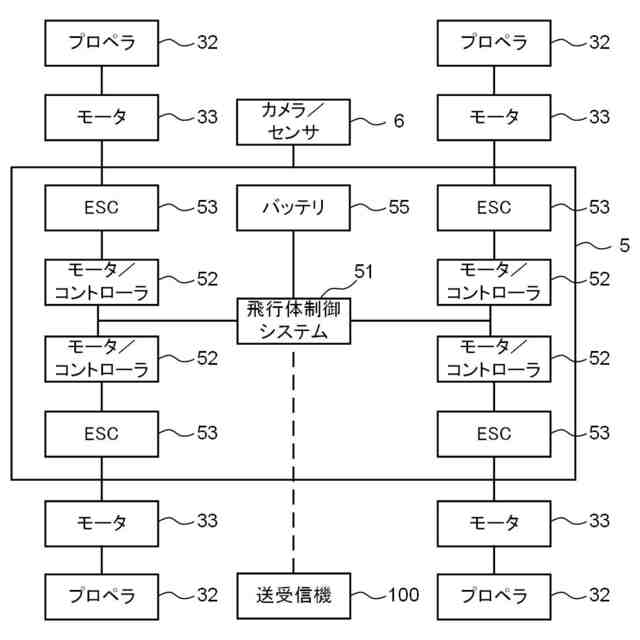
制御ボックス5の構成を示すブロック図である。
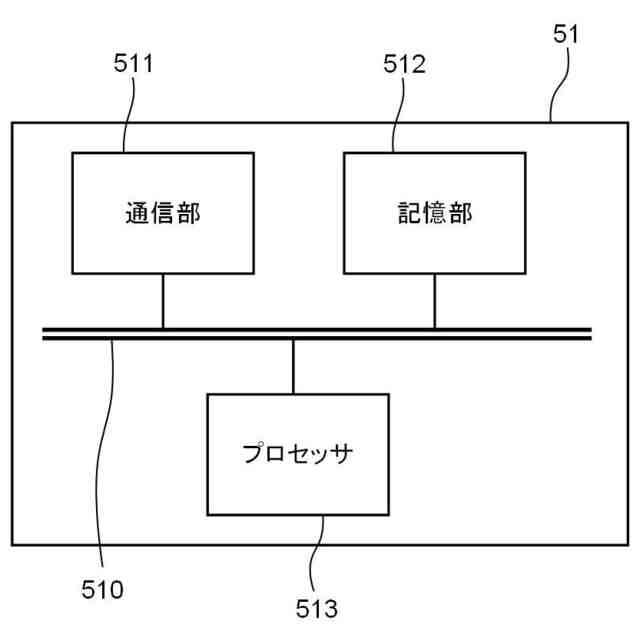
飛行体制御システム51のハードウェア構成を示すブロック図である。
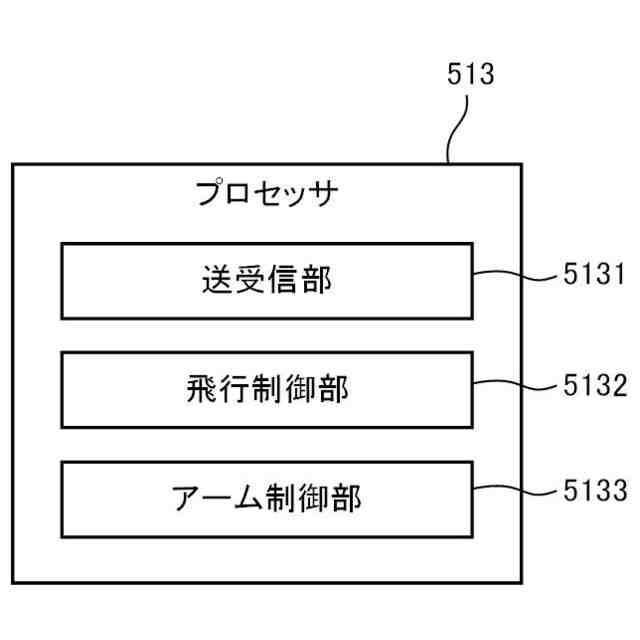
飛行体制御システム51(プロセッサ513)によって実現される機能を示すブロック図である。
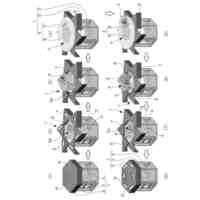
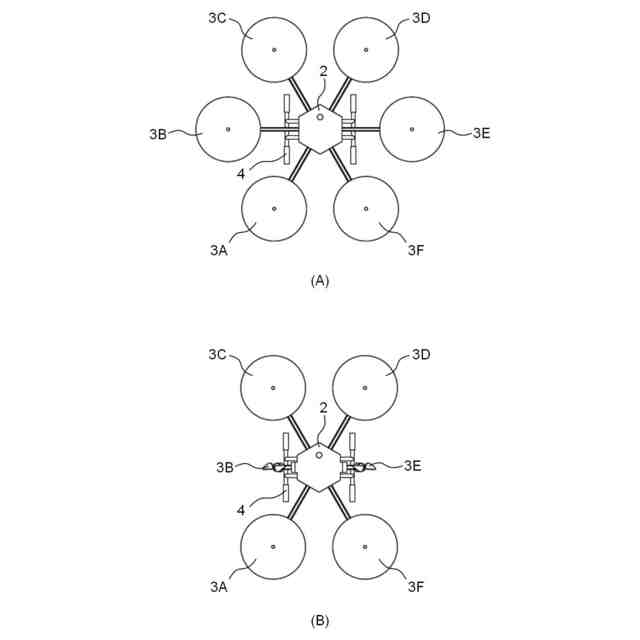
第2アーム3B及び第5アーム3Eを折畳対象アームとして折り畳んだ状態の飛行体1を示す模式的な斜視図である。
飛行体1の模式的な平面図である。
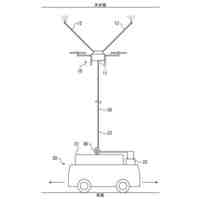
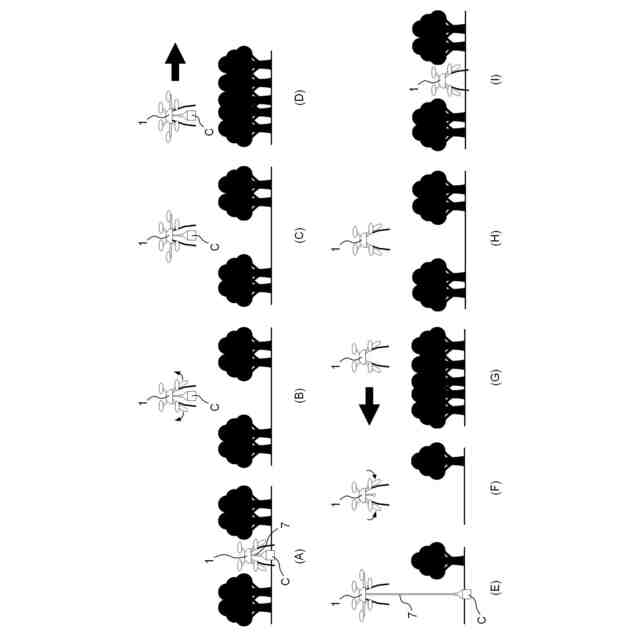
荷物Cを搬送する飛行体1の離陸から着陸までの流れの一例を示す模式図である。
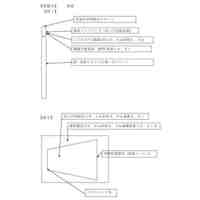
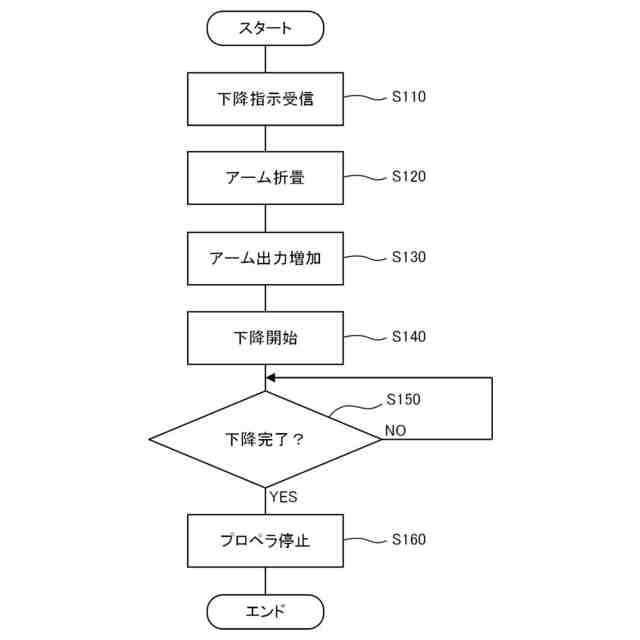
飛行体制御システム51が実行する飛行体1の下降時(着陸時)の処理の流れを示すフロー図である。
飛行体制御システム51が実行する飛行体1の上昇時(離陸時)の処理の流れを示すフロー図である。
【発明を実施するための形態】
【0009】
以下、図面を用いて本発明の実施形態について説明する。以下に示す実施形態中で示した各種特徴事項は、互いに組み合わせ可能である。
【0010】
ところで、本実施形態に登場するソフトウェアを実現するためのプログラムは、コンピュータが読み取り可能な非一時的な記録媒体(Non-Transitory Computer-Readable Medium)として提供されてもよいし、外部のサーバからダウンロード可能に提供されてもよいし、外部のコンピュータで当該プログラムを起動させてクライアント端末でその機能を実現(いわゆるクラウドコンピューティング)するように提供されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
26日前
個人
ドローンシステム
2か月前
個人
垂直離着陸機用エンジン改
2か月前
個人
ドローン消音装置
5か月前
個人
空中移動システム
3か月前
個人
ドローンを自動離着陸する方法
2か月前
トヨタ自動車株式会社
ドローン
13日前
個人
エアライナー全自動パラシュート
26日前
合同会社アドエア
パラシュート射出装置
26日前
合同会社アドエア
飛行体の落下補助装置
3か月前
株式会社ACSL
システム
1か月前
株式会社ACSL
システム
1か月前
株式会社SUBARU
移動体
3か月前
個人
垂直離着陸機用ガスタービンエンジン
2か月前
全日本空輸株式会社
ドーリシステム
5か月前
ミネベアミツミ株式会社
無人機
12日前
HDサービス合同会社
カメラ装着装置
5か月前
ミネベアミツミ株式会社
無人機
12日前
本田技研工業株式会社
移動体
6か月前
株式会社日立製作所
推進装置
4か月前
本田技研工業株式会社
航空機
6か月前
本田技研工業株式会社
航空機
6か月前
ライセン株式会社
無人飛行体搬送箱キャッチャー
6か月前
株式会社Piatto
液体上吹きシステム
6か月前
三菱重工業株式会社
搬送方法
2か月前
国立大学法人秋田大学
多孔板、翼吸引装置
8日前
個人
パッチアンテナ又は給電線路の取り付け部品
4か月前
個人
(宇宙ステーション補給機有人宇宙船改造。)
5か月前
ヤマコー株式会社
飛行用プロペラの製造方法
2日前
個人
飛行体の格納装置
5か月前
株式会社岩谷技研
飛翔体
12日前
株式会社日立製作所
長尺物の調査装置
5か月前
三菱重工業株式会社
離着陸パッド装置
22日前
公立大学法人大阪
プロペラのピッチ変更装置
21日前
株式会社日立製作所
立体構造宇宙機
2か月前
東レ株式会社
格子状構造体および格子状構造体の製造方法
6か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ