TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025037314
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144158
出願日
2023-09-06
発明の名称
離着陸パッド装置
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
主分類
B64U
70/99 20230101AFI20250311BHJP(航空機;飛行;宇宙工学)
要約
【課題】離陸時における風の影響を低減して、安定した離陸を行うことのできるパッドを提供すること。
【解決手段】無人航空機の離着陸パッド装置は、離着陸面を備えるパッドと、無人航空機をパッドに係留する係留機構と、係留機構とともにパッドを回転させる駆動源と、係留機構および駆動源との動作を制御するコントローラと、を備える。
コントローラは、取得する風向きに関する情報に基づいて、離着陸面に載る無人航空機の機首が風向きに対向するように駆動源を回転駆動させる。
【選択図】図1
特許請求の範囲
【請求項1】
離着陸面を備えるパッドと、
無人航空機を前記パッドに係留する係留機構と、
前記係留機構とともに前記パッドを回転させる駆動源と、
前記係留機構および前記駆動源との動作を制御するコントローラと、を備え、
前記コントローラは、
取得する風向きに関する情報に基づいて、前記離着陸面に載る前記無人航空機の機首が前記風向きに対向するように前記駆動源を回転駆動させる、
無人航空機の離着陸パッド装置。
続きを表示(約 590 文字)
【請求項2】
前記コントローラは、
付設される風向計から前記風向きに関する情報を取得するか、または、
提供されている天候に関する情報から前記風向きに関する情報を取得する、
請求項1に記載の離着陸パッド装置。
【請求項3】
前記コントローラは、
前記パッドの回転方向の位置に基づいて、前記駆動源を回転駆動させるか、または、
前記離着陸面に載る前記無人航空機の機首の位置を検知して、前記駆動源を回転駆動させる、
請求項1に記載の離着陸パッド装置。
【請求項4】
前記パッドを傾転させる傾転機構を備え、
前記コントローラは、
前記機首が前記風向きに対向する状態において、取得する風速に関する情報に基づいて、傾転機構を駆動させる、
請求項1に記載の離着陸パッド装置。
【請求項5】
前記コントローラは、
前記離着陸面に載る、離陸する前の前記無人航空機について取得する実測推力または前記無人航空機が備えるロータの回転数に基づいて、前記係留機構による前記無人航空機の係留を解く、
請求項1に記載の離着陸パッド装置。
【請求項6】
前記係留機構は、
磁力により前記無人航空機を係留する、
請求項5に記載の離着陸パッド装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、無人航空機(Unmanned Aerial Vehicle:UAV)が離着陸するのに好適なパッドに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
パッドからUAVを離着陸させることが知られている。なお、無人航空機としてドローンと称されるものも周知であるが、本開示においては、ドローンはUAVと同義として扱う。パッドとポートについても同義として扱う。
【0003】
特許文献1は、ドローン離着陸時の横風の影響を低減し、離着陸時の着陸精度と安全性を向上できるポートを開示する。特許文献1のドローンポートは、離着陸面の外周を囲む防護壁と、防護壁の上端に設けられ横風により発生する乱気流を低減する乱気流低減装置とを備える。防護壁は、外側に位置する強度壁と内側に位置するソフト壁とを有する。ドローンポートは、さらに、ドローンによるダウンウォッシュを防護壁の下方から下向き又は斜め下向きに外部に流すダウンウォッシュ排気口を有する。
【先行技術文献】
【特許文献】
【0004】
特開2021-32017号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のポートによれば、ドローン離着陸時の横風による影響を低減することができ、かつ乱気流の発生を抑制または低減して安定した姿勢制御を可能にする。
しかし、特許文献1のポートは、相当の高さを有する防護壁を有することを前提としており、ドローンの例えば回転翼が防護壁に接触する可能性を否定できない。実際、特許文献1は、防護壁への回転翼の衝突による破損を防ぐために、防護壁の内側をソフト壁にしている。
以上より、本開示は、特に離陸時における風の影響を低減して、安定した離陸を行うことのできるパッドを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る無人航空機の離着陸パッド装置は、
離着陸面を備えるパッドと、
無人航空機をパッドに係留する係留機構と、
係留機構とともにパッドを回転させる駆動源と、
係留機構および駆動源との動作を制御するコントローラと、を備える。
本開示のコントローラは、
取得する風向きに関する情報に基づいて、離着陸面に載る無人航空機の機首が風向きに対向するように駆動源を回転駆動させる。
【発明の効果】
【0007】
本開示によれば、取得する風向きに関する情報に基づいて、離着陸面に載る無人航空機の機首が風向きに対向するように、つまり機首が風上を向くように駆動源を回転駆動させる。機首が風向きに対向していれば、安定した離陸が行える。
【図面の簡単な説明】
【0008】
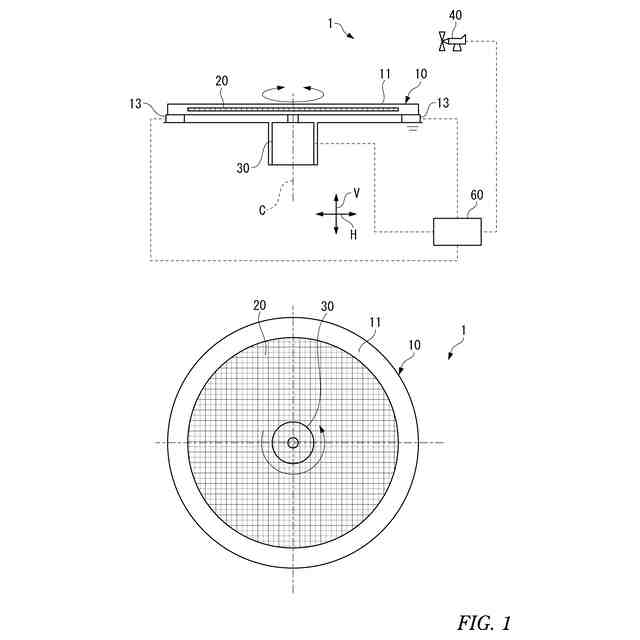
第1実施形態に係る離着陸パッド装置の概略構成を示す側面図(上)および平面図(下)である。
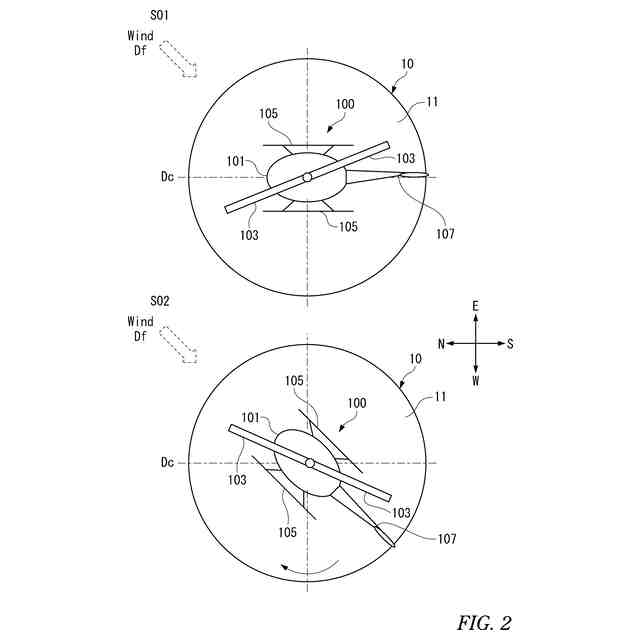
第1実施形態に係る離着陸パッド装置の動作を説明する図である。
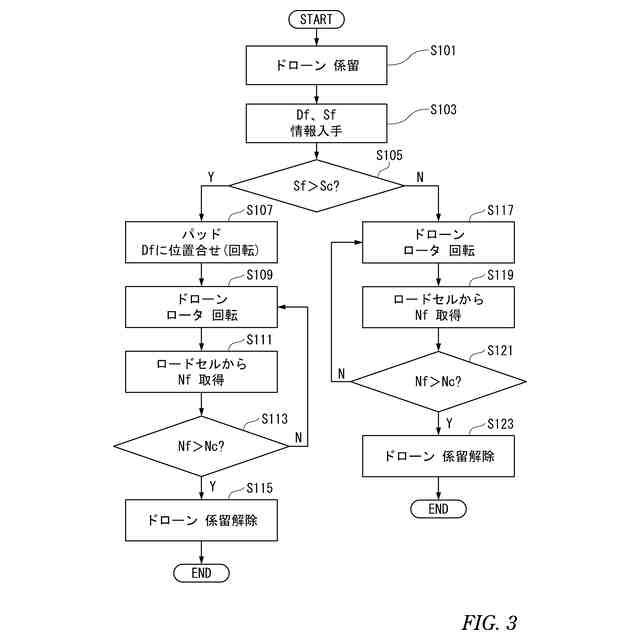
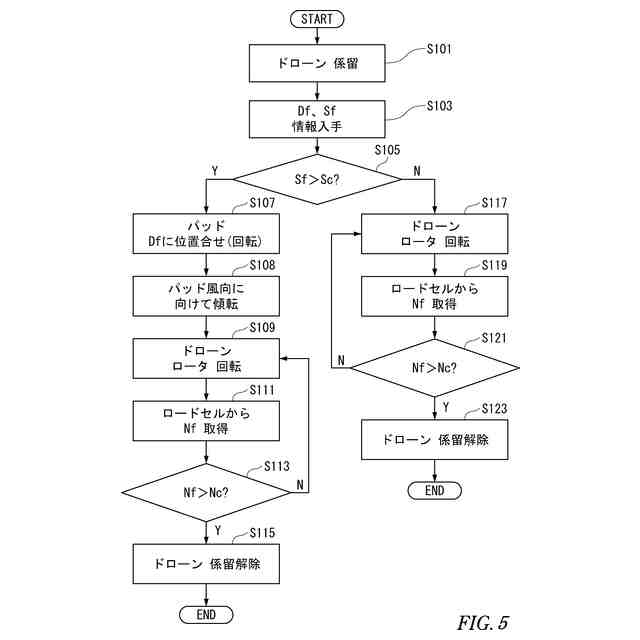
第1実施形態に係る離着陸パッド装置の制御手順を示すフロー図である。
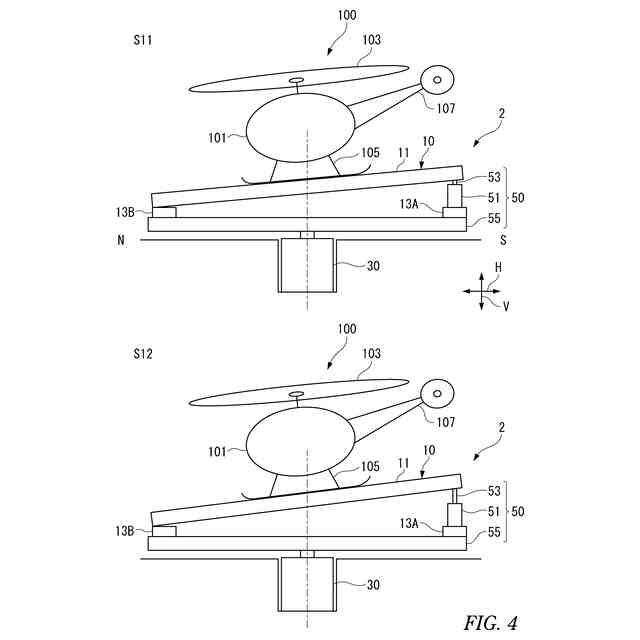
第2実施形態に係る離着陸パッド装置の動作を説明する側面図である。
第2実施形態に係る離着陸パッド装置の制御手順を示すフロー図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら、離着陸パッド装置の実施形態について説明する。
〔第1実施形態〕
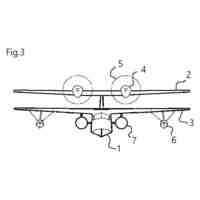
離着陸パッド装置1は、周辺の風向きに応じてドローン100(図3)の機首101が風上に向くように、ドローン100が載るパッド10を回転動作させる。つまり、離着陸パッド装置1はドローン100が離陸する時は正面から風が吹いている状況を作り出すことにより、安定した離陸を実現できる。
【0010】
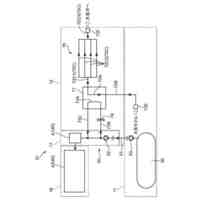
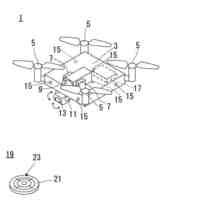
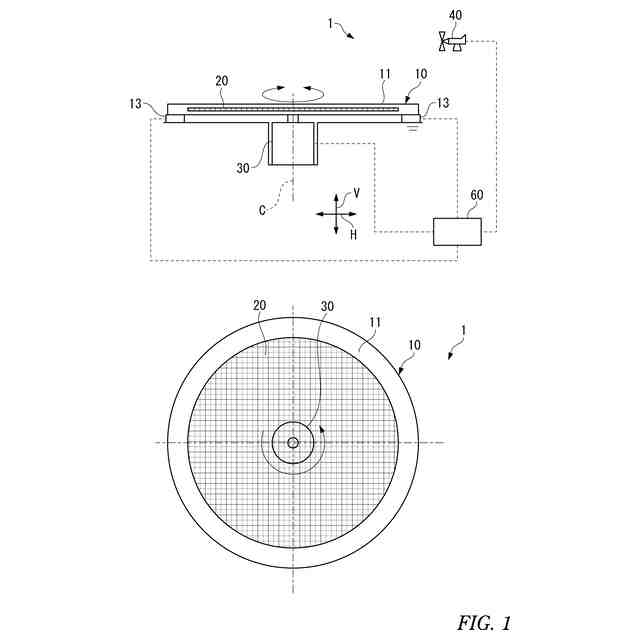
[離着陸パッド装置1の全体構成:図1参照]
離着陸パッド装置1は、離着陸面11を備えるパッド10と、ドローン100をパッド10に係留する係留機構としての電磁石20と、電磁石20とともにパッド10を回転させる駆動源としての電動モータ30と、電磁石20および電動モータ30の動作を制御するコントローラ60と、を備える。離着陸パッド装置1は、パッド10の近隣に風向風速計40を備えており、風向風速計40で計測される風向に関する情報(実測風向Df)および風速に関する情報(実測風速Sf)は、コントローラ60に提供される。コントローラ60は、取得する風向情報および風速情報に基づいて、電動モータ30、電磁石20などの動作を制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
2か月前
個人
救難消防飛行艇
4日前
個人
ドローンシステム
4か月前
個人
連続回転可能な飛行機翼
14日前
個人
陸海空用の乗り物
1か月前
株式会社三圓
浮上装置
8か月前
個人
飛行艇
10か月前
個人
垂直離着陸機用エンジン改
3か月前
個人
ドローンの計測操作方法3
8か月前
個人
ドローンの計測操作方法2
8か月前
キヤノン電子株式会社
磁気トルカ
9か月前
個人
ドローン消音装置
6か月前
個人
空中移動システム
5か月前
個人
ドローンを自動離着陸する方法
4か月前
トヨタ自動車株式会社
ドローン
2か月前
個人
エアライナー全自動パラシュート
2か月前
株式会社ACSL
システム
2か月前
株式会社ACSL
システム
2か月前
株式会社セネック
ドローンポート
11か月前
合同会社アドエア
飛行体の落下補助装置
5か月前
株式会社セネック
ドローンポート
11か月前
株式会社小糸製作所
飛行体ポート
15日前
合同会社アドエア
パラシュート射出装置
2か月前
個人
垂直離着陸機用ガスタービンエンジン
4か月前
株式会社SUBARU
移動体
5か月前
全日本空輸株式会社
ドーリシステム
7か月前
ミネベアミツミ株式会社
無人機
2か月前
ミネベアミツミ株式会社
無人機
2か月前
HDサービス合同会社
カメラ装着装置
6か月前
川崎重工業株式会社
水素航空機
14日前
管清工業株式会社
地中管内の調査装置
7日前
株式会社SUBARU
構造体の製造方法
9か月前
株式会社SUBARU
構造体の製造方法
9か月前
株式会社 雲田商会
管路調査用ドローン
3日前
株式会社デンソー
推進装置
10か月前
本田技研工業株式会社
移動体
9か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ