TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025034466
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023140858
出願日
2023-08-31
発明の名称
船舶を制御するためのシステムおよび方法
出願人
ヤマハ発動機株式会社
代理人
弁理士法人新樹グローバル・アイピー
,
個人
主分類
B63H
21/21 20060101AFI20250306BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
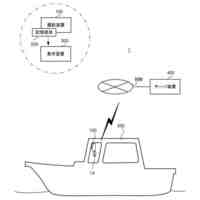
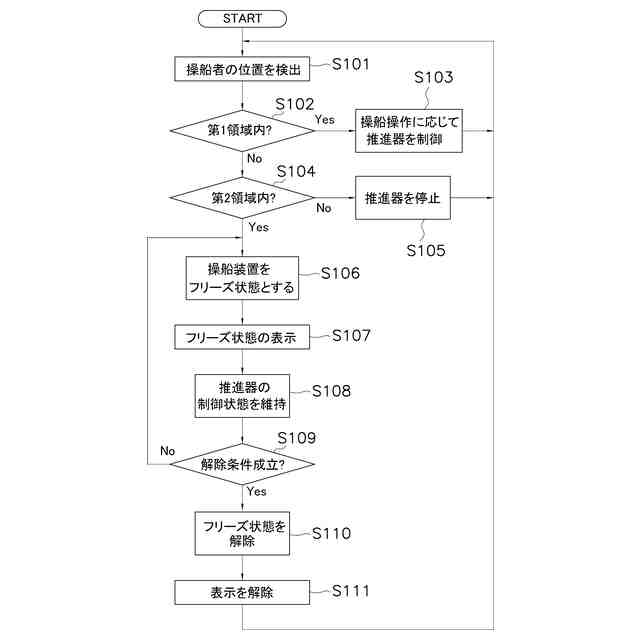
【課題】操船者が落水した場合には、船舶を停止または減速させると共に、操船者が操船位置から離れたときに、船舶推進器が誤操作されることを抑える。
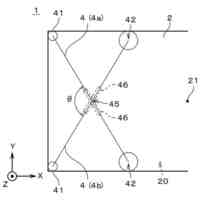
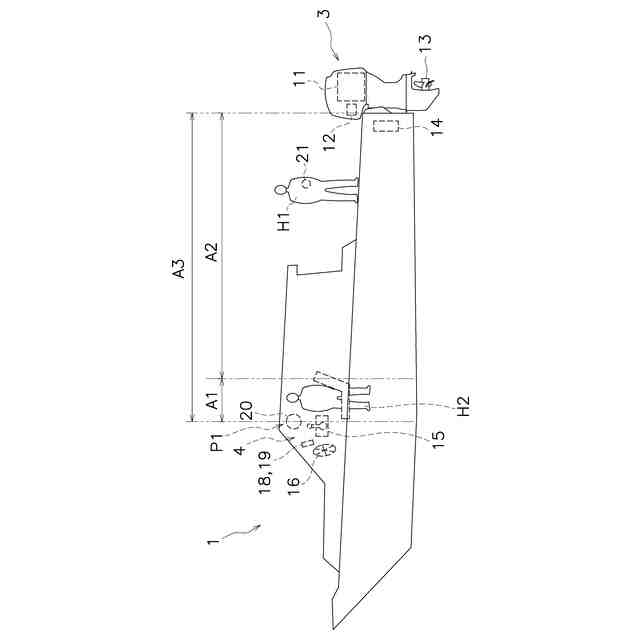
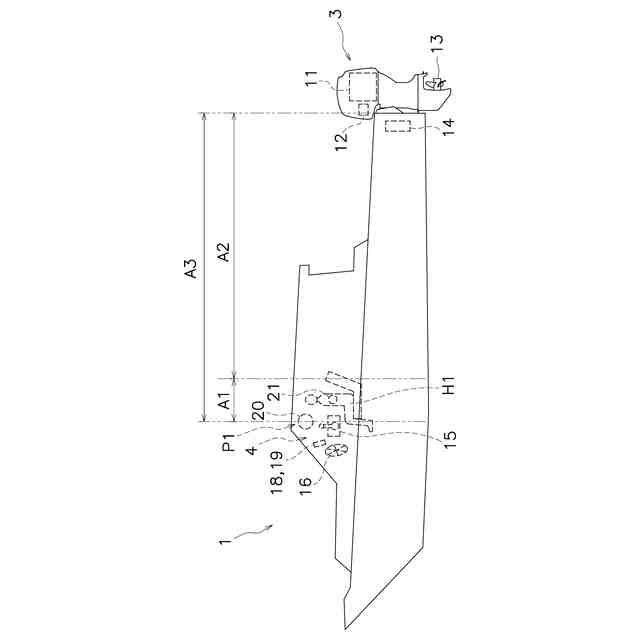
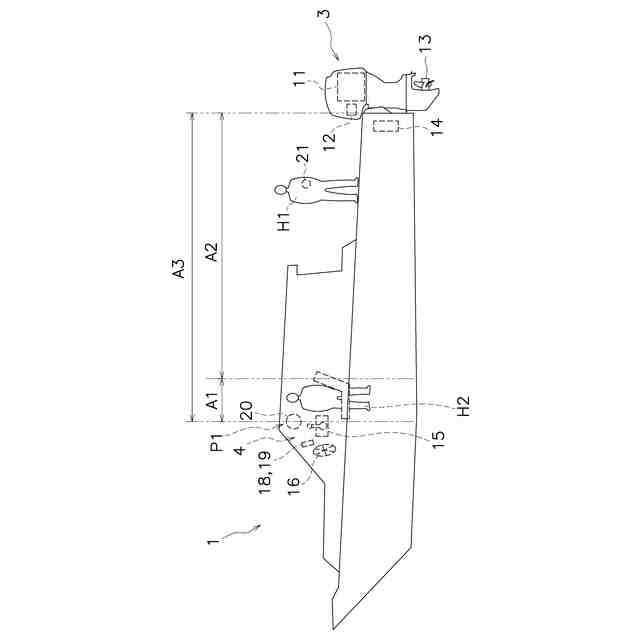
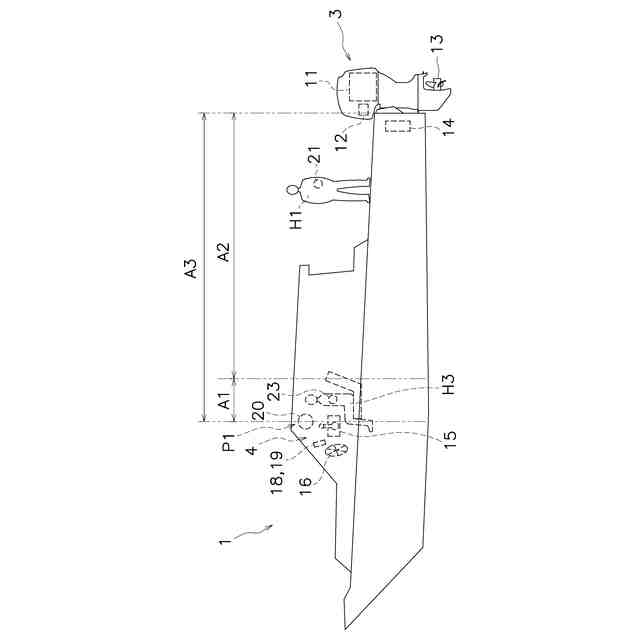
【解決手段】システムは、センサ20とコントローラ30とを備える。センサ20は、操船者H1の位置を検出する。コントローラ30は、操船者H1が、操船位置P1を含む許可エリアA3内に居ない場合には、船舶推進器3を停止させる、又は、船舶1を減速させるように船舶推進器3を制御する。コントローラ30は、操船者H1が第1領域A1内に居る場合には、操船装置4への操作に応じて船舶推進器3を制御する。コントローラ30は、操船者H1が、許可エリアA3内において第1領域A1よりも操船位置P1から遠い第2領域A2内に居る場合には、操船装置4をフリーズ状態とする。コントローラ30は、フリーズ状態での操船装置4への操作を無効とする。
【選択図】図5
特許請求の範囲
【請求項1】
船舶を制御するためのシステムであって、前記船舶は、船舶推進器と、前記船舶の操船位置において前記船舶の操船者によって操作可能な操船装置とを含み、
前記操船者の位置を検出するセンサと、
コントローラと、
を備え、
前記コントローラは、
前記操船者が、前記操船位置を含む許可エリア内に居るかを判定し、
前記操船者が前記許可エリア内に居ない場合には、前記船舶推進器を停止させる、又は、前記船舶を減速させるように前記船舶推進器を制御し、
前記操船者が、前記許可エリア内の第1領域内に居るかを判定し、
前記操船者が前記第1領域内に居る場合には、前記操船装置への操作に応じて前記船舶推進器を制御し、
前記操船者が、前記許可エリア内において前記第1領域よりも前記操船位置から遠い第2領域内に居るかを判定し、
前記操船者が前記第2領域内に居る場合には、前記操船装置をフリーズ状態とし、
前記フリーズ状態での前記操船装置への操作を無効とする、
システム。
続きを表示(約 1,500 文字)
【請求項2】
前記コントローラは、前記操船装置をフリーズ状態とした後、前記操船装置が操作されても、前記フリーズ状態となる前の前記操船装置への操作に応じた前記船舶推進器の制御状態を維持する、
請求項1に記載のシステム。
【請求項3】
前記コントローラは、前記操船装置が前記フリーズ状態であるときに前記操船装置が操作された場合には、前記船舶推進器を停止させる、又は、前記船舶を減速させるように前記船舶推進器を制御する、
請求項1に記載のシステム。
【請求項4】
前記コントローラは、前記操船装置を前記フリーズ状態とした後、前記操船者が前記第1領域内に戻った場合には、前記操船装置を前記フリーズ状態から解除する、
請求項1に記載のシステム。
【請求項5】
前記操船装置は、中立位置から操作可能なスロットルレバーを含み、
前記コントローラは、前記操船装置が前記フリーズ状態で前記スロットルレバーが操作された後、前記操船者が前記第1領域内に居る状態で、前記スロットルレバーが中立位置に戻された場合に、前記操船装置を前記フリーズ状態から解除する、
請求項4に記載のシステム。
【請求項6】
前記船舶は、表示装置を含み、
前記コントローラは、前記操船装置が前記フリーズ状態である場合には、前記操船装置が前記フリーズ状態であることを示す表示を、前記表示装置によって出力する、
請求項1に記載のシステム。
【請求項7】
前記船舶は、解除装置を含み、
前記コントローラは、前記操船装置が前記フリーズ状態であるときに前記解除装置が操作された場合には、前記操船装置を前記フリーズ状態から解除する、
請求項1に記載のシステム。
【請求項8】
前記操船者によって装着される第1発信機をさらに備え、
前記センサは、前記操船位置において前記第1発信機からの無線信号を受信し、
前記コントローラは、
前記センサと前記第1発信機との通信に基づいて、前記第1発信機の位置を、前記操船者の位置として検出する、
請求項1に記載のシステム。
【請求項9】
他の操船者によって装着される第2発信機をさらに備え、
前記コントローラは、前記操船装置を前記フリーズ状態とした後、前記第2発信機が前記第1領域内に位置する場合には、前記操船装置を前記フリーズ状態から解除する、
請求項1に記載のシステム。
【請求項10】
船舶を制御するための方法であって、前記船舶は、船舶推進器と、前記船舶の操船位置において前記船舶の操船者によって操作可能な操船装置とを含み、
前記操船者の位置を検出することと、
前記操船者が、前記操船位置を含む許可エリア内に居るかを判定することと、
前記操船者が前記許可エリア内に居ない場合には、前記船舶推進器を停止させる、又は、前記船舶を減速させるように前記船舶推進器を制御することと、
前記操船者が、前記許可エリア内の第1領域内に居るかを判定することと、
前記操船者が前記第1領域内に居る場合には、前記操船装置への操作に応じて前記船舶推進器を制御することと、
前記操船者が、前記許可エリア内において前記第1領域よりも前記操船位置から遠い第2領域内に居るかを判定することと、
前記操船者が前記第2領域内に居る場合には、前記操船装置をフリーズ状態とすることと、
前記フリーズ状態での前記操船装置への操作を無効とすること、
を備える方法
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶を制御するためのシステムおよび方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
船舶の操船者は、緊急時に船舶を非常停止させるランヤードを装着する。ランヤードには、エンジンの点火回路に挿入される導電ピンが接続されている。操船者が船舶から落水すると、操船者の自重によって導電ピンが点火回路から抜かれることで、エンジンが停止する。
【0003】
一方、操船者が装着する発信機からの無線信号により、操船者の落水を検出するシステムが知られている。例えば、特許文献1の非常停止装置は、発信機からの電波信号の強度が規定値未満である場合に、操船者に異常が発生したかを判定する。非常停止装置は、操船者に異常が発生したと判定した場合には、船外機のエンジンを停止させる。
【先行技術文献】
【特許文献】
【0004】
特開2017-159679号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した非常停止装置では、発信機からの電波信号の強度が規定値未満になるまでは、操船者が操船席から離れても、船外機の操作が可能である。そのため、操船者が操船席から離れているときに、他の乗船者が、誤って船外機の操作レバーに触れてしまうことで、船外機を誤操作してしまう可能性がある。本発明の目的は、操船者が落水した場合には船舶を停止または減速させると共に、操船者が操船位置から離れたときに、船舶推進器が誤操作されることを抑えることにある。
【課題を解決するための手段】
【0006】
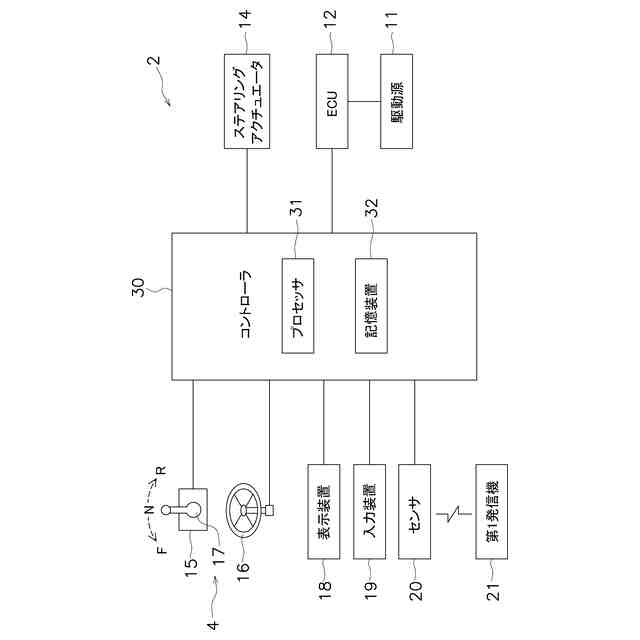
本発明の一態様に係るシステムは、船舶を制御するためのシステムである。船舶は、船舶推進器と操船装置とを含む。操船装置は、船舶の操船位置において、船舶の操船者によって操作可能である。本態様に係るシステムは、センサとコントローラとを備える。センサは、操船者の位置を検出する。コントローラは、操船者が、操船位置を含む許可エリア内に居るかを判定する。コントローラは、操船者が許可エリア内に居ない場合には、船舶推進器を停止させる、又は、船舶を減速させるように船舶推進器を制御する。コントローラは、操船者が、許可エリア内の第1領域内に居るかを判定する。コントローラは、操船者が第1領域内に居る場合には、操船装置への操作に応じて船舶推進器を制御する。コントローラは、操船者が、許可エリア内において第1領域よりも操船位置から遠い第2領域内に居るかを判定する。コントローラは、操船者が第2領域内に居る場合には、操船装置をフリーズ状態とする。コントローラは、フリーズ状態での操船装置への操作を無効とする。
【0007】
本発明の一態様に係る方法は、船舶を制御するための方法である。船舶は、船舶推進器と操船装置とを含む。操船装置は、船舶の操船位置において、船舶の操船者によって操作可能である。本態様に係る方法は、操船者の位置を検出することと、操船者が、操船位置を含む許可エリア内に居るかを判定することと、操船者が許可エリア内に居ない場合には、船舶推進器を停止させる、又は、船舶を減速させるように船舶推進器を制御することと、操船者が、許可エリア内の第1領域内に居るかを判定することと、操船者が第1領域内に居る場合には、操船装置への操作に応じて船舶推進器を制御することと、操船者が、許可エリア内において第1領域よりも操船位置から遠い第2領域内に居るかを判定することと、操船者が第2領域内に居る場合には、操船装置をフリーズ状態とすることと、フリーズ状態での操船装置への操作を無効とすること、を備える。
【発明の効果】
【0008】
本発明によれば、操船者が、操船位置を含む許可エリア内に居ない場合には、船舶推進器が停止する、又は、船舶を減速させるように船舶推進器が制御される。それにより、操船者が落水した場合には、船舶を停止または減速させることができる。また、操船者が、許可エリア内において第1領域よりも操船位置から遠い第2領域内に居る場合には、操船装置がフリーズ状態となって、操船装置への操作が無効とされる。そのため、操船者が操船位置から離れたときに、船舶推進器が誤操作されることが抑えられる。
【図面の簡単な説明】
【0009】
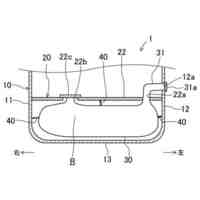
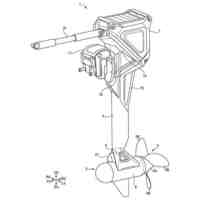
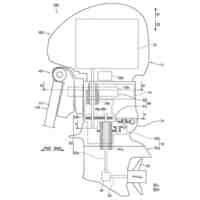
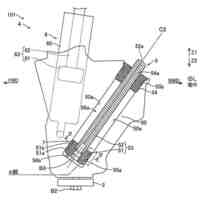
実施形態にかかる船舶の側面図である。
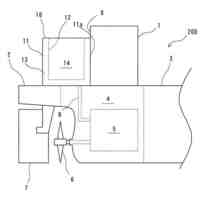
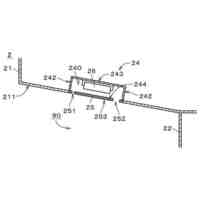
実施形態にかかる船舶を制御するシステムの構成を示すブロック図である。
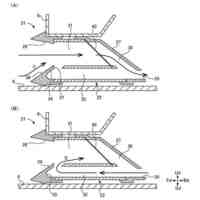
第1実施形態にかかる船舶推進器の誤操作を防止するための制御の処理を示すフローチャートである。
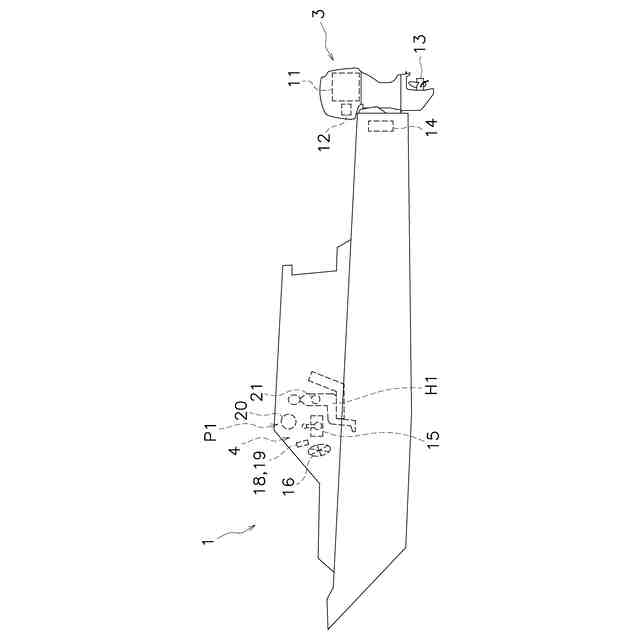
許可エリア、第1領域、第2領域を示す船舶の側面図である。
許可エリア、第1領域、第2領域を示す船舶の側面図である。
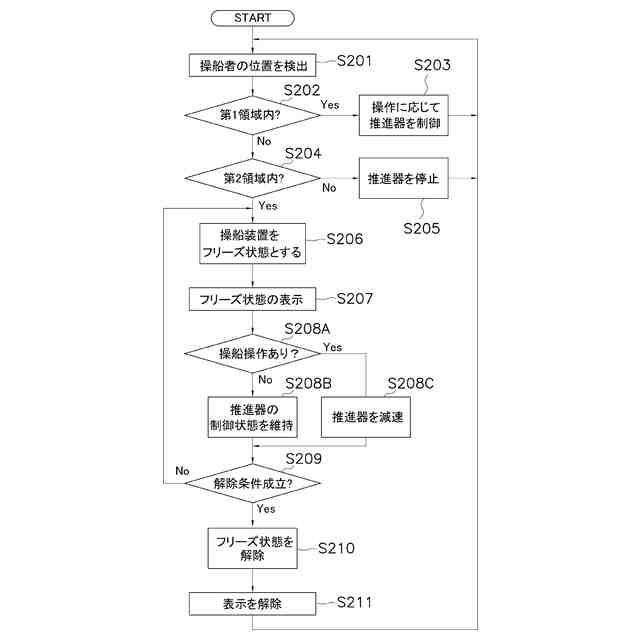
第2実施形態にかかる船舶推進器3の誤操作を防止するための制御の処理を示すフローチャートである。
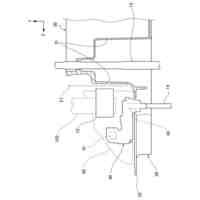
第1変形例にかかる船舶を制御するシステムの構成を示すブロック図である。
第2変形例にかかる船舶を制御するシステムの構成を示す船舶の側面図である。
【発明を実施するための形態】
【0010】
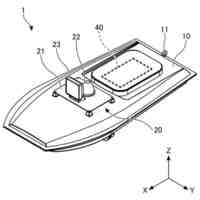
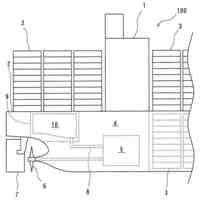
以下、図面を参照して実施形態にかかる船舶を制御するためのシステムについて説明する。図1は、実施形態にかかる船舶1の側面図である。図2は、実施形態にかかる船舶1を制御するためのシステム2の構成を示すブロック図である。図1に示すように、船舶1は、船舶推進器3と操船装置4とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
川下り用船
4か月前
個人
発電船
5か月前
個人
シーアンカー
7か月前
個人
補助機構
28日前
個人
船用横揺防止具
2か月前
個人
コンパクトシティ船
27日前
個人
渦流動力推進構造
22日前
小柳建設株式会社
台船
7か月前
炎重工株式会社
浮標
3か月前
炎重工株式会社
浮標
3か月前
炎重工株式会社
移動体
6か月前
個人
船舶
3か月前
個人
スクリュープロペラ
17日前
株式会社フルトン
水中捕捉装置
29日前
オーケー工業株式会社
係留フック
1か月前
個人
回転式による流体流出防止タンカー
28日前
株式会社テラサン
位置保持システム
6か月前
スズキ株式会社
船外機
15日前
スズキ株式会社
船外機
15日前
常石造船株式会社
メタノール燃料船
3か月前
ヤマハ発動機株式会社
船外機
3か月前
株式会社ユピテル
システム及びプログラム等
1日前
株式会社神戸タフ興産
船舶の甲板構造
4か月前
炎重工株式会社
自律航行浮遊体
3か月前
藤倉コンポジット株式会社
架台
3か月前
株式会社大林組
浮体式構造物の設置方法
1か月前
ヤマハ発動機株式会社
船外機および船舶
2か月前
株式会社大林組
水中潜行システム
2か月前
スズキ株式会社
電動船外機
15日前
ヤマハ発動機株式会社
船外機および船舶
2か月前
ASTI株式会社
操作機構取付構造
5か月前
カナデビア株式会社
浮体構造物
22日前
株式会社新来島どっく
船舶の居住区支持構造
2か月前
スズキ株式会社
微小塵捕捉装置
15日前
日立造船株式会社
係留システム
7か月前
常石造船株式会社
メタノール燃料コンテナ船
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ