TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025028566
公報種別
公開特許公報(A)
公開日
2025-03-03
出願番号
2023133466
出願日
2023-08-18
発明の名称
ロボット制御装置、ロボット制御方法、ロボット制御プログラム
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20250221BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットにおける可動部の移動速度を適切に増加させられるロボット制御装置等を提供する。
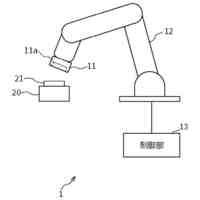
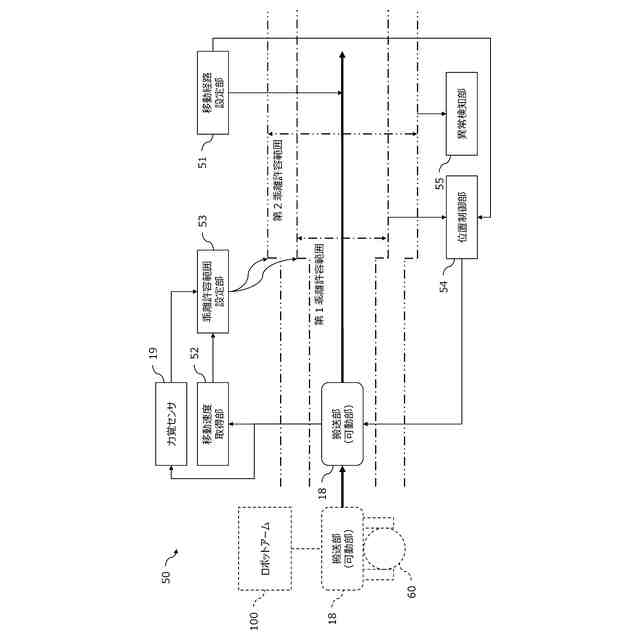
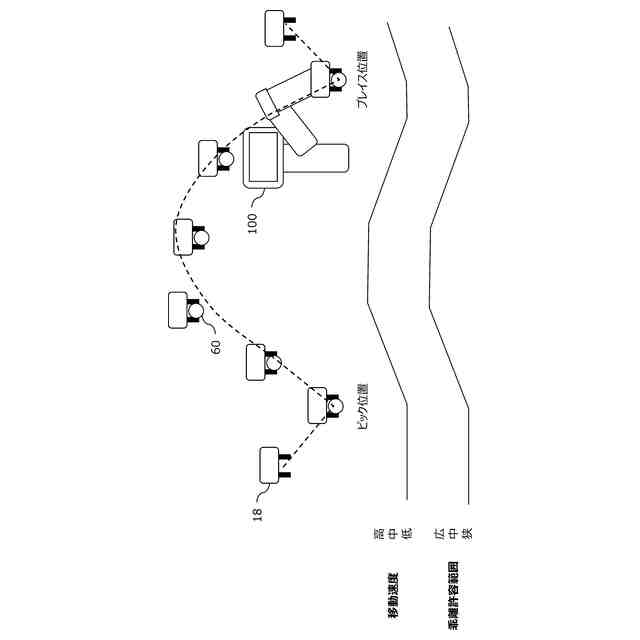
【解決手段】ロボット制御装置50は、ロボットアーム100における可動部の移動経路を設定する移動経路設定部51と、可動部の移動速度を取得する移動速度取得部52と、可動部の位置の移動経路からの乖離許容範囲を設定する乖離許容範囲設定部53であって、移動速度の増加に応じて乖離許容範囲を拡大する乖離許容範囲設定部53と、を備える。乖離許容範囲設定部53は、移動速度の減少に応じて乖離許容範囲を縮小する。可動部は、被搬送物60を移動経路に沿って搬送する搬送部18である。
【選択図】図4
特許請求の範囲
【請求項1】
ロボットにおける可動部の移動経路を設定する移動経路設定部と、
前記可動部の移動速度を取得する移動速度取得部と、
前記可動部の位置の前記移動経路からの乖離許容範囲を設定する乖離許容範囲設定部であって、前記移動速度の増加に応じて前記乖離許容範囲を拡大する乖離許容範囲設定部と、
を備えるロボット制御装置。
続きを表示(約 980 文字)
【請求項2】
前記乖離許容範囲設定部は、前記移動速度の減少に応じて前記乖離許容範囲を縮小する、請求項1に記載のロボット制御装置。
【請求項3】
前記可動部は、被搬送物を前記移動経路に沿って搬送する搬送部である、請求項2に記載のロボット制御装置。
【請求項4】
前記搬送部が前記被搬送物を持つ際および/または離す際の前記移動速度および前記乖離許容範囲は、当該搬送部が当該被搬送物を搬送している際の前記移動速度および前記乖離許容範囲より小さい、請求項3に記載のロボット制御装置。
【請求項5】
前記可動部の位置が前記乖離許容範囲を外れた場合に、当該可動部の位置を当該乖離許容範囲内に戻す位置制御部を備える、請求項1から4のいずれかに記載のロボット制御装置。
【請求項6】
前記可動部の位置が前記乖離許容範囲を外れた場合に、異常を検知する異常検知部を備える、請求項1から4のいずれかに記載のロボット制御装置。
【請求項7】
前記乖離許容範囲設定部は、前記乖離許容範囲として、第1乖離許容範囲と、当該第1乖離許容範囲より広い第2乖離許容範囲と、を設定し、
前記可動部の位置が前記第1乖離許容範囲を外れた場合に、当該可動部の位置を当該第1乖離許容範囲内に戻す位置制御部と、
前記可動部の位置が前記第2乖離許容範囲を外れた場合に、異常を検知する異常検知部と、
を備える請求項1から4のいずれかに記載のロボット制御装置。
【請求項8】
ロボットにおける可動部の移動経路を設定することと、
前記可動部の移動速度を取得することと、
前記可動部の位置の前記移動経路からの乖離許容範囲を設定することであって、前記移動速度の増加に応じて前記乖離許容範囲を拡大することと、
を実行するロボット制御方法。
【請求項9】
ロボットにおける可動部の移動経路を設定することと、
前記可動部の移動速度を取得することと、
前記可動部の位置の前記移動経路からの乖離許容範囲を設定することであって、前記移動速度の増加に応じて前記乖離許容範囲を拡大することと、
をコンピュータに実行させるロボット制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット制御装置等に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
工場、物流倉庫、建設現場、病院等の産業現場において、人間の代わりに各種の作業を行う産業用ロボットが導入されている。従来の産業用ロボットは大型で高出力のものが多く、安全のために人間が入れない隔離空間を設けて作業を行わせる必要があった。一方、近年では人間と同じ空間で一緒に作業を行う協働ロボットの導入も進んでいる。従来の産業用ロボットと比べて小型の協働ロボットは狭いスペースに設置でき、低出力であることから安全確保のための大がかりなシステムを必要としない。
【先行技術文献】
【特許文献】
【0003】
特開2017-26150号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
協働ロボットでは、安全性等の観点から、ロボットハンド等の可動部の所期の移動経路からの乖離についての許容範囲が狭く設定される傾向がある。しかし、安全面やロボットハンド等による作業精度に問題がない場合に、可動部の移動速度を増加させると狭い許容範囲を外れやすくなってしまうという課題がある。
【0005】
本開示はこうした状況に鑑みてなされたものであり、ロボットにおける可動部の移動速度を適切に増加させられるロボット制御装置等を提供することを目的とする。なお、以上では協働ロボットを例示したが、本開示は協働ロボットに限定されない一般的な産業用ロボットとしてのロボットアーム等にも適用可能である。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本開示のある態様のロボット制御装置は、ロボットにおける可動部の移動経路を設定する移動経路設定部と、可動部の移動速度を取得する移動速度取得部と、可動部の位置の移動経路からの乖離許容範囲を設定する乖離許容範囲設定部であって、移動速度の増加に応じて乖離許容範囲を拡大する乖離許容範囲設定部と、を備える。
【0007】
本態様によれば、可動部の移動速度の増加に応じて乖離許容範囲が拡大されるため、当該可動部の位置が当該乖離許容範囲を外れにくくなる。
【0008】
本開示の別の態様は、ロボット制御方法である。この方法は、ロボットにおける可動部の移動経路を設定することと、可動部の移動速度を取得することと、可動部の位置の移動経路からの乖離許容範囲を設定することであって、移動速度の増加に応じて乖離許容範囲を拡大することと、を実行する。
【0009】
なお、以上の構成要素の任意の組合せや、これらの表現を方法、装置、システム、記録媒体、コンピュータプログラム等に変換したものも、本開示に包含される。
【発明の効果】
【0010】
本開示によれば、ロボットにおける可動部の移動速度を適切に増加させられる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
27日前
株式会社アイセイ
搬送装置
今日
株式会社マキタ
電動工具
1か月前
国立大学法人金沢大学
ロボット
6日前
株式会社マキタ
電動工具
20日前
株式会社ケー・エフ・シー
締結構造
10日前
日本車輌製造株式会社
締め付け工具
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
川崎重工業株式会社
ロボットリスト
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
CKD株式会社
吸着型搬送装置
1か月前
日本信号株式会社
作業機制御システム
20日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社京阪エンジニアリング
脱着装置
21日前
株式会社マキタ
集塵アタッチメント
20日前
株式会社スター精機
ワーク搬送装置
24日前
アピュアン株式会社
衝撃工具
1日前
トヨタ自動車株式会社
把持装置、把持方法
14日前
モトコマ株式会社
寄せポンチホルダー
1か月前
株式会社コスメック
把持装置
7日前
川崎重工業株式会社
ロボットシステム
27日前
トヨタ自動車株式会社
制御装置及び制御方法
1か月前
株式会社ダイヘン
ロボット制御システム
10日前
有限会社松尾エンジニアリング
連結部材
1か月前
株式会社DailyColor
ロボットハンド
1か月前
国立大学法人 東京大学
ロボットアーム
7日前
個人
ターンバックル用工具
1か月前
株式会社不二越
ロボットビジョンシステム
13日前
株式会社SHIN‐JIGEN
上肢アシスト装置
1か月前
原利興工業有限公司
工具用スリーブ
6日前
株式会社マキタ
電動工具
27日前
株式会社マキタ
電動工具
今日
株式会社マキタ
作業機
6日前
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
今日
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ