TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025028538
公報種別
公開特許公報(A)
公開日
2025-03-03
出願番号
2023133409
出願日
2023-08-18
発明の名称
ロボット制御装置、位置算出方法及びそれに用いられるセンサ装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250221BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットに保持されているセンサの傾きを考慮して、当該センサによって検知される対象の位置を適切に算出可能なロボット制御装置、位置算出方法及びそれに用いられるセンサ装置を提供することである。
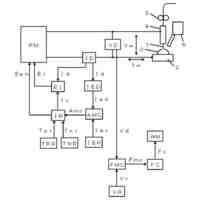
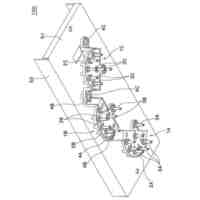
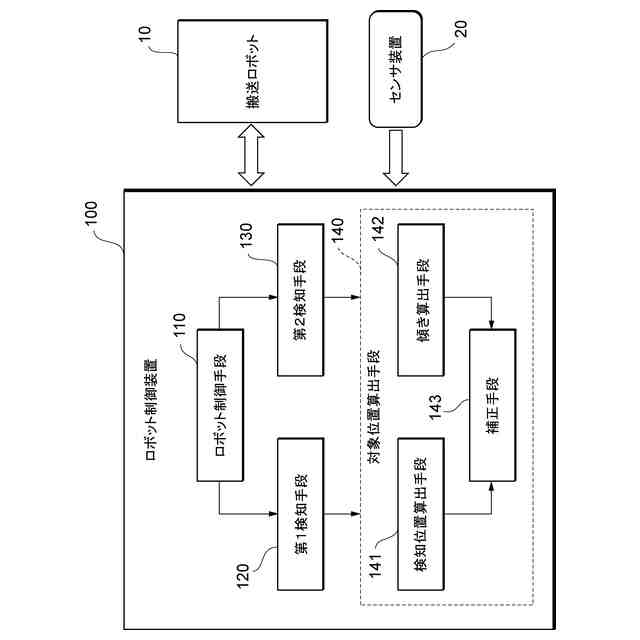
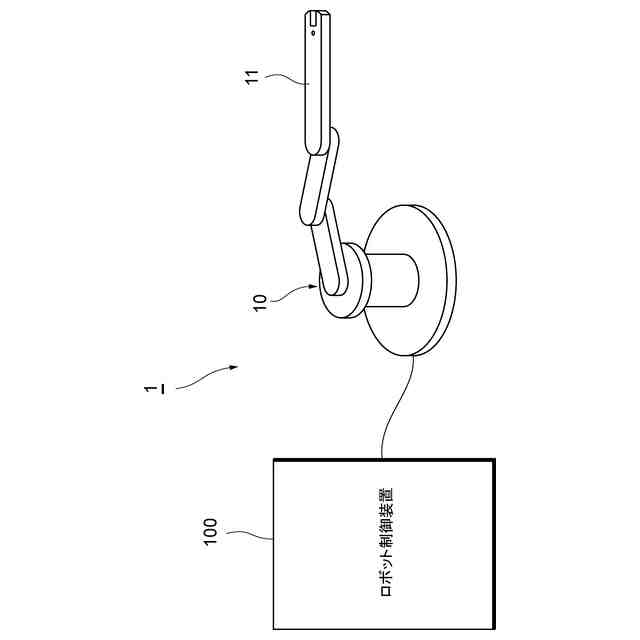
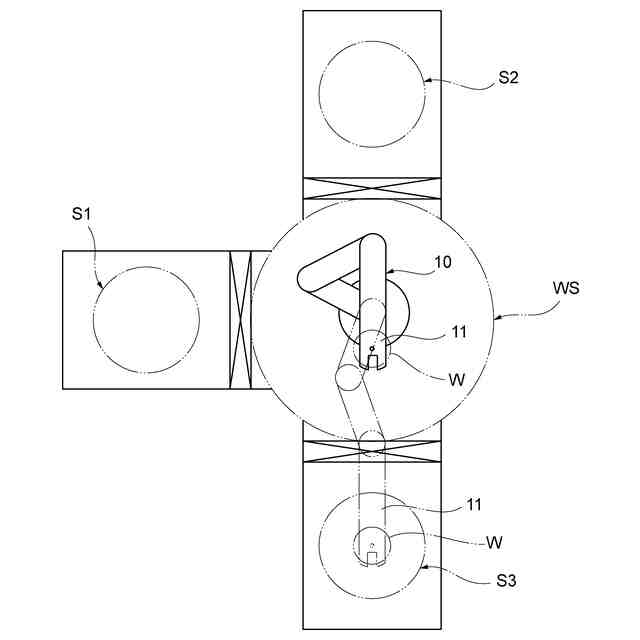
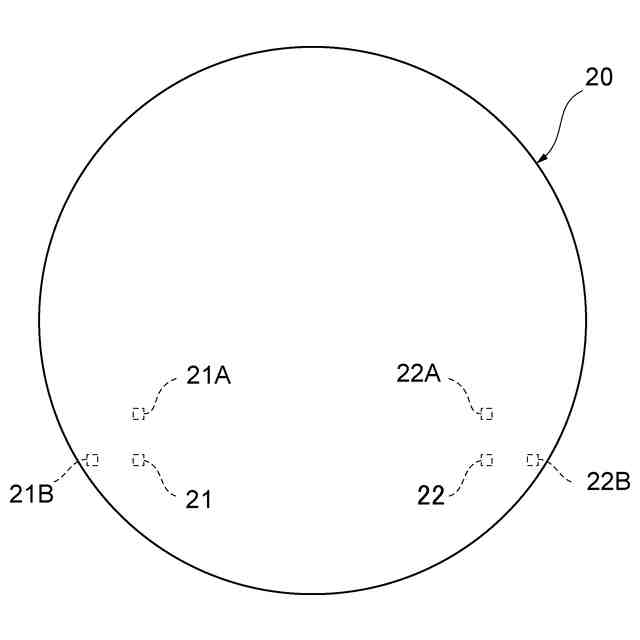
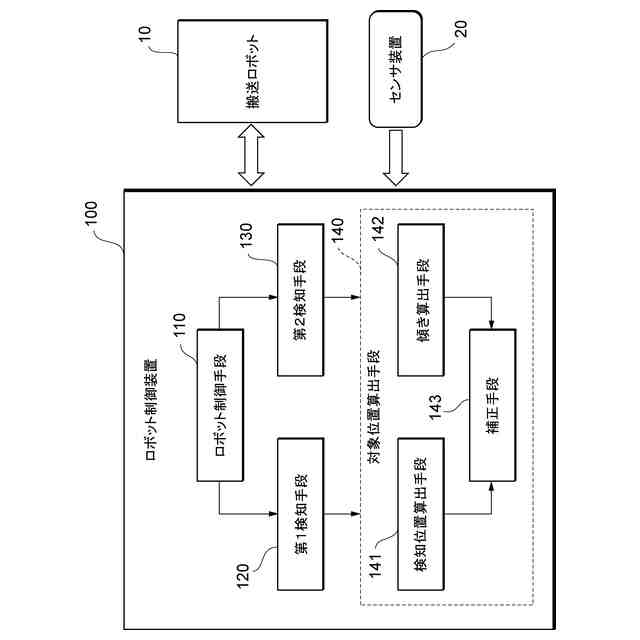
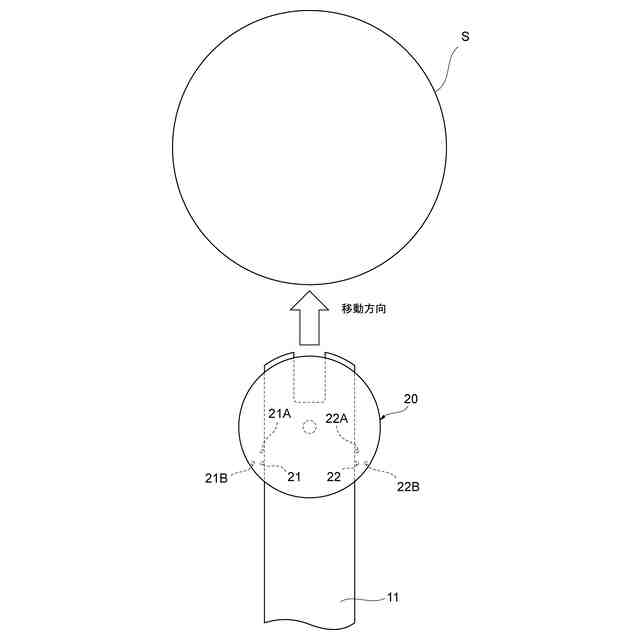
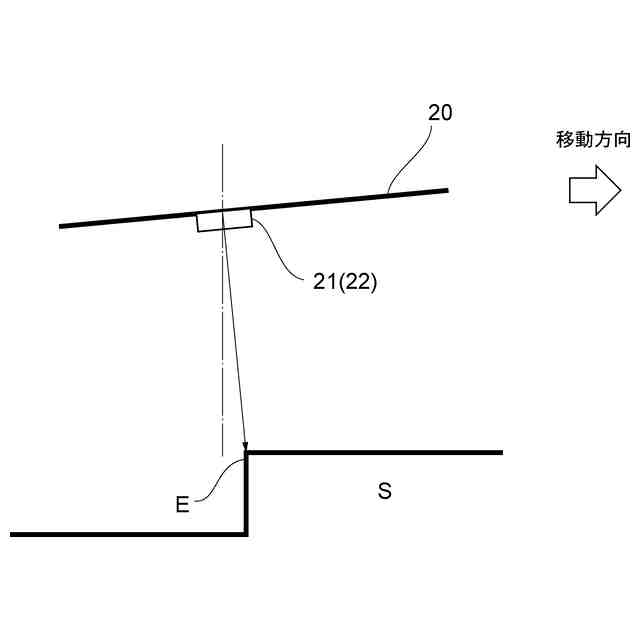
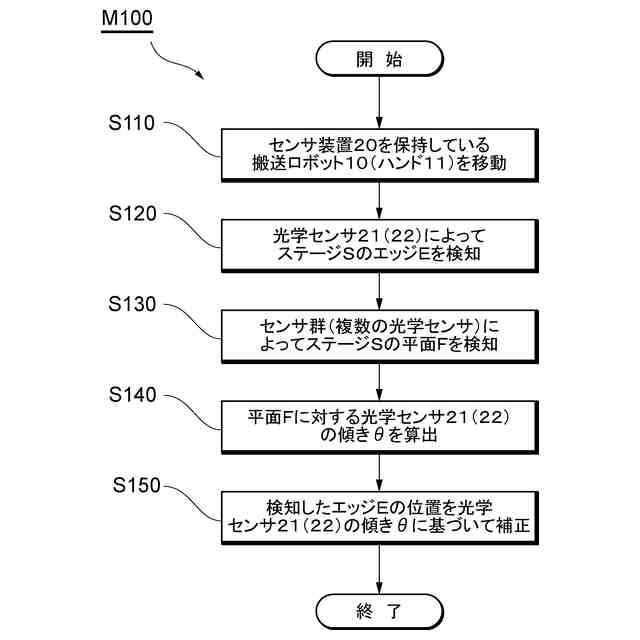
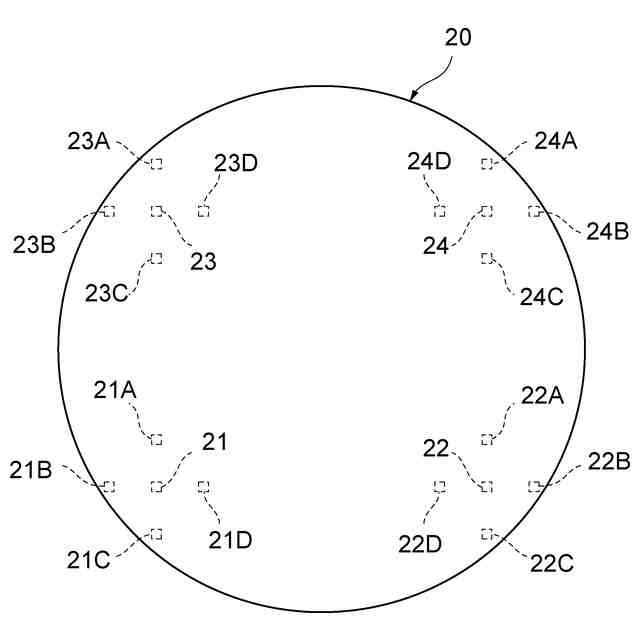
【解決手段】ロボット制御装置100は、ロボット制御手段110によってロボット10を動作させることにより、ロボット10に保持されている対象用センサ21,22によって対象Eを検知する第1検知手段120と、ロボット10に保持されている複数のセンサ21,21A,21B,22,22A,22Bで構成されるセンサ群によって対象Eが含まれている平面Fを検知する第2検知手段130と、センサ群における複数のセンサそれぞれによって検知された平面Fまでの各距離、及び対象用センサ21,22とセンサ群との位置情報に基づいて、対象用センサ21,22によって検知された対象Eの位置を算出する対象位置算出手段140と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
ロボットの動作を制御するロボット制御装置であって、
前記ロボットを動作させるロボット制御手段と、
前記ロボット制御手段によって前記ロボットを動作させることにより、前記ロボットに保持されている対象用センサによって対象を検知する第1検知手段と、
前記ロボット制御手段によって前記ロボットを動作させることにより、前記ロボットに保持されている複数のセンサで構成されるセンサ群によって前記対象が含まれている平面を検知する第2検知手段と、
前記センサ群における複数のセンサそれぞれによって検知された前記平面までの各距離、及び前記対象用センサと前記センサ群との位置情報に基づいて、前記対象用センサによって検知された対象の位置を算出する対象位置算出手段と、を備える、
ロボット制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記対象位置算出手段は、
前記対象用センサによって検知された対象の検知位置を算出する検知位置算出手段と、
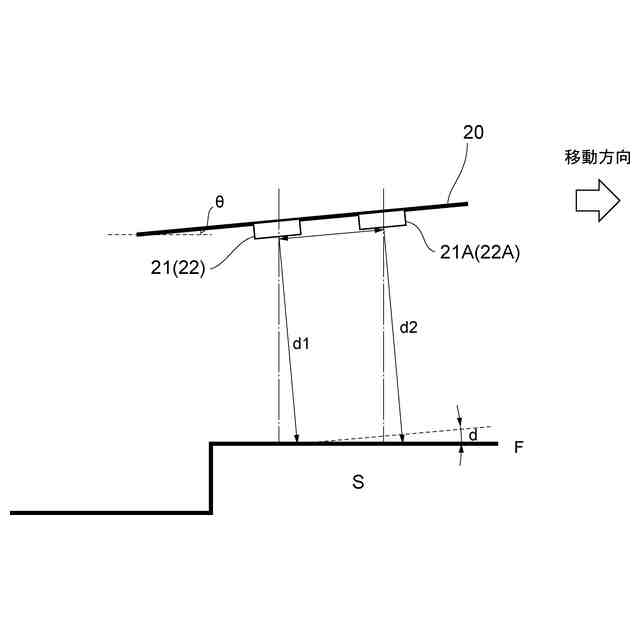
前記センサ群における複数のセンサそれぞれによって検知された前記平面までの各距離と、前記センサ群における複数のセンサ間の各距離とに基づいて、前記平面に対する前記対象用センサの傾きを算出する傾き算出手段と、
前記対象用センサの傾きに基づいて、前記対象の検知位置を補正する補正手段と、を含む、
請求項1に記載のロボット制御装置。
【請求項3】
前記対象用センサ及び前記センサ群における複数のセンサは、同一平面上に配置されている、
請求項1に記載のロボット制御装置。
【請求項4】
前記センサ群は、第1センサと、当該第1センサに対応する第2センサとで構成される一対のセンサグループを2つ含む、
請求項1に記載のロボット制御装置。
【請求項5】
前記2つの一対のセンサグループは、互いに直交するように配置される、
請求項4に記載のロボット制御装置。
【請求項6】
前記対象用センサは、前記センサ群における複数のセンサのうちの1つのセンサとして機能する、
請求項1に記載のロボット制御装置。
【請求項7】
前記対象用センサは、少なくとも第1対象用センサ及び第2対象用センサとして設けられ、
前記センサ群は、前記第1対象用センサ及び前記第2対象用センサのそれぞれに対応するように少なくとも第1センサ群及び第2センサ群として設けられる、
請求項1に記載のロボット制御装置。
【請求項8】
前記第1センサ群における複数のセンサと前記第1対象用センサとの各距離は、前記第1センサ群における複数のセンサ及び前記第1対象用センサのうちいずれかと最も近い前記第2センサ群における複数のセンサ及び前記第2対象用センサのうちいずれかとの距離よりも小さい、
請求項7に記載のロボット制御装置。
【請求項9】
前記対象用センサ及び前記センサ群における複数のセンサは、前記ロボットに保持されるセンサ装置に設けられる、
請求項1~8のいずれか一項に記載のロボット制御装置。
【請求項10】
ロボットの動作を制御するロボット制御装置が実行する対象の位置を算出する位置算出方法であって、
前記ロボットを動作させるロボット制御ステップと、
前記ロボット制御ステップにおいて前記ロボットを動作させることにより、前記ロボットに保持されている対象用センサによって対象を検知する第1検知ステップと、
前記ロボット制御ステップにおいて前記ロボットを動作させることにより、前記ロボットに保持されている複数のセンサで構成されるセンサ群によって前記対象が含まれている平面を検知する第2検知ステップと、
前記センサ群における複数のセンサそれぞれによって検知された前記平面までの各距離、及び前記対象用センサと前記センサ群との位置情報に基づいて、前記対象用センサによって検知された対象の位置を算出する対象位置算出ステップと、を含む、
位置算出方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御装置、位置算出方法及びそれに用いられるセンサ装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、産業界において、多くのロボットが普及している。当該ロボットは、例えば、電子部品及び機械部品の組み立て、溶接及び搬送等に用いられ、工場の生産ラインの効率化及び自動化が図られている。
【0003】
半導体製造装置に用いられるウエハを搬送する搬送ロボットでは、ウエハを適切な位置へ搬送するためのティーチングを行うが、その精度は、操作者の知識及び熟練度などに依存し、また、操作者の作業スペースが十分に確保できない程の省スペース化が求められている場合もあるため、ティーチングの自動化が図られている。
【0004】
例えば、特許文献1では、3つの光学センサが設けられた基板型治具がハンドにより保持された状態で、基板保持部を回転させることにより当該基板保持部上に予め設けられている目印の円周状の回転軌跡を形成する。そして、3つの光学センサからそれぞれ得られた回転軌跡に対する相対位置に基づいて、ハンドの基板保持部に対する平面視における相対位置を算出する技術が開示されている。
【0005】
このように、3つの光学センサを用いながら、ロボットと目標位置との位置関係、及び障害物などの周辺環境を把握して、対象物を適切に目標位置まで搬送する技術が知られている。
【先行技術文献】
【特許文献】
【0006】
特開2022-148237号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1では、3つの光学センサが設けられた基板型治具がハンドに保持された状態において、その3つの光学センサの傾きを考慮していない。例えば、基板型治具を保持するハンドそのものが水平でない場合、光学センサが設けられている基板型治具そのものが一様な平面でない場合、ハンドに基板型治具を載置することにより当該ハンドが傾く場合、及び基板型治具に光学センサが傾いて取り付けられている場合など様々な要因が考えられる。
【0008】
そこで、本発明は、ロボットに保持されているセンサの傾きを考慮して、当該センサによって検知される対象の位置を適切に算出可能なロボット制御装置、位置算出方法及びそれに用いられるセンサ装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一態様に係るロボット制御装置は、ロボットの動作を制御するロボット制御装置であって、ロボットを動作させるロボット制御手段と、ロボット制御手段によってロボットを動作させることにより、ロボットに保持されている対象用センサによって対象を検知する第1検知手段と、ロボット制御手段によってロボットを動作させることにより、ロボットに保持されている複数のセンサで構成されるセンサ群によって対象が含まれている平面を検知する第2検知手段と、センサ群における複数のセンサそれぞれによって検知された平面までの各距離、及び対象用センサとセンサ群との位置情報に基づいて、対象用センサによって検知された対象の位置を算出する対象位置算出手段と、を備える。
【0010】
この態様によれば、第1検知手段は、ロボットに保持されている対象用センサによって対象を検知し、第2検知手段は、ロボットに保持されている複数のセンサで構成されるセンサ群によって対象が含まれている平面を検知する。そして、対象位置算出手段は、センサ群における複数のセンサそれぞれによって検知された平面までの各距離、及び対象用センサとセンサ群との位置情報に基づいて、対象用センサによって検知された対象の位置を算出する。これにより、ロボットに保持されているセンサの傾きを考慮して、当該センサによって検知される対象の位置を適切に算出することができる。その結果、対象の位置に基づいて算出された目標位置に、対象物を高精度に搬送することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
電気機器
4日前
株式会社ダイヘン
溶接トーチ
14日前
株式会社ダイヘン
電圧調整装置
14日前
株式会社ダイヘン
タップ切換台
17日前
株式会社ダイヘン
蓄電池システム
4日前
株式会社ダイヘン
熱加工用電源装置
20日前
株式会社ダイヘン
ブッシング及び電気機器
11日前
株式会社ダイヘン
サブマージアーク溶接装置
11日前
株式会社ダイヘン
2重シールドティグ溶接方法
11日前
株式会社ダイヘン
電力システム、および、集中管理装置
6日前
株式会社ダイヘン
システム、装置、および、時刻同期方法
14日前
株式会社ダイヘン
タップ切換台ユニット及びタップ切換台
17日前
株式会社ダイヘン
ホール電流検出器の断路検知を備えた溶接電源
10日前
株式会社ダイヘン
プログラム、情報処理方法、及び情報処理装置
17日前
株式会社ダイヘン
溶接トーチ
14日前
株式会社ダイヘン
コイルボビン及び変成器
20日前
株式会社アイセイ
搬送装置
25日前
川崎重工業株式会社
ハンド
19日前
個人
けがき用治具
13日前
株式会社不二越
ロボット
11日前
国立大学法人金沢大学
ロボット
1か月前
株式会社不二越
ロボット操作装置
10日前
個人
深孔スリーブ駆動ロッド構造
3日前
株式会社ケー・エフ・シー
締結構造
1か月前
川崎重工業株式会社
ロボット
11日前
株式会社デンソー
操縦桿
11日前
株式会社黒澤鉄工製作所
けがき用治具
13日前
個人
バール
3日前
川崎重工業株式会社
ロボットシステム
19日前
日本信号株式会社
作業機制御システム
1か月前
梅馨堂合同会社
人協働ロボットシステム
5日前
株式会社不二越
基板搬送用ロボット
20日前
ARMA株式会社
UI付エンドエフェクタ
6日前
アピュアン株式会社
衝撃工具
26日前
株式会社マキタ
集塵アタッチメント
1か月前
トヨタ自動車株式会社
把持装置、把持方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ