TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024132762
公報種別
公開特許公報(A)
公開日
2024-10-01
出願番号
2023061775
出願日
2023-03-17
発明の名称
無人飛行体搬送箱キャッチャー
出願人
ライセン株式会社
代理人
主分類
B64U
10/13 20230101AFI20240920BHJP(航空機;飛行;宇宙工学)
要約
【課題】無人飛行体搬送箱を簡単に保持し、リリースできる。搬送箱キャッチャーで、搬送箱を直接キャッチできるものが必要となっていた。又、サーボモーターを保護するため、荷重が直接サーボモーターに加わらないようにする必要があるという課題もあった。
【解決手段】搬送箱をドローン物流用として使えるようにドローン下部フレームに固定された主脚に固定された搬送箱キャッチャー用アームを左右に取付けて、アームを閉じて搬送箱を保持し、下部を開けてここから搬送箱を落下させる。
搬送箱はスプリング6の弾性力を使ってアームに自己保持する構造でアームを閉じれば、サーボモーターに力が加わらない。
【選択図】図1
特許請求の範囲
【請求項1】
無人飛行体で搬送する搬送箱を把持する装置であって、無人飛行体の主脚2間にヒンジ4を取り付け、前記ヒンジ4を回転支点として開閉し、搬送箱を把持するアーム5を垂直に取り付け、前記回転支点を前記アーム5の上端部近傍に設け、搬送箱の落下姿勢を規制するレール11を前記アーム5の開閉動作を干渉しない位置で、且つ前記レール11の搬送箱との接触面は前記アーム5が動く内側の面と同一面となるように取り付けられており、前記アーム5が開いて搬送箱が落下する際に、左右に移動する搬送箱に接触して過度に傾かないようにして落下させることを特徴とする物流用搬送箱キャッチャー。
続きを表示(約 150 文字)
【請求項2】
請求項1記載のアーム5の上部と下部を内側に約90°に曲げ、下部の曲げ部は搬送箱の底を受けて荷重を支え、上部の曲げ部にスプリング6を下向けに取付け、下部の曲げ部と、上部の前記スプリング6の弾性力で搬送箱13を自己保持することを特徴とする請求項1記載の搬送箱キャッチャー。
発明の詳細な説明
【技術分野】
【0001】
無人飛行体=ドローンと言う。
本発明は、ドローンを物流用として使用するための搬送箱キャッチャーに関するものである。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
近年ドローンなどの無人飛行体を用いた宅配サービスが始まろうとしている。
無人飛行体を用いた宅配サービス技術として特許文献1~3などが提案されている。
従来の宅配サービスは陸送で主に、商品を段ボール箱に詰めて、配送が行われている。
ドローンにおいても、同様に搬送箱を載み込み、運搬目的地に到着するとドローンを着陸させ搬送箱を切り離して宅配が可能な飛行体が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-85900
特開2020-59483
特開2017-105242
【発明の概要】
【発明が解決しようとする課題】
【0004】
先行技術では、ドローンにアームを取付け、左右から挟み込み保持する構造が示されているが、搬送箱の上下方向が保持されておらず運行中は押えが効かないため搬送箱が不安定となってしまう。又、アームを開く時に左右のアームと箱底面とのすべり抵抗差により片側のアームに搬送箱が引掛り、搬送箱がまっすぐ落下しないという問題があった。
【課題を解決するための手段】
【0005】
無人飛行体で搬送する搬送箱を把持する装置であって、無人飛行体の主脚2間にヒンジ4を取り付け、前記ヒンジ4を回転支点として開閉し、搬送箱を把持するアーム5を垂直に取り付け、前記回転支点を前記アーム5の上端部近傍に設け、搬送箱の落下姿勢を規制するレール11を前記アーム5の開閉動作を干渉しない位置で、且つ前記レール11の搬送箱との接触面は前記アーム5が動く内側の面と同一面となるように取り付けられており、前記アーム5が開いて搬送箱が落下する際に、左右に移動する搬送箱に接触して過度に傾かないようにして落下させる。
さらにアーム5の上部と下部を内側に約90°に曲げ、下部の曲げ部は搬送箱の底を受けて荷重を支え、上部の曲げ部にスプリング6を下向けに取付け、下部の曲げ部と、上部の前記スプリング6の弾性力で搬送箱13を自己保持することを特徴とする。
【発明の効果】
【0006】
この搬送箱に段ボール箱を使うと段ボール箱をアームで直接キャッチできるようになる。段ボール箱はアームに自己保持しているのでサーボモーター7が故障しても飛行途中で落下する危険も少なく、配送先に段ボールを傾けずにまっすぐ落下させて配送することができるようになる。そうすると、専用の搬送箱のようにわざに回収する必要がなく、通常の紙リサイクルの中に組込まれてコストがかからなくなる。
【図面の簡単な説明】
【0007】
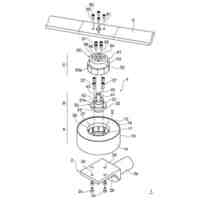
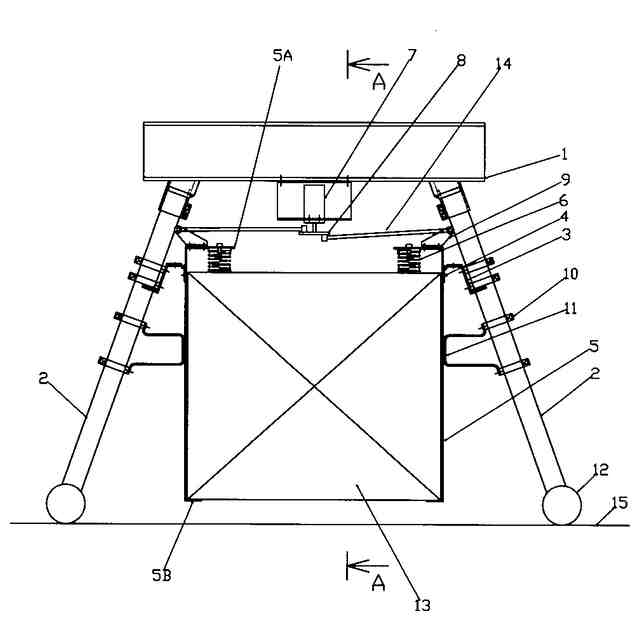
搬送箱キャッチャーの閉じた時の正面図
搬送箱キャッチャーの開いた時の正面図
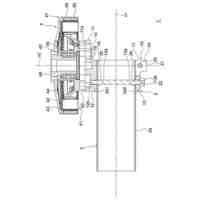
搬送箱キャッチャーの閉じた時の断面図
搬送箱キャッチャーヒンジ部の拡大図
レールに板スプリングを取付けた拡大図
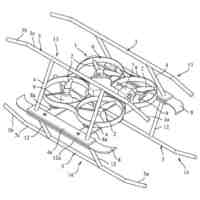
ドローンに搬送箱を組込んだ時の正面図(把持時)
ドローンに搬送箱を組込んだ時の側面図(把持時)
【発明を実施するための形態】
【0008】
発明の実施の形態を実施例に基づき図面を参照して説明する。
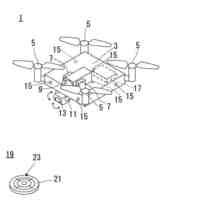
図1、図2においてドローン下部フレーム1から主脚2が左右に2本ずつ取付けてあり、下部端で副脚12に接続されている。
この主脚にアーム5を動かすヒンジ4を取付けるための金物3を取付け、金物3にヒンジ4の片側を固定し、もう片側をアーム5に取付ける。
アーム5は上部5Aと下端5Bがコの字形に曲げられており、上部5Aにはスプリング6が取付してあり、下部5Bは搬送箱13が落下しないように搬送箱下面を受けている。
アーム5の上部5Aにホーン9が取付けられており、下部フレーム1に固定されたサーボモーター7とサーボホーン8とロッド14で繋がっており、サーボモーター7を回転させる事によりアーム5を引張り下部5Bを開かせることができるようになっている。
アーム5のヒンジ4は搬送箱13の上面の位置近くの上側とし、搬送箱上部の位置が左右に動かないようにしている。
図4にヒンジ部の拡大図を示す。
ヒンジ4の位置は重要で搬送箱上面より上で、搬送箱上面に近接した位置にもうける必要がある。ドローンへの搬送箱13のセット方法は、搬送箱13を下から押し上げてスプリング6を縮めながら送信機(図示せず)の信号でサーボモーター7を回転させてアームを閉じて保持させる。
アーム5を閉じてしまえば搬送箱13はスプリング6の力でアーム5の下部5B部に押し付け自己保持されサーボモーター7に力が加わらない。
又、サーボモーター7は180°近く回転させることによりサーボロックすることができ、前記自己保持との二重ロックをかけることができ、ドローン飛行中に搬送箱13に加わる力がサーボモーター7に伝わらないようになっている。このため飛行中に搬送箱13が落下する危険が無くなる。
着陸後荷物を落下させるにはサーボ7のホーンを回転させロッド14を引張り、アーム5の下部をヒンジ4の回転軸を中心に開けることにより行う。
その時には搬送箱13の下面とアーム5下部5Bのすべり抵抗差により搬送箱13が左右どちらかのアーム5に引掛り、まっすぐに落下しないので左右の主脚2に固定したレール11を取付け、ヒンジ4の位置で搬送箱上部が左右に動かないようにし、レール11で搬送箱中部が左右に動かないようにし、搬送箱13が傾かないようにし、まっすぐ落下させる。
図3においてアーム5にはレール11が貫通するための開口16が開いている。
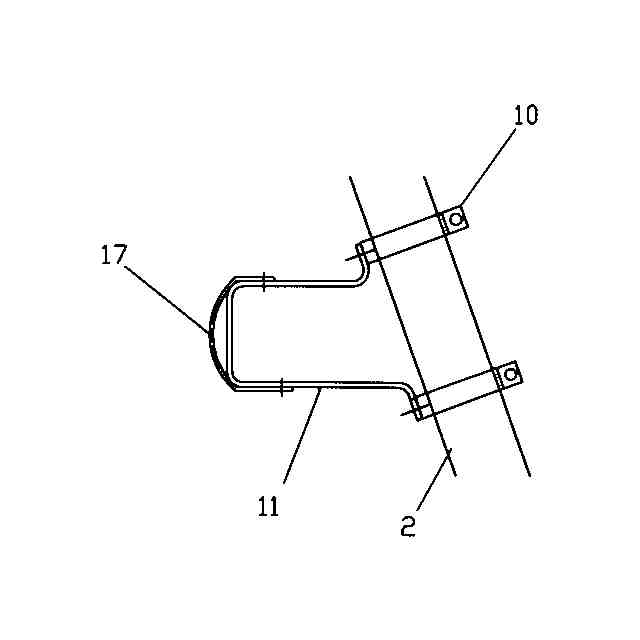
図5に示すようにレール11と搬送箱13とのすべり面にゴムや弓状の板スプリング17を挟み摩擦抵抗で、搬送箱の落下スピードを落とすこともできる。
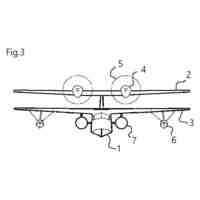
図6には搬送箱をドローンに組込んだ時の正面図を示す。
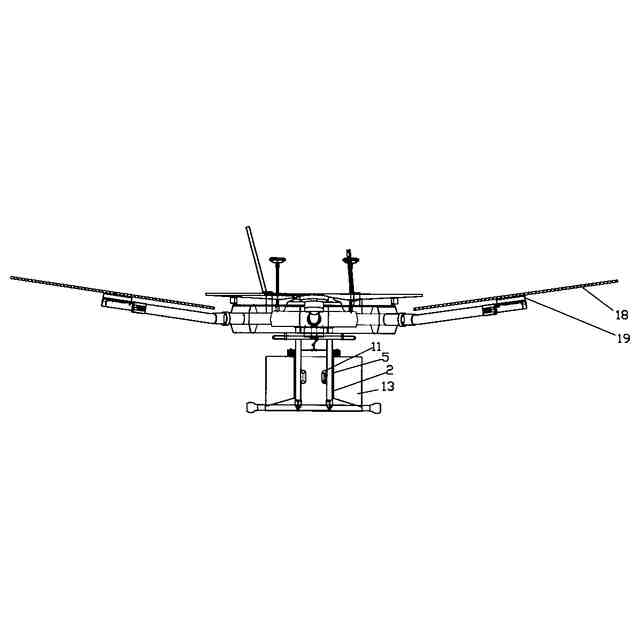
図7には搬送箱をドローンに組込んだ時の側面図を示す。
【符号の説明】
【0009】
1 無人飛行体下部フレーム
2 主脚
3 主脚とヒンジ接続金物
4 ヒンジ
5 アーム
6 スプリング
7 サーボモーター
8 サーボホーン
9 アームホーン
10 主脚とレール接続金物
11 レール
12 副脚
13 搬送箱(段ボール箱)
14 ロッド
15 地面
16 アームのレール用開口
17 レールに取付けた弓状の板スプリング
18 プロペラ
19 モーター
5A L字に曲げられたアームの上部
5B L字に曲げられたアームの下部
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
2か月前
個人
着火ドローン
5日前
個人
救難消防飛行艇
15日前
個人
ドローンシステム
4か月前
株式会社三圓
浮上装置
8か月前
個人
陸海空用の乗り物
1か月前
個人
連続回転可能な飛行機翼
25日前
個人
ドローンの計測操作方法3
9か月前
個人
ドローンの計測操作方法2
9か月前
個人
垂直離着陸機用エンジン改
4か月前
個人
飛行艇
10か月前
キヤノン電子株式会社
磁気トルカ
9か月前
個人
ドローンを自動離着陸する方法
4か月前
個人
ドローン消音装置
7か月前
個人
空中移動システム
5か月前
個人
エアライナー全自動パラシュート
2か月前
トヨタ自動車株式会社
ドローン
2か月前
株式会社小糸製作所
飛行体ポート
26日前
株式会社ACSL
システム
3か月前
株式会社ACSL
システム
3か月前
合同会社アドエア
パラシュート射出装置
2か月前
合同会社アドエア
飛行体の落下補助装置
5か月前
個人
搬送方法および搬送システム
1日前
全日本空輸株式会社
ドーリシステム
7か月前
個人
垂直離着陸機用ガスタービンエンジン
4か月前
株式会社SUBARU
移動体
5か月前
HDサービス合同会社
カメラ装着装置
7か月前
管清工業株式会社
地中管内の調査装置
18日前
ミネベアミツミ株式会社
無人機
2か月前
川崎重工業株式会社
水素航空機
25日前
ミネベアミツミ株式会社
無人機
2か月前
株式会社小糸製作所
航空機用灯具
9か月前
本田技研工業株式会社
航空機
8か月前
本田技研工業株式会社
航空機
8か月前
株式会社 雲田商会
管路調査用ドローン
14日前
本田技研工業株式会社
移動体
9か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ