TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025030985
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023136901
出願日
2023-08-25
発明の名称
走行システム、走行方法、及び走行プログラム
出願人
シャープ株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250228BHJP(制御;調整)
要約
【課題】複数の自動走行装置全体の走行効率を向上させることが可能な走行システム、走行方法、及び走行プログラムを提供する。
【解決手段】走行システム10は、第1自動走行装置2の現在位置から目的位置までの第1走行経路の一部を構成する第1区間走行経路の長さを、前記第1走行経路に含まれる複数の第1タグのうち第2自動走行装置2に設定された第2区間走行経路に含まれる複数の第2タグに重複する重複タグの位置に基づいて決定し、決定される長さの前記第1区間走行経路を、第1自動走行装置2が次に走行すべき走行経路に設定する生成処理部113を備える。
【選択図】図1
特許請求の範囲
【請求項1】
複数の自動走行装置のそれぞれを、床面に配置された複数のタグを検出する検出結果に基づいて走行させる走行システムであって、
第1自動走行装置の現在位置から目的位置までの第1走行経路の一部を構成する第1区間走行経路の長さを、前記第1走行経路に含まれる複数の第1タグのうち第2自動走行装置に設定された第2区間走行経路に含まれる複数の第2タグに重複する重複タグの位置に基づいて決定する決定処理部と、
前記決定処理部により決定される長さの前記第1区間走行経路を、前記第1自動走行装置が次に走行すべき走行経路に設定する生成処理部と、
を備える走行システム。
続きを表示(約 1,300 文字)
【請求項2】
前記決定処理部は、前記第1自動走行装置の現在位置に対応する前記第1タグから、前記重複タグの直前の前記第1タグまでの間に位置する、前記第2タグに重複しない非重複タグの合計数に基づいて、前記第1区間走行経路の長さを決定する、
請求項1に記載の走行システム。
【請求項3】
前記生成処理部は、前記第1区間走行経路が前記第2自動走行装置に設定された第2区間走行経路と重複しないように、前記第1区間走行経路を生成する、
請求項1に記載の走行システム。
【請求項4】
前記決定処理部は、前記複数の自動走行装置のそれぞれについて、区間走行経路の長さを決定する処理を順に実行する、
請求項1に記載の走行システム。
【請求項5】
前記決定処理部は、前記複数の自動走行装置のそれぞれについて、前記区間走行経路の長さを決定する処理を優先度に応じた順に実行する、
請求項4に記載の走行システム。
【請求項6】
前記決定処理部は、前記自動走行装置の外形サイズが大きい順に、前記区間走行経路の長さを決定する処理を実行する、
請求項5に記載の走行システム。
【請求項7】
前記決定処理部は、前記複数の自動走行装置のそれぞれに対して走行指示が出力された順に、前記区間走行経路の長さを決定する処理を実行する、
請求項5に記載の走行システム。
【請求項8】
前記第1自動走行装置に対して設定した前記第1区間走行経路を、他の前記自動走行装置の進入を禁止する進入禁止エリアに設定する設定処理部をさらに備える、
請求項1~7のいずれかに記載の走行システム。
【請求項9】
複数の自動走行装置のそれぞれを、床面に配置された複数のタグを検出する検出結果に基づいて走行させる走行方法であって、
第1自動走行装置の現在位置から目的位置までの第1走行経路の一部を構成する第1区間走行経路の長さを、前記第1走行経路に含まれる複数の第1タグのうち第2自動走行装置に設定された第2区間走行経路に含まれる複数の第2タグに重複する重複タグの位置に基づいて決定することと、
決定される長さの前記第1区間走行経路を、前記第1自動走行装置が次に走行すべき走行経路に設定することと、
を一又は複数のプロセッサーが実行する走行方法。
【請求項10】
複数の自動走行装置のそれぞれを、床面に配置された複数のタグを検出する検出結果に基づいて走行させる走行プログラムであって、
第1自動走行装置の現在位置から目的位置までの第1走行経路の一部を構成する第1区間走行経路の長さを、前記第1走行経路に含まれる複数の第1タグのうち第2自動走行装置に設定された第2区間走行経路に含まれる複数の第2タグに重複する重複タグの位置に基づいて決定することと、
決定される長さの前記第1区間走行経路を、前記第1自動走行装置が次に走行すべき走行経路に設定することと、
を一又は複数のプロセッサーに実行させるための走行プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自動走行装置を走行させる走行システム、走行方法、及び走行プログラムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来、自動走行装置(AGV、走行車両など)を、床面に配置された複数のタグを検出した検出結果に基づいて走行させる走行システムが知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2002-341939号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の走行システムは、スタート地点から目的地までの走行経路を予め設定し、設定された走行経路に従って自動走行装置を走行させたり、障害物を検知した場合に自動走行装置に障害物を回避する回避経路を走行させたりするものである。ここで、同一エリアを複数の自動走行装置が走行する場合、自動走行装置同士が干渉しないように各自動走行装置のスタート地点から目的地までの走行経路を予め設定する。また、例えば第1自動走行装置の走行経路を設定すると、当該走行経路を他の自動走行装置の進入を禁止する進入禁止エリアに設定する。上記従来の方法では、例えば第1自動走行装置に対応するスタート地点から目的地までの走行経路の全体が進入禁止エリアに設定されると、他の自動走行装置の走行可能エリアが狭くなり、複数の自動走行装置全体の走行効率が低下する問題が生じる。
【0005】
本開示の目的は、複数の自動走行装置全体の走行効率を向上させることが可能な走行システム、走行方法、及び走行プログラムを提供することにある。
【課題を解決するための手段】
【0006】
本開示の一の態様に係る走行システムは、複数の自動走行装置のそれぞれを、床面に配置された複数のタグを検出する検出結果に基づいて走行させるシステムである。前記走行システムは、決定処理部と生成処理部とを備える。前記決定処理部は、第1自動走行装置の現在位置から目的位置までの第1走行経路の一部を構成する第1区間走行経路の長さを、前記第1走行経路に含まれる複数の第1タグのうち第2自動走行装置に設定された第2区間走行経路に含まれる複数の第2タグに重複する重複タグの位置に基づいて決定する。前記生成処理部は、前記決定処理部により決定される長さの前記第1区間走行経路を、前記第1自動走行装置が次に走行すべき走行経路に設定する。
【0007】
本開示の他の態様に係る走行方法は、複数の自動走行装置のそれぞれを、床面に配置された複数のタグを検出する検出結果に基づいて走行させる方法である。前記走行方法では、第1自動走行装置の現在位置から目的位置までの第1走行経路の一部を構成する第1区間走行経路の長さを、前記第1走行経路に含まれる複数の第1タグのうち第2自動走行装置に設定された第2区間走行経路に含まれる複数の第2タグに重複する重複タグの位置に基づいて決定することと、決定される長さの前記第1区間走行経路を、前記第1自動走行装置が次に走行すべき走行経路に設定することと、を一又は複数のプロセッサーが実行する。
【0008】
本開示の他の態様に係る走行プログラムは、複数の自動走行装置のそれぞれを、床面に配置された複数のタグを検出する検出結果に基づいて走行させるプログラムである。前記走行プログラムは、第1自動走行装置の現在位置から目的位置までの第1走行経路の一部を構成する第1区間走行経路の長さを、前記第1走行経路に含まれる複数の第1タグのうち第2自動走行装置に設定された第2区間走行経路に含まれる複数の第2タグに重複する重複タグの位置に基づいて決定することと、決定される長さの前記第1区間走行経路を、前記第1自動走行装置が次に走行すべき走行経路に設定することと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【発明の効果】
【0009】
本開示によれば、複数の自動走行装置全体の走行効率を向上させることが可能な走行システム、走行方法、及び走行プログラムを提供することができる。
【図面の簡単な説明】
【0010】
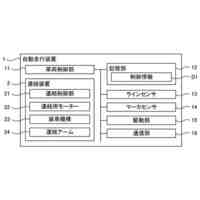
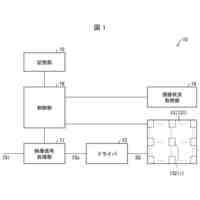
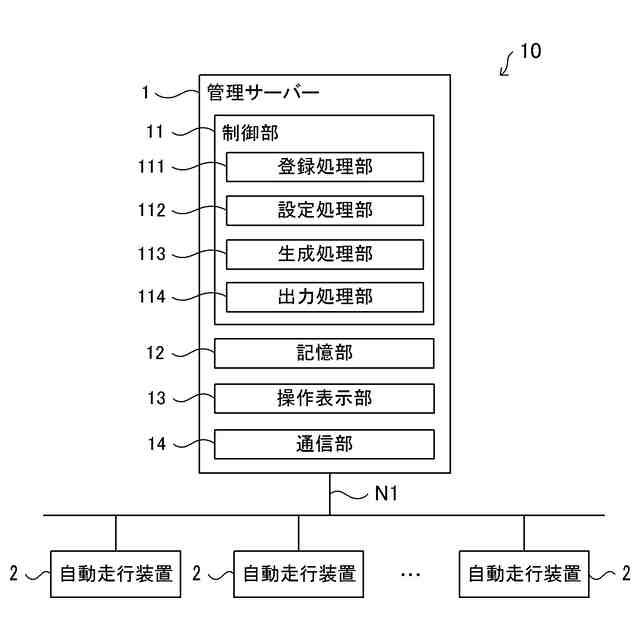
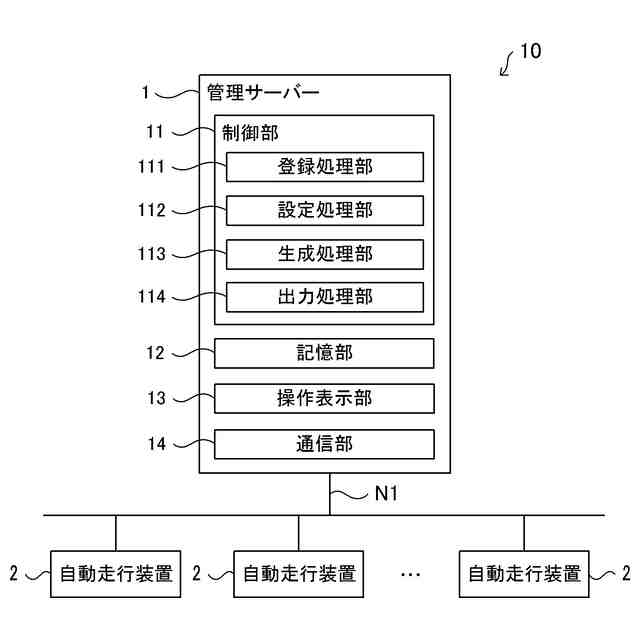
図1は、本開示の第1実施形態に係る走行システムの構成を示すブロック図である。
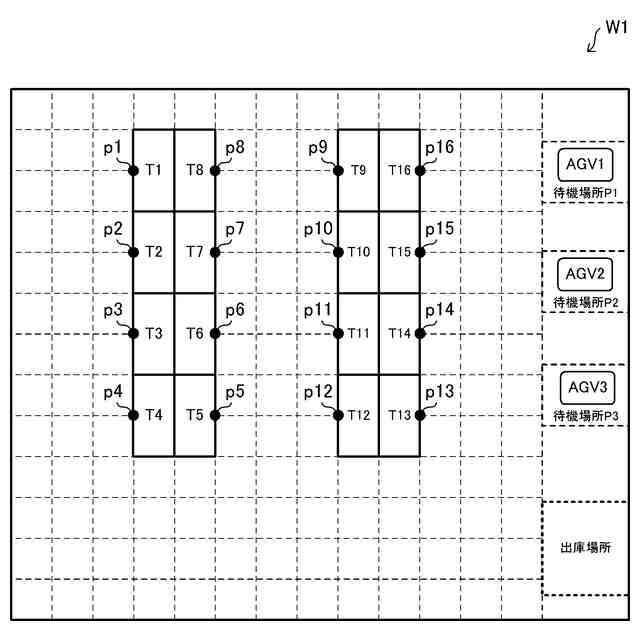
図2は、本開示の第1実施形態に係る走行システムが適用される施設の構成を模式的に示す図である。
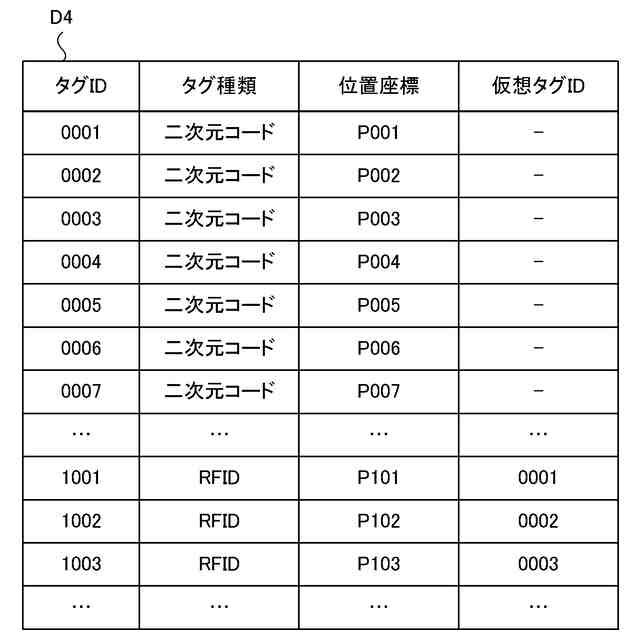
図3は、本開示の第1実施形態に係る走行システムが適用される施設に配置されるタグの配置例に示す図である。
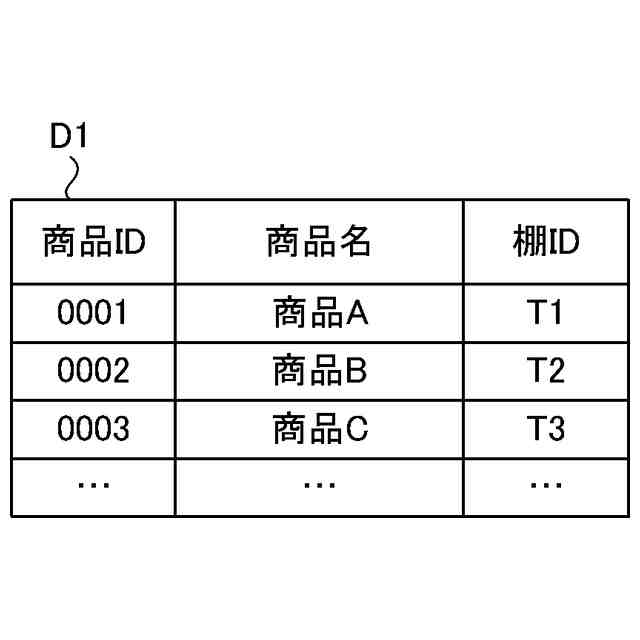
図4は、本開示の第1実施形態に係る走行システムで利用される商品情報の一例を示す図である。
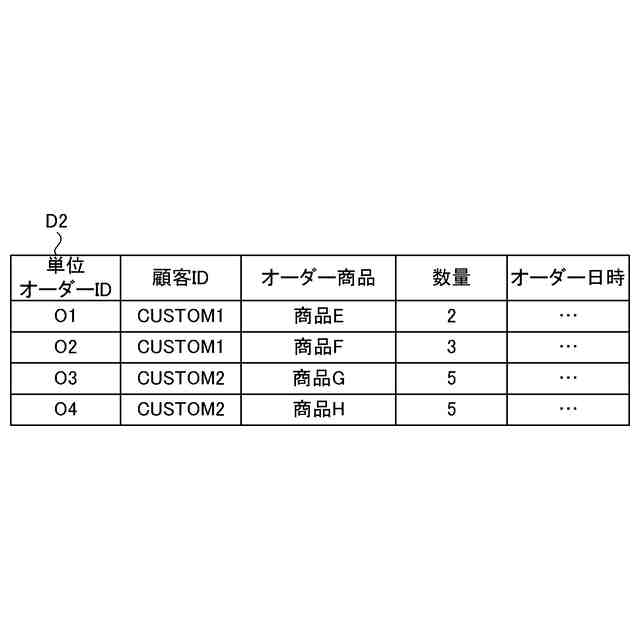
図5は、本開示の第1実施形態に係る走行システムで利用されるオーダー情報の一例を示す図である。
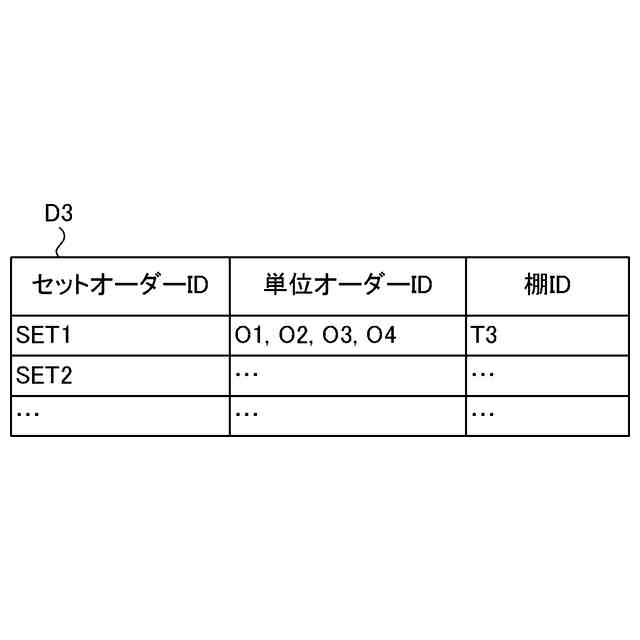
図6は、本開示の第1実施形態に係る走行システムで利用される搬送情報の一例を示す図である。
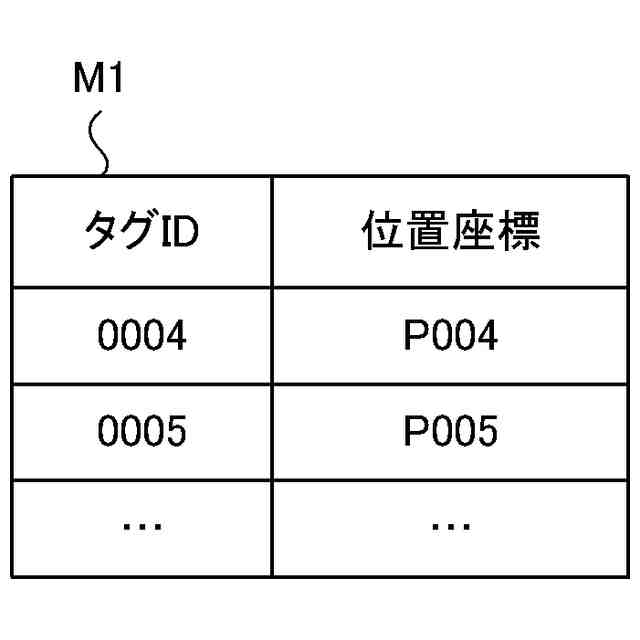
図7は、本開示の第1実施形態に係る走行システムで利用されるマップデータの一例を示す図である。
図8は、本開示の第1実施形態に係る自動走行装置の走行例を示す図である。
図9は、本開示の第1実施形態に係るAGV1に対応するマップデータの一例を示す図である。
図10は、本開示の第1実施形態に係るAGV2に対応するマップデータの一例を示す図である。
図11は、本開示の第1実施形態に係るAGV3に対応するマップデータの一例を示す図である。
図12は、本開示の第1実施形態に係る走行システムで実行される走行処理の手順の一例を示すフローチャートである。
図13は、本開示の第2実施形態に係る自動走行装置の区間走行経路の一例を示す図である。
図14は、本開示の第2実施形態に係る禁止点(走行禁止タグ)の設定方法の一例を示す図である。
図15は、本開示の第2実施形態に係るAGV1に対応するマップデータの一例を示す図である。
図16は、本開示の第2実施形態に係るAGV2に対応するマップデータの一例を示す図である。
図17は、本開示の第2実施形態に係るAGV3に対応するマップデータの一例を示す図である。
図18は、本開示の第2実施形態に係る走行システムで実行される走行処理の手順の一例を示すフローチャートである。
図19は、本開示の第3実施形態に係る自動走行装置の区間走行経路の長さを決定する方法を説明するための図である。
図20は、本開示の第3実施形態に係る自動走行装置の区間走行経路の長さを決定する方法を説明するための図である。
図21は、本開示の第4実施形態に係る走行システムで利用されるマップデータの一例を示す図である。
図22は、本開示の第4実施形態に係る走行システムで実行される走行処理の手順の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
シャープ株式会社
冷却庫
23日前
シャープ株式会社
冷却庫
12日前
シャープ株式会社
ケース
12日前
シャープ株式会社
冷却庫
12日前
シャープ株式会社
洗濯機
8日前
シャープ株式会社
冷蔵庫
16日前
シャープ株式会社
冷却庫
1日前
シャープ株式会社
面構造体
16日前
シャープ株式会社
送風装置
16日前
シャープ株式会社
送風装置
16日前
シャープ株式会社
送風装置
18日前
シャープ株式会社
照明装置
10日前
シャープ株式会社
空気調和機
23日前
シャープ株式会社
加熱調理器
23日前
シャープ株式会社
画像形成装置
10日前
シャープ株式会社
画像読取装置
8日前
シャープ株式会社
洗濯キャップ
8日前
シャープ株式会社
画像形成装置
1日前
シャープ株式会社
IMS分析装置
12日前
シャープ株式会社
送風装置及び団扇
16日前
シャープ株式会社
蒸発器及び冷蔵庫
2日前
シャープ株式会社
ケース及び冷却庫
12日前
シャープ株式会社
冷蔵庫の扉および冷蔵庫
8日前
シャープ株式会社
通信装置および通信方法
1日前
シャープ株式会社
連結装置及び自動走行装置
8日前
シャープ株式会社
給紙装置、及び、画像形成装置
17日前
シャープ株式会社
電子写真感光体及び画像形成装置
18日前
シャープ株式会社
表示処理装置および表示処理方法
8日前
シャープ株式会社
表示装置及び周辺機器信号切替方法
16日前
シャープ株式会社
システム、サーバー及び情報出力方法
1日前
シャープ株式会社
表示装置、及び、表示装置の制御方法
8日前
シャープ株式会社
表示装置、及び、表示装置の制御方法
8日前
シャープ株式会社
UE(User Equipment)
9日前
シャープ株式会社
UE(User Equipment)
9日前
シャープ株式会社
空調システムおよび空気調和機の制御方法
1日前
シャープ株式会社
画像処理装置及び画像処理装置の制御方法
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ