TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025005874
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023106284
出願日
2023-06-28
発明の名称
作業管理装置
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G06Q
50/04 20120101AFI20250109BHJP(計算;計数)
要約
【課題】 作業効率を向上することができる作業管理装置を提供する。
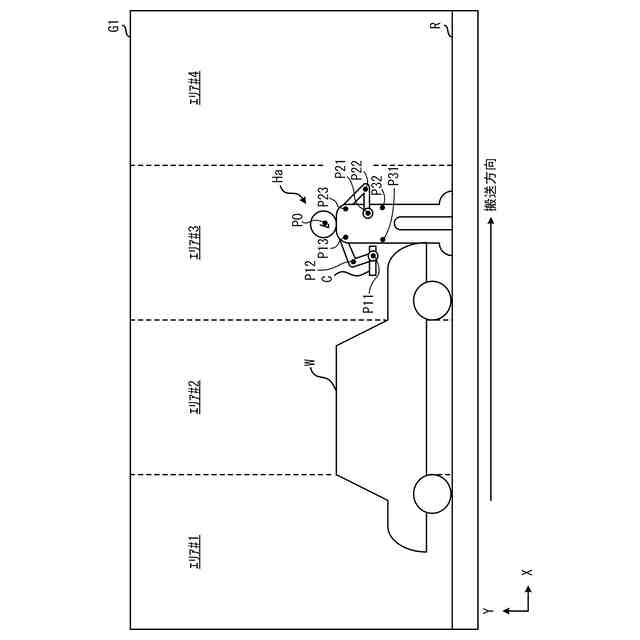
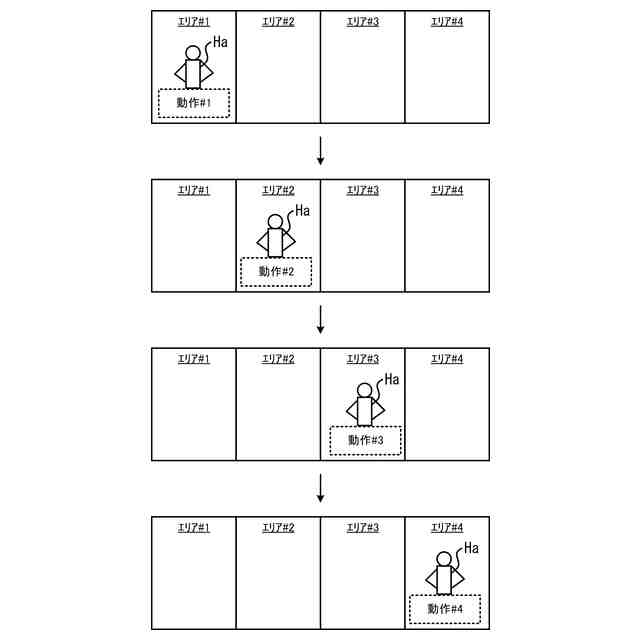
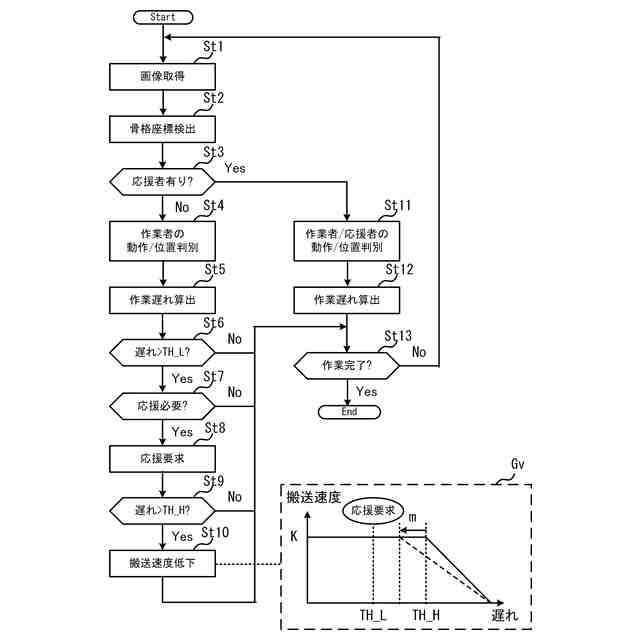
【解決手段】 作業管理装置は、所定方向に搬送中のワークに対して作業中の作業者を撮像した画像から、前記画像内の前記作業者の骨格の座標を検出する検出部と、前記作業者の骨格の座標の時間変化から前記作業者の動作及び前記所定方向上の位置を判別する判別部と、前記作業者の動作及び前記所定方向上の位置に基づき前記作業者の作業の遅れを算出する算出部と、前記遅れに応じて応援者に前記作業者の応援を要求する要求部とを有する。
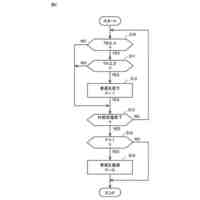
【選択図】図5
特許請求の範囲
【請求項1】
所定方向に搬送中のワークに対して作業中の作業者を撮像した画像から、前記画像内の前記作業者の骨格の座標を検出する検出部と、
前記作業者の骨格の座標の時間変化から前記作業者の動作及び前記所定方向上の位置を判別する判別部と、
前記作業者の動作及び前記所定方向上の位置に基づき前記作業者の作業の遅れを算出する算出部と、
前記遅れに応じて応援者に前記作業者の応援を要求する要求部とを有する、
作業管理装置。
続きを表示(約 590 文字)
【請求項2】
前記作業の遅れに応じて前記ワークの搬送速度を低下させる制御部を有する、
請求項1に記載の作業管理装置。
【請求項3】
前記制御部は、前記ワークに対して作業中の前記応援者が前記画像に撮像されている場合、前記ワークの搬送速度を低下させない、
請求項2に記載の作業管理装置。
【請求項4】
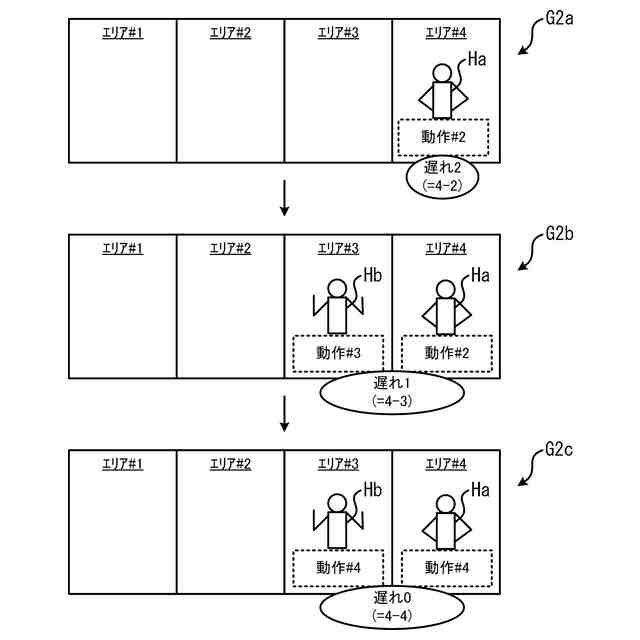
前記検出部は、前記ワークに対して作業中の前記作業者及び前記応援者を撮像した画像から、前記作業者及び前記応援者の骨格の座標をそれぞれ検出し、
前記判別部は、前記作業者の骨格の座標の時間変化から前記作業者の動作及び前記所定方向上の位置を判別し、前記応援者の骨格の座標の時間変化から前記応援者の動作及び前記所定方向上の位置を判別し、
前記算出部は、前記作業者の動作及び前記所定方向上の位置と、前記応援者の動作及び前記所定方向上の位置とに基づき前記作業の遅れを算出する、
請求項1乃至3の何れかに記載の作業管理装置。
【請求項5】
前記判別部は、前記画像内の前記作業者の骨格の座標を入力として、前記作業者の動作を出力する、教師あり学習による機械学習済みの判別モデルを用い、前記骨格の座標の時間変化に基づいて前記作業者の動作を判別する、
請求項1乃至3の何れかに記載の作業管理装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業管理装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
例えば特許文献1には、工場の生産ラインにおいて、作業者が押しボタンスイッチを押して作業の応援者の要請をアンドンなどの表示器に表示する点が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開平6-208690号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、作業者が応援を要請するタイミングには個人差があるため、適時に応援者を呼んで作業効率を向上することが難しい。
【0005】
そこで本発明は上記の課題に鑑みてなされたものであり、作業効率を向上することができる作業管理装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の作業管理装置は、所定方向に搬送中のワークに対して作業中の作業者を撮像した画像から、前記画像内の前記作業者の骨格の座標を検出する検出部と、前記作業者の骨格の座標の時間変化から前記作業者の動作及び前記所定方向上の位置を判別する判別部と、前記作業者の動作及び前記所定方向上の位置に基づき前記作業者の作業の遅れを算出する算出部と、前記遅れに応じて応援者に前記作業者の応援を要求する要求部とを有する。
【0007】
上記の作業管理装置において、前記作業の遅れに応じて前記ワークの搬送速度を低下させる制御部を有してもよい。
【0008】
上記の作業管理装置おいて、前記制御部は、前記ワークに対して作業中の前記応援者が前記画像に撮像されている場合、前記ワークの搬送速度を低下させなくてもよい。
【0009】
上記の作業管理装置おいて、前記検出部は、前記ワークに対して作業中の前記作業者及び前記応援者を撮像した画像から、前記作業者及び前記応援者の骨格の座標をそれぞれ検出し、前記判別部は、前記作業者の骨格の座標の時間変化から前記作業者の動作及び前記所定方向上の位置を判別し、前記応援者の骨格の座標の時間変化から前記応援者の動作及び前記所定方向上の位置を判別し、前記算出部は、前記作業者の動作及び前記所定方向上の位置と、前記応援者の動作及び前記所定方向上の位置とに基づき前記作業の遅れを算出してもよい。
【0010】
上記の作業管理装置おいて、前記判別部は、前記画像内の前記作業者の骨格の座標を入力として、前記作業者の動作を出力する、教師あり学習による機械学習済みの判別モデルを用い、前記骨格の座標の時間変化に基づいて前記作業者の動作を判別してもよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
単電池
6日前
トヨタ自動車株式会社
ロータ
7日前
トヨタ自動車株式会社
ロータ
14日前
トヨタ自動車株式会社
接合装置
今日
トヨタ自動車株式会社
分離装置
今日
トヨタ自動車株式会社
切替装置
6日前
トヨタ自動車株式会社
切替装置
6日前
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
充電装置
6日前
トヨタ自動車株式会社
連結構造
3日前
トヨタ自動車株式会社
連結車両
13日前
トヨタ自動車株式会社
電動車両
6日前
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
燃圧センサ
14日前
トヨタ自動車株式会社
高圧タンク
14日前
トヨタ自動車株式会社
熱管理回路
13日前
トヨタ自動車株式会社
オルタネータ
14日前
トヨタ自動車株式会社
配管保持構造
6日前
トヨタ自動車株式会社
情報処理装置
6日前
トヨタ自動車株式会社
情報処理装置
6日前
トヨタ自動車株式会社
車両制御装置
3日前
トヨタ自動車株式会社
運転支援装置
3日前
トヨタ自動車株式会社
車両制御装置
6日前
トヨタ自動車株式会社
風力発電装置
14日前
トヨタ自動車株式会社
情報処理装置
6日前
トヨタ自動車株式会社
車両制御装置
今日
トヨタ自動車株式会社
電池システム
今日
トヨタ自動車株式会社
充電制御装置
今日
トヨタ自動車株式会社
異常判定装置
6日前
トヨタ自動車株式会社
V型内燃機関
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
管理システム
6日前
トヨタ自動車株式会社
車両側部構造
6日前
トヨタ自動車株式会社
電極の製造方法
7日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ