TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025030360
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023135582
出願日
2023-08-23
発明の名称
運転支援装置および運転支援プログラム
出願人
株式会社SOKEN
,
株式会社デンソー
,
トヨタ自動車株式会社
代理人
弁理士法人ゆうあい特許事務所
主分類
G06T
7/00 20170101AFI20250228BHJP(計算;計数)
要約
【課題】車線変更判定の正確性を向上させる技術を提供すること。
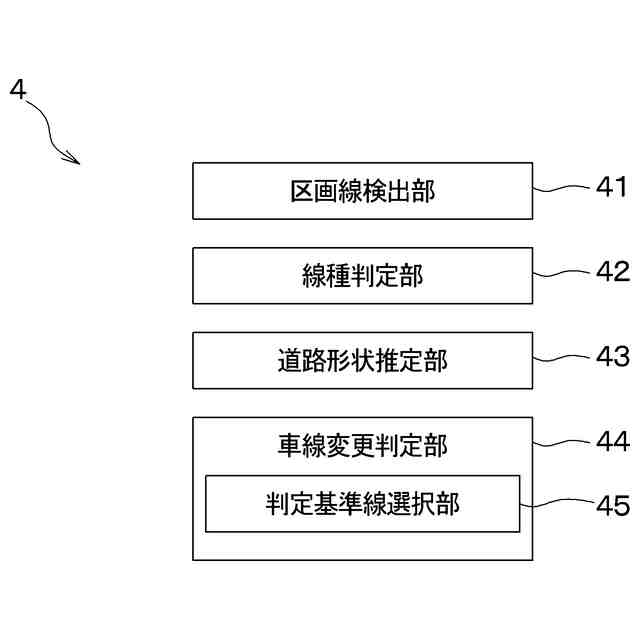
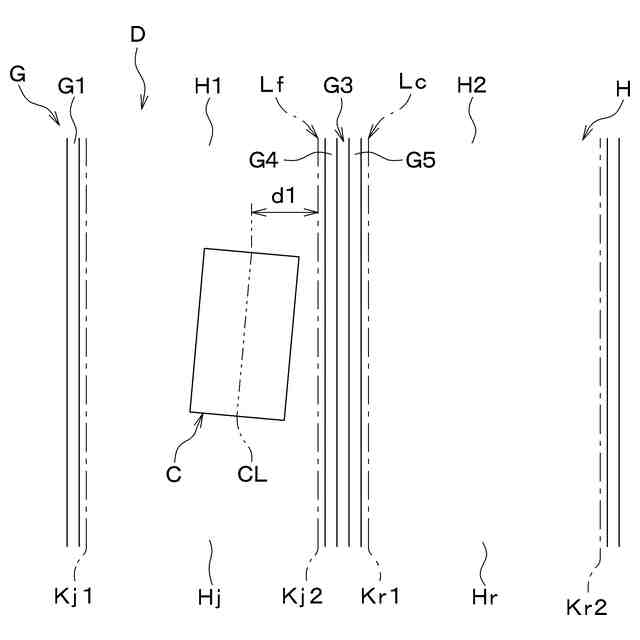
【解決手段】車両(C)の運転を支援する運転支援装置(1)は、車線変更判定部(44)を備える。車線変更判定部は、車両の前方の道路(D)の路面(DF)上に設けられた道路区画線(G)の撮影画像に基づく認識結果に基づいて、車両が現在走行中の車線である自車線(Hj)から隣接車線(Hr)への車線変更が行われたことを判定する。車線変更判定部は、車線変更判定の基準となる判定基準線(Lc)を選択する判定基準線選択部(45)を備える。判定基準線選択部は、画像認識結果に含まれる、車線(H)の境界候補となる線情報である仮想線のうち、自車線から所定量オフセットした仮想線を選択する。
【選択図】図4
特許請求の範囲
【請求項1】
車両(C)の運転を支援する、運転支援装置(1)であって、
前記車両の前方の道路(D)の路面(DF)上に設けられた道路区画線(G)の撮影画像に基づく認識結果に基づいて、前記車両が現在走行中の車線である自車線(Hj)から隣接車線(Hr)への車線変更が行われたことを判定する、車線変更判定部(44)を備え、
前記車線変更判定部は、車線変更判定の基準となる判定基準線(Lc)を選択する、判定基準線選択部(45)を備え、
前記判定基準線選択部は、前記認識結果に含まれる、車線(H)の境界候補となる線情報である仮想線のうち、前記自車線から所定量オフセットした前記仮想線を選択する、
運転支援装置。
続きを表示(約 1,200 文字)
【請求項2】
前記判定基準線選択部は、前記自車線と前記隣接車線との位置差分に基づいて生成される前記仮想線を選択する、
請求項1に記載の運転支援装置。
【請求項3】
前記判定基準線選択部は、前記位置差分を地図情報から取得する、
請求項2に記載の運転支援装置。
【請求項4】
前記判定基準線選択部は、前記位置差分が所定値よりも大きい場合、前記自車線と前記隣接車線と中間に生成される前記仮想線を選択する、
請求項2に記載の運転支援装置。
【請求項5】
前記判定基準線選択部は、前記自車線を構成する前記道路区画線と前記隣接車線を構成する前記道路区画線との間に、他の前記道路区画線が存在する場合、かかる他の前記道路区画線に対応する前記仮想線を選択する、
請求項1に記載の運転支援装置。
【請求項6】
前記判定基準線選択部は、前記自車線と前記隣接車線とが交差する場合、前記自車線における前記隣接車線側の境界位置に対応する前記仮想線である第一仮想線(Kj1)と、前記隣接車線における前記自車線側の境界位置に対応する前記仮想線である第二仮想線(Kr2)とのうちの、前記自車線からの横位置が遠方にある方を、前記判定基準線として選択する、
請求項1に記載の運転支援装置。
【請求項7】
前記判定基準線選択部は、前記隣接車線が前記自車線と交差する分岐路である場合、地図情報から取得した前記自車線と前記隣接車線との境界から生成される前記仮想線を選択する、
請求項1に記載の運転支援装置。
【請求項8】
前記撮影画像に基づいて前記自車線を認識するとともに、路肩(H6)への緊急退避時に当該路肩を前記自車線からの車線変更先としての前記隣接車線として認識する、車線認識部(60)をさらに備え、
前記車線認識部は、前記路肩の境界位置に対応する前記仮想線を生成する仮想線生成部(62)を備え、
前記仮想線生成部は、前記自車線の認識結果に基づいて、前記仮想線を生成する、
請求項1に記載の運転支援装置。
【請求項9】
前記仮想線生成部は、前記自車線における前記路肩側の境界位置に対応する自車線仮想線(Kj1)から前記道路区画線の幅に対応する所定幅離れた位置に前記仮想線を設定し、
前記車線認識部は、前記仮想線の付近に前記道路区画線が検出されない場合、当該仮想線を、前記路肩の境界位置に対応するものとして確定する、
請求項8に記載の運転支援装置。
【請求項10】
前記車線認識部は、前記自車線の認識が不安定または未認識である場合、前記仮想線を生成しない、
請求項8に記載の運転支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の運転を支援する、運転支援装置および運転支援プログラムに関するものである。
続きを表示(約 5,000 文字)
【背景技術】
【0002】
近年、車線維持制御機能や、車線逸脱抑制機能や、車線変更支援機能等を実現可能な運転支援装置あるいは自動運転装置を搭載した車両の普及が図られている。車線維持制御機能は、一定の車線内で走行させるように車両の運動制御を自動的に行う機能である。車線逸脱抑制機能は、車両が現在走行中の車線から逸脱しないように、ドライバに対する警告および/または自動的な操舵制御を行う機能である。車線変更支援機能は、現在走行中の車線から隣接車線へと車両を自動的に移動させる制御である。これらの運転支援機能あるいは自動運転機能を適正に実行するためには、自車両が現在走行中の車線を正確に認識することが求められる。
【0003】
この点、特許文献1は、地図情報から得られる道路区画線のパターンと、カメラによって撮像された画像から認識される自車両の周辺の道路区画線のパターンとを比較することで、自車両が走行している車線を認識する技術を開示する。
【先行技術文献】
【特許文献】
【0004】
特開2018-203018号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
この種の装置において、車線変更や追い越し等のために、自車両が現在走行中の車線である自車線から意図的に逸脱する際には、自車両が自車線から逸脱して隣接車線等に移動したか否かの判定が行われる。このとき、従来のこの種の装置においては、走行シーンによっては、かかる判定の正確性が低下する場合があり得る。本発明は、上記に例示した事情等に鑑みてなされたものである。すなわち、本発明は、例えば、車線変更判定の正確性を向上させる技術を提供するものである。
【課題を解決するための手段】
【0006】
請求項1に記載の、車両(C)の運転を支援する運転支援装置(1)は、
前記車両の前方の道路(D)の路面(DF)上に設けられた道路区画線(G)の撮影画像に基づく認識結果に基づいて、前記車両が現在走行中の車線である自車線(Hj)から隣接車線(Hr)への車線変更が行われたことを判定する、車線変更判定部(44)を備え、
前記車線変更判定部は、車線変更判定の基準となる判定基準線(Lc)を選択する、判定基準線選択部(45)を備え、
前記判定基準線選択部は、前記認識結果に含まれる、車線(H)の境界候補となる線情報である仮想線のうち、前記自車線から所定量オフセットした前記仮想線を選択する。
請求項15に記載の運転支援プログラムは、車両(C)の運転を支援する運転支援装置(1)により実行されるコンピュータプログラムであって、
前記運転支援装置が実行する処理は、
前記車両の前方の道路(D)の路面(DF)上に設けられた道路区画線(G)の撮影画像に基づく認識結果に基づいて、前記車両が現在走行中の車線である自車線(Hj)から隣接車線(Hr)への車線変更が行われたことを判定する、車線変更判定処理を含み、
前記車線変更判定処理は、車線変更判定の基準となる判定基準線(Lc)を選択する、判定基準線選択処理を含み、
前記判定基準線選択処理は、前記認識結果に含まれる、車線(H)の境界候補となる線情報である仮想線のうち、前記自車線から所定量オフセットした前記仮想線を選択する。
【0007】
なお、出願書類の各欄において、各要素に括弧付きの参照符号が付される場合がある。しかしながら、かかる参照符号は、同要素と後述する実施形態に記載の具体的手段との対応関係の一例を、単に示すものにすぎない。よって、本発明は、上記の参照符号の記載によって、何ら限定されるものではない。
【図面の簡単な説明】
【0008】
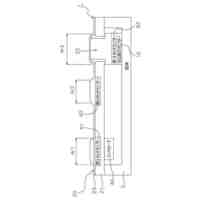
本発明の一実施形態に係る運転支援装置を搭載した自車両が道路を走行中の様子を示す側面図である。
図1に示された自車両の平面図である。
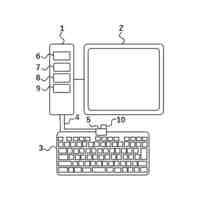
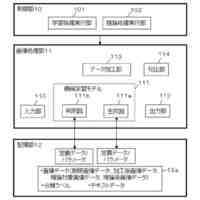
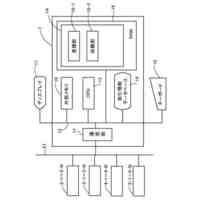
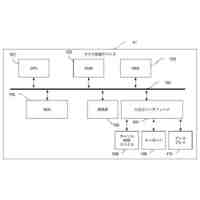
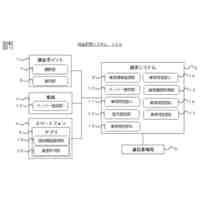
図1に示された運転支援装置の第一実施形態における概略的な構成を示すブロック図である。
図3に示された画像認識部にて実現される概略的な機能構成を示すブロック図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
比較例において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
比較例において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
比較例において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
比較例において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
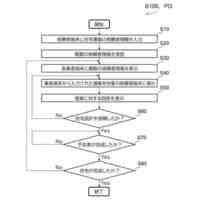
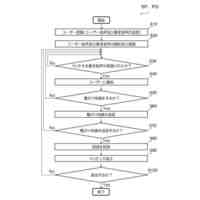
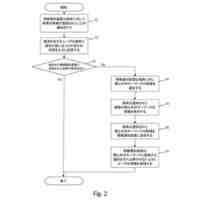
本発明の第一実施形態における車線変更判定処理の具体例を示すフローチャートである。
本発明の第一実施形態における車線変更判定処理の具体例を示すフローチャートである。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が左側車線から右側車線に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が直進車線から分岐車線側に車線変更する際の車線認識の概要を示す概略図である。
本発明の第一実施形態において自車両が直進車線から分岐車線側に車線変更する際の車線認識の概要を示す概略図である。
図1に示された運転支援装置の第二実施形態および第三実施形態における概略的な構成を示すブロック図である。
図25に示された画像認識部および車線認識部にて実現される概略的な機能構成の一例を示すブロック図である。
図26に示された車線認識部により奏される路肩認識の概要を示す概略図である。
図26に示された車線認識部により奏される路肩認識機能に関する処理の具体例を示すフローチャートである。
図25に示された画像認識部および車線認識部にて実現される概略的な機能構成の他の一例を示すブロック図である。
図29に示された車線認識部により奏される路肩認識機能に関する処理の具体例を示すフローチャートである。
図25に示された画像認識部および車線認識部にて実現される概略的な機能構成のさらに他の一例を示すブロック図である。
図31に示された車線認識部により奏される路肩認識機能に関する処理の具体例を示すフローチャートである。
図25に示された画像認識部および車線認識部にて実現される概略的な機能構成のさらに他の一例を示すブロック図である。
図33に示された車線認識部により奏される路肩認識機能に関する処理の具体例を示すフローチャートである。
図25に示された画像認識部および車線認識部にて実現される概略的な機能構成のさらに他の一例を示すブロック図である。
図35に示された車線認識部により奏される路肩認識機能に関する処理の具体例を示すフローチャートである。
図25に示された画像認識部および車線認識部にて実現される概略的な機能構成のさらに他の一例を示すブロック図である。
図37に示された車線認識部により奏される路肩認識機能に関する処理の一具体例を示すフローチャートである。
図37に示された車線認識部により奏される路肩認識の概要を示す概略図である。
図37に示された車線認識部により奏される路肩認識の概要を示す概略図である。
図37に示された車線認識部により奏される路肩認識の概要を示す概略図である。
図37に示された車線認識部により奏される路肩認識機能に関する処理の他の一具体例を示すフローチャートである。
【発明を実施するための形態】
【0009】
(実施形態)
以下、本発明の実施形態を、図面に基づいて説明する。なお、実施形態に対しては、適宜、構成や機能や実装例についての変更が可能である。よって、明細書中において、複数の実施形態や変形例を記載することがある。この場合、以下の説明において、或る1つの実施形態と他の実施形態との間、或る1つの実施形態とその変形例との間、あるいは、或る1つの変形例と他の変形例との間で、相互に同一または均等である部分については、同一の参照符号を付与するものとする。そして、かかる部分に関する、先行する説明は、技術的矛盾または特段の追加説明なき限り、後行する他の実施形態あるいは変形例に適宜援用され得るものとする。
【0010】
(運転支援装置)
図1および図2を参照すると、自車両Cは、道路Dを走行する自動車であって、箱状の車体を備えている。自車両Cには、運転支援装置1が搭載されている。運転支援装置1は、カメラである画像撮影部2による撮影画像に基づく画像認識結果を用いて、自車両Cの運転を支援するように構成されている。具体的には、運転支援装置1は、自車両Cの運転制御動作や乗員に対する警告動作等の各種動作を実行可能な構成を有している。なお、運転支援装置1が自車両Cの自動運転を実現可能に構成されている場合、かかる運転支援装置1は「自動運転装置」と称される。「自動運転」は、SAEレベル3~5に該当する、運転自動化システムが全ての動的運転タスクを担当すなわち実行する運転自動化レベルである。これに対し、「運転支援」は、SAEレベル1~2に該当する、運転自動化システムが一部の動的運転タスクを担当すなわち実行する運転自動化レベルである。すなわち、「運転支援」は、SAEレベル2の「高度運転支援」をも含む。「動的運転タスク」とは、道路交通において車両を操作する際にリアルタイムで行う必要がある全ての操作上および戦術上の機能であって、戦略上の機能を除いたものである。運転行動全般は、戦略上、戦術上、および操作上の3種類の機能に分類できる。「戦略上」の機能は、行程計画、経由地選択、等であって、具体的には、「行くか行かないか、いつどこへどのように行くか」を決定あるいは選択することを含む。「戦術上」の機能は、追い越しや車線変更をするかどうかやいつするかの決定、適正速度の選定等、交通局面での車両操作が関連する。「操作上」の機能は、操舵、制動、加速、等を含む。SAEはSociety Of Automotive Engineersの略である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
プログラム
3日前
個人
情報提示方法
1か月前
株式会社理研
演算装置
10日前
個人
アカウントマップ
1か月前
個人
プログラム
1か月前
個人
プログラム
1か月前
個人
自動精算システム
1か月前
個人
日本語入力支援システム
10日前
個人
AI旅行最適化プラグイン
9日前
個人
発想支援方法及びシステム
1か月前
個人
市場受発注システム
1か月前
個人
学習装置及び推論装置
1か月前
個人
納骨堂システム
2日前
個人
分類処理プログラム及び方法
1か月前
個人
案件管理装置および端末装置
24日前
株式会社発明屋
電池指向の構造設計
1か月前
富士通株式会社
金融システム
1か月前
井関農機株式会社
ロボット作業車両
1か月前
トヨタ自動車株式会社
管理装置
1か月前
キヤノン株式会社
情報処理装置
10日前
株式会社イズミ
総合代行システム
20日前
トヨタ自動車株式会社
電気自動車
16日前
個人
ダブルオークションシステム
20日前
富士通株式会社
プロセッサ
1か月前
株式会社プレニーズ
仲介システム
1か月前
村田機械株式会社
人員配置システム
1か月前
富士通株式会社
予測
23日前
トヨタ自動車株式会社
情報通知方法
1か月前
ブラザー工業株式会社
無線通信装置
1か月前
トヨタ自動車株式会社
作業管理装置
1か月前
個人
販売支援システム
1か月前
株式会社SUBARU
車両用操作装置
16日前
株式会社TIMEWELL
情報処理システム
3日前
トヨタ自動車株式会社
生成装置
1か月前
NISSHA株式会社
入力装置
1か月前
合同会社IPマネジメント
料金収受システム
23日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ