TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025035630
公報種別
公開特許公報(A)
公開日
2025-03-14
出願番号
2023142802
出願日
2023-09-04
発明の名称
作業支援システム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
G06Q
50/04 20120101AFI20250307BHJP(計算;計数)
要約
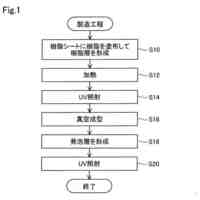
【課題】所定の作業が未だ完了していないにも拘わらず、所定の作業が完了したと判定してしまうことを抑制できるようにすること。
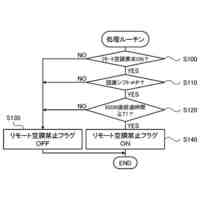
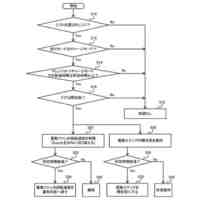
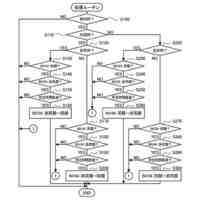
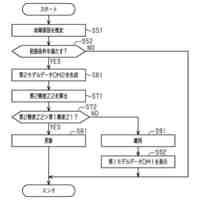
【解決手段】制御装置は、第1画像に写っている作業者の骨格座標の時系列データを取得する(S13)。制御装置は、作業位置から作業者までの距離DISが距離判定値DISth以上であるか否かを判定する(S17)。制御装置は、骨格座標の時系列データに基づいて、所定の完了動作を作業者が行ったか否かを判定する(S19)。制御装置は、上記距離DISが距離判定値DISth以上であると判定している状況下で(S17:YES)、作業者が完了動作を行ったと判定した場合に(S19:YES)、所定の作業が完了したと判定する。
【選択図】図6
特許請求の範囲
【請求項1】
作業位置で所定の作業を行う作業者を撮像する撮像装置と、
前記撮像装置によって撮像された画像を取得する制御装置と、を備えた作業支援システムであって、
前記制御装置は、
前記画像に写っている前記作業者の骨格座標の時系列データを取得することと、
前記作業位置から前記作業者までの距離が距離判定値以上であるか否かを判定することと、
前記骨格座標の時系列データに基づいて、前記所定の作業が完了したことを示す動作である所定の完了動作を前記作業者が行ったか否かを判定することと、
前記作業位置から前記作業者までの距離が前記距離判定値以上であると判定している状況下で、前記作業者が前記完了動作を行ったと判定した場合に、前記所定の作業が完了したと判定することと、を実行する
作業支援システム。
続きを表示(約 760 文字)
【請求項2】
前記完了動作は、第1動作と、前記第1動作とは異なる第2動作と、を含んでおり、
前記制御装置は、前記骨格座標の時系列データに基づいて、前記作業者が前記第1動作を行ったこと、及び、当該作業者が前記第2動作を行ったことの何れをも確認した場合に、当該作業者が前記完了動作を行ったと判定する
請求項1に記載の作業支援システム。
【請求項3】
前記制御装置は、前記骨格座標の時系列データに基づいて、前記作業者が前記第1動作を行い、その後に当該作業者が前記第2動作を行ったことを確認した場合に、当該作業者が前記完了動作を行ったと判定する
請求項2に記載の作業支援システム。
【請求項4】
前記所定の作業は、前記作業位置に搬送されてきた搬送品に対する作業であり、
前記搬送品を所定の搬送方向に搬送する搬送装置を備え、
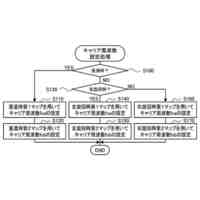
前記制御装置は、前記搬送品に対する前記所定の作業が完了したと判定した場合に、当該搬送品を前記作業位置から搬出させた上で、新たな搬送品を当該作業位置に搬送させるように前記搬送装置を制御する
請求項1~請求項3のうち何れか一項に記載の作業支援システム。
【請求項5】
前記制御装置は、機械学習が施された学習済みモデルを有し、
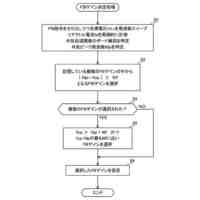
前記学習済みモデルは、前記骨格座標の時系列データが入力された際に、前記作業者が前記完了動作を行った可能性の高さを示す指標値を出力するようになっており、
前記制御装置は、前記学習済みモデルに前記骨格座標の時系列データを入力した際に当該学習済みモデルから出力された指標値に基づいて、前記作業者が前記完了動作を行ったか否かを判定する
請求項1に記載の作業支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、所定の作業位置で作業者が作業を行うことを支援するための作業支援システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、ベルトコンベヤによって作業位置まで搬送されたワークを作業者が組み立てることを支援するシステムを開示している。
【先行技術文献】
【特許文献】
【0003】
特開2010-108186号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業者によるワークの組み立てが完了した場合、ベルトコンベヤによって、当該ワークが作業者の作業位置から搬出された上で、新たなワークが当該作業位置に搬送される。作業者によるワークの組み立てが完了したことを判定する手法として、例えば、ボタンなどの特定の装置を作業者に操作させる方法を挙げることができる。作業者は、ワークの組み立てを完了させると、特定の装置を操作する。すると、組み立てが完了したことが確認できるため、ワークが作業位置から搬出された上で、次のワークが当該作業位置に搬送される。
【0005】
しかしながら、ワークの組み立て途中で、特定の装置を作業者が誤って操作してしまうことがある。この場合、ワークの組み立てが未だ完了していないにも拘わらず、組み立てが完了したと判断されてしまう。
【課題を解決するための手段】
【0006】
上記課題を解決するための作業支援システムは、作業位置で所定の作業を行う作業者を撮像する撮像装置と、前記撮像装置によって撮像された画像を取得する制御装置と、を備えた作業支援システムであって、前記制御装置は、前記画像に写っている前記作業者の骨格座標の時系列データを取得することと、前記作業位置から前記作業者までの距離が距離判定値以上であるか否かを判定することと、前記骨格座標の時系列データに基づいて、前記所定の作業が完了したことを示す動作である所定の完了動作を前記作業者が行ったか否かを判定することと、前記作業位置から前記作業者までの距離が前記距離判定値以上であると判定している状況下で、前記作業者が前記完了動作を行ったと判定した場合に、前記所定の作業が完了したと判定することと、を実行する。
【0007】
なお、前記制御装置は、作業者が前記完了動作を行ったか否かを判定する際に、機械学習が施された学習済みモデルを利用してもよい。
【発明の効果】
【0008】
上記作業支援システムは、所定の作業が未だ完了していないにも拘わらず、所定の作業が完了したと判定してしまうことを抑制できるという効果を奏する。
【図面の簡単な説明】
【0009】
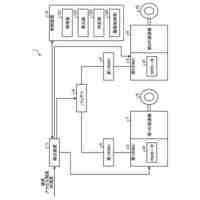
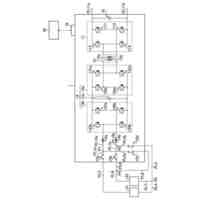
図1は、実施形態の作業支援システムの概略を示す構成図である。
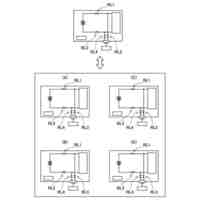
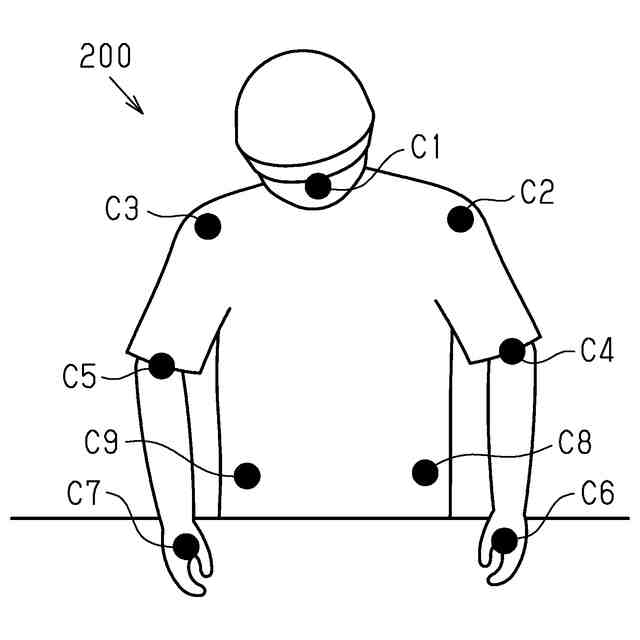
図2は、骨格座標の設定態様の一例を示す図である。
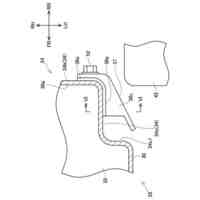
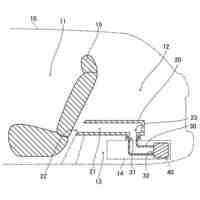
図3は、図1の作業支援システムにおいて、作業者が作業位置から離れた様子を示す模式図である。
図4は、完了作業のうちの第1動作の一例を示す図である。
図5は、完了作業のうちの第2動作の一例を示す図である。
図6は、図1の作業支援システムが備える制御装置によって実行される処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、作業支援システムの一実施形態を図1から図6に従って説明する。
<作業支援システムの全体構成>
図1に示すように、作業支援システム10は、所定の搬送方向Zに搬送品100を搬送する搬送装置20を備えている。搬送装置20は、ベルトコンベヤ21の搬送面211に搬送品100を載置した状態で所定の搬送方向Zに搬送品100を搬送する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
方法
12日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
9日前
トヨタ自動車株式会社
自動車
16日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
電動車
8日前
トヨタ自動車株式会社
組電池
12日前
トヨタ自動車株式会社
充電器
17日前
トヨタ自動車株式会社
駆動装置
8日前
トヨタ自動車株式会社
ステータ
8日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
表示装置
8日前
トヨタ自動車株式会社
制御装置
16日前
トヨタ自動車株式会社
配車装置
8日前
トヨタ自動車株式会社
駆動装置
1日前
トヨタ自動車株式会社
充電装置
8日前
トヨタ自動車株式会社
製造方法
17日前
トヨタ自動車株式会社
駆動装置
8日前
トヨタ自動車株式会社
触媒装置
8日前
トヨタ自動車株式会社
電源装置
8日前
トヨタ自動車株式会社
電動車両
10日前
トヨタ自動車株式会社
検査装置
10日前
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
シール構造
8日前
トヨタ自動車株式会社
電池パック
16日前
トヨタ自動車株式会社
電気自動車
17日前
トヨタ自動車株式会社
プログラム
2日前
トヨタ自動車株式会社
全固体電池
16日前
トヨタ自動車株式会社
電池冷却器
10日前
トヨタ自動車株式会社
電力変換装置
9日前
トヨタ自動車株式会社
情報処理装置
16日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ