TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025021549
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023125329
出願日
2023-08-01
発明の名称
異常判定装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G06T
7/00 20170101AFI20250206BHJP(計算;計数)
要約
【課題】自動運転システムの周辺認識モデルの異常の有無を適切に判定する。
【解決手段】自車両の自動運転システムの周辺認識に用いられる機械学習モデルである周辺認識モデルの異常の有無を判定する異常判定装置であって、自車両の外部センサの検出結果に基づいて、周辺認識モデルにより自車両の周囲の移動体の所定時刻における予測位置を推定する予測位置推定部と、複数の移動体の所定時刻における予測位置と複数の移動体の所定時刻における検出位置との比較結果に基づいて、周辺認識モデルの異常の有無を判定する異常判定部と、を備える。
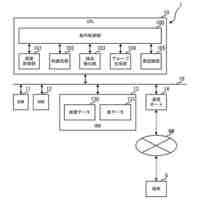
【選択図】図3
特許請求の範囲
【請求項1】
自車両の自動運転システムの周辺認識に用いられる機械学習モデルである周辺認識モデルの異常の有無を判定する異常判定装置であって、
前記自車両の外部センサの検出結果に基づいて、前記周辺認識モデルにより前記自車両の周囲の移動体の所定時刻における予測位置を推定する予測位置推定部と、
複数の前記移動体の前記所定時刻における予測位置と複数の前記移動体の前記所定時刻における検出位置との比較結果に基づいて、前記周辺認識モデルの異常の有無を判定する異常判定部と、
を備える、異常判定装置。
続きを表示(約 460 文字)
【請求項2】
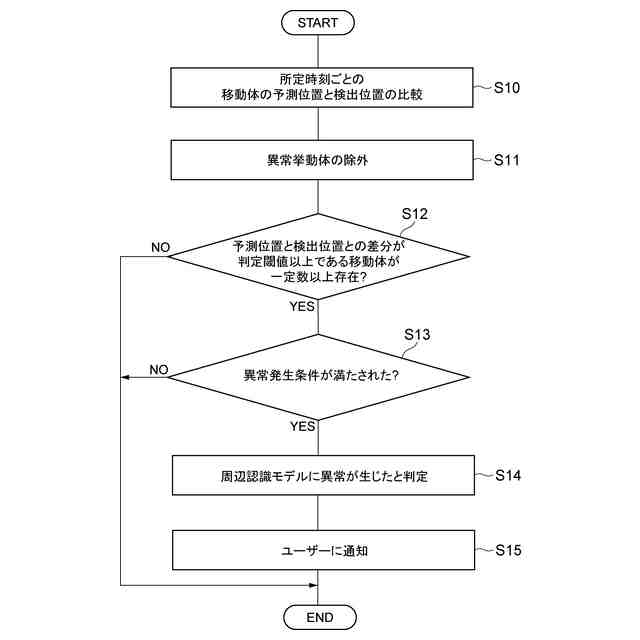
前記異常判定部は、前記予測位置と前記検出位置との差分が判定閾値以上である前記移動体が一定数以上存在し、且つ、前記予測位置及び前記検出位置に基づいて予め設定された異常発生条件が満たされたと判定された場合に、前記周辺認識モデルの異常が生じていると判定する、請求項1に記載の異常判定装置。
【請求項3】
前記異常判定部は、前記所定時刻における前記移動体の予測位置の数に対する前記所定時刻における前記移動体の検出位置の数の増加数又は減少数が誤差閾値以上である場合、前記異常発生条件が満たされたと判定する、請求項2に記載の異常判定装置。
【請求項4】
前記異常判定部は、前記移動体のうち予め設定された異常挙動を行っている異常挙動体を除外して前記周辺認識モデルの異常の有無の判定を行う、請求項1~3のうち何れか一項に記載の異常判定装置。
【請求項5】
前記異常判定部は、前記異常挙動体の存在を前記自車両のユーザーに通知する、請求項4に記載の異常判定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、異常判定装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、異常判定装置に関する技術文献として、特開2022―032109号公報が知られている。この公報には、複数の異なる種類の検出器から取得した検出結果を用いて衝突の判定対象となる物体の移動特性の信頼度を決定する衝突防止システムにおいて、所定の指標(対象物体の姿勢と速度ベクトルとの乖離)に基づいて、算出された対象物体の姿勢または速度ベクトルの誤差が大きく信頼度が低下している決定することが示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022―032109号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自動運転システムによる自車両の周辺認識に機械学習モデルを用いることが検討されている。この場合、自動運転システムの周辺認識に異常が発生した場合に、センサなどの異常であるか、機械学習モデルの異常であるかを適切に判定することが求められている。
【課題を解決するための手段】
【0005】
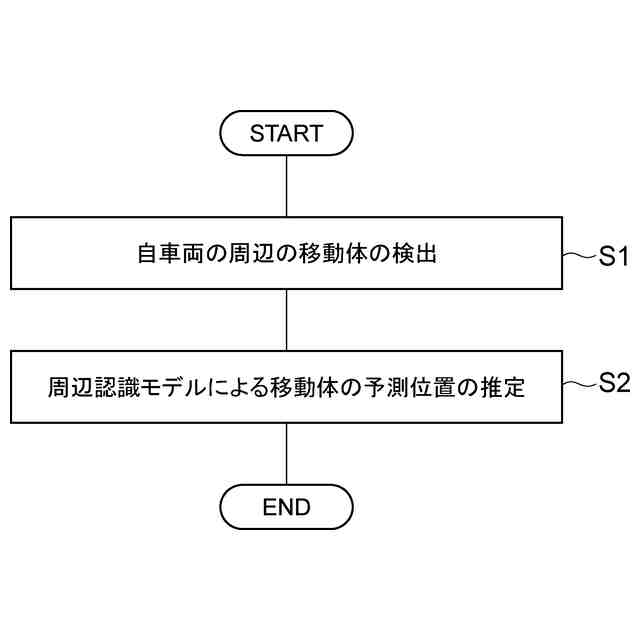
本発明の一態様は、自車両の自動運転システムの周辺認識に用いられる機械学習モデルである周辺認識モデルの異常の有無を判定する異常判定装置であって、自車両の外部センサの検出結果に基づいて、周辺認識モデルにより自車両の周囲の移動体の所定時刻における予測位置を推定する予測位置推定部と、複数の移動体の所定時刻における予測位置と複数の移動体の所定時刻における検出位置との比較結果に基づいて、周辺認識モデルの異常の有無を判定する異常判定部と、を備える。
【0006】
本発明の一態様に係る異常判定装置によれば、自動運転システムの周辺認識モデルに異常が発生した場合には、複数の移動体の所定時刻における予測位置と複数の移動体の所定時刻における検出位置との比較結果に特徴的な影響が出ると考えられることから、当該比較結果に基づいて周辺認識モデルの異常の有無を適切に判定することができる。
【0007】
本発明の一態様に係る異常判定装置において、異常判定部は、予測位置と検出位置との差分が判定閾値以上である移動体が一定数以上存在し、且つ、予測位置及び検出位置に基づいて予め設定された異常発生条件が満たされたと判定された場合に、周辺認識モデルの異常が生じていると判定してもよい。
【発明の効果】
【0008】
本発明の一態様によれば、自動運転システムの周辺認識モデルの異常の有無を適切に判定することができる。
【図面の簡単な説明】
【0009】
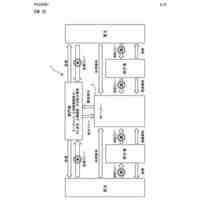
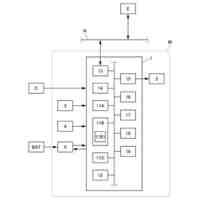
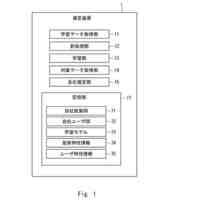
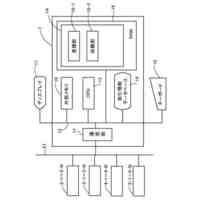
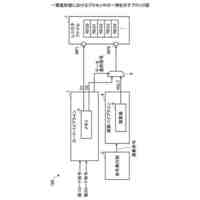
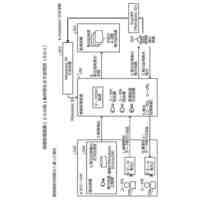
一実施形態に係る自動運転システム(異常判定装置)を示すブロック図である。
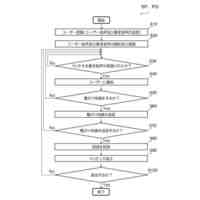
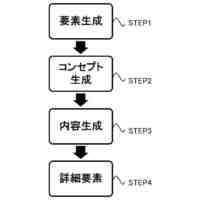
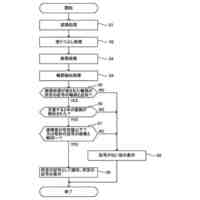
予測位置推定処理の一例を示すフローチャートである。
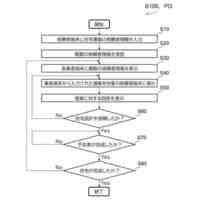
異常判定処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報提示方法
27日前
個人
自動精算システム
2か月前
個人
RFタグ読取装置
1か月前
個人
アカウントマップ
20日前
個人
プログラム
19日前
個人
プログラム
26日前
個人
自動精算システム
1か月前
個人
売買システム
1か月前
個人
管理サーバ
1か月前
個人
発想支援方法及びシステム
1か月前
個人
市場受発注システム
1か月前
キヤノン株式会社
印刷装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
個人
学習装置及び推論装置
19日前
個人
分類処理プログラム及び方法
1か月前
個人
案件管理装置および端末装置
6日前
個人
VRによる人体各部位の立体化
1か月前
富士通株式会社
金融システム
27日前
井関農機株式会社
ロボット作業車両
1か月前
株式会社発明屋
電池指向の構造設計
13日前
トヨタ自動車株式会社
推定装置
2か月前
トヨタ自動車株式会社
管理装置
14日前
個人
未来型家系図構築システム
2か月前
株式会社SEKT
文字認識装置
2か月前
キヤノン株式会社
情報処理装置
1か月前
個人
ダブルオークションシステム
2日前
株式会社プレニーズ
仲介システム
20日前
株式会社イズミ
総合代行システム
2日前
富士通株式会社
プロセッサ
12日前
トヨタ自動車株式会社
表認識装置
2か月前
富士通株式会社
予測
5日前
トヨタ自動車株式会社
記号識別方法
1か月前
富士通株式会社
情報処理プログラム
2か月前
村田機械株式会社
人員配置システム
1か月前
個人
情報処理装置およびプログラム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ