TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025028265
公報種別
公開特許公報(A)
公開日
2025-02-28
出願番号
2024221283,2024019251
出願日
2024-12-18,2020-08-05
発明の名称
作業機械の制御方法
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
E02F
9/26 20060101AFI20250220BHJP(水工;基礎;土砂の移送)
要約
【課題】作業者にマークの意味を学習させることができる作業機械の制御方法を提供する。
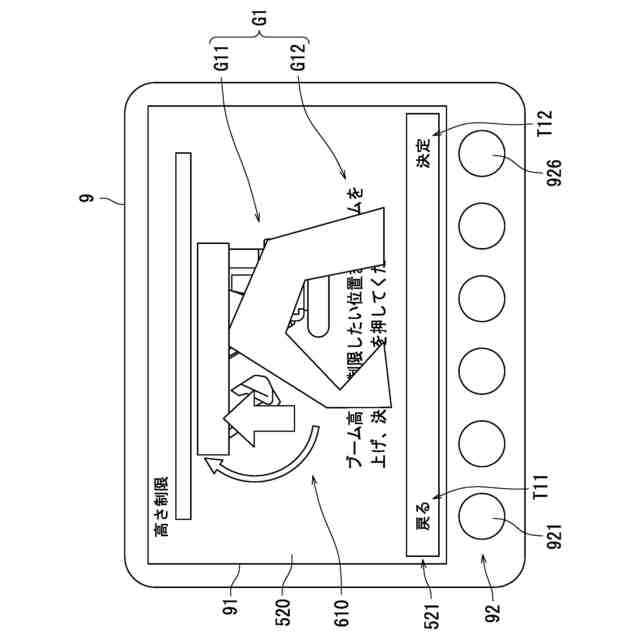
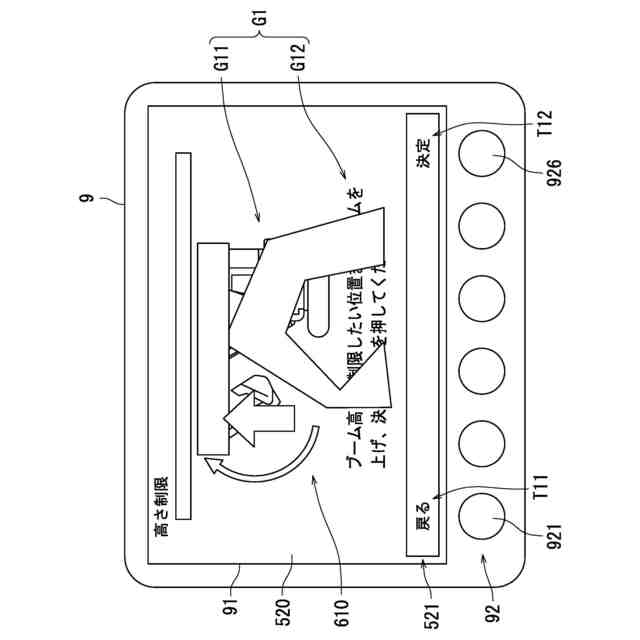
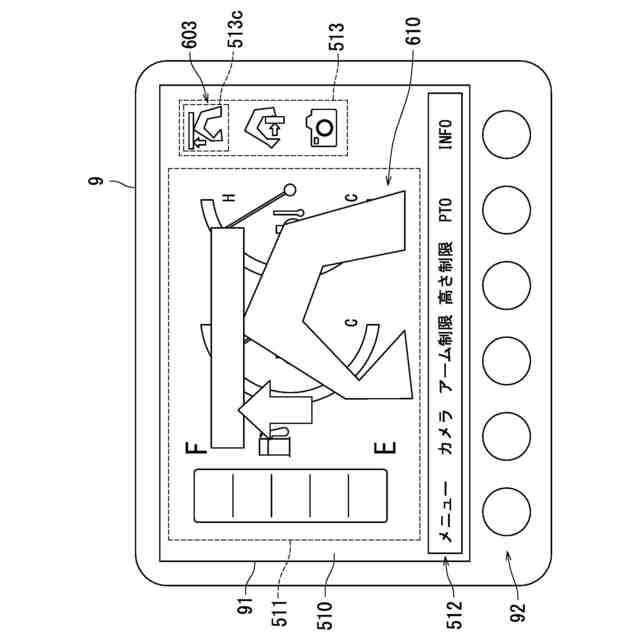
【解決手段】作業機械の制御方法は、設定された機能を示す第1マークを表示する第1画面と、機能を設定するための第2画面(ガイダンス画面520)と、を表示する表示部91を備える作業機械の制御方法であって、前記機能の設定が選択されると、表示部91に第1マークに対応する第2マーク(第1学習用マーク画像610)を表示させることと、第2マーク(第1学習用マーク画像610)の表示後、表示部91に表示させる画面から、第2マーク(第1学習用マーク画像610)を消去することと、を有する。
【選択図】図6
特許請求の範囲
【請求項1】
設定された機能を示す第1マークを表示する第1画面と、前記機能を設定するための第2画面と、を表示する表示部を備える作業機械の制御方法であって、
前記機能の設定が選択されると、前記表示部に前記第1マークに対応する第2マークを表示させることと、
前記第2マークの表示後、前記表示部に表示させる画面から、前記第2マークを消去することと
を有する作業機械の制御方法。
続きを表示(約 340 文字)
【請求項2】
前記第2マークは、前記第1マークと比べて大きく表示される、請求項1に記載の作業機械の制御方法。
【請求項3】
前記機能の設定の選択前は、前記表示部に前記第2マークを含むことなく前記第2画面を表示させ、
前記機能の設定の選択後は、前記第2マークを含む前記第2画面を表示させる、請求項1又は2に記載の作業機械の制御方法。
【請求項4】
前記第2マークを含む前記第2画面の表示後に前記第2画面から遷移する前記第1画面は、前記第2マークを含む、請求項3に記載の作業機械の制御方法。
【請求項5】
前記第2マークは、前記第1画面において前記第1マークと重ならない位置に表示される、請求項4に記載の作業機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
自機の状態を、自機に装備されている表示装置を介して作業者に認識させる作業機械が知られている。例えば、特許文献1の建設機械は、表示装置に、状態変化表示マークを表示させる。具体的には、表示装置は、建設機械の状態が変化した場合、表示画面の特定の表示箇所に状態変化表示マークを表示させる。
【先行技術文献】
【特許文献】
【0003】
特開2012-72653号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、作業者は、表示装置に表示されるマークの意味を知らない場合がある。したがって、マークを表示させるだけでは、作業者に作業機械の状態の変化を認識させることができない場合がある。
【0005】
本発明は上記課題に鑑みてなされたものであり、その目的は、作業者にマークの意味を学習させることができる作業機械の制御方法を提供することにある。
【課題を解決するための手段】
【0006】
本発明に係る作業機械の制御方法は、設定された機能を示す第1マークを表示する第1画面と、前記機能を設定するための第2画面と、を表示する表示部を備える作業機械の制御方法であって、前記機能の設定が選択されると、前記表示部に前記第1マークに対応する第2マークを表示させることと、前記第2マークの表示後、前記表示部に表示させる画面から、前記第2マークを消去することと、を有する。
【発明の効果】
【0007】
本発明によれば、作業者にマークの意味を学習させることができる。
【図面の簡単な説明】
【0008】
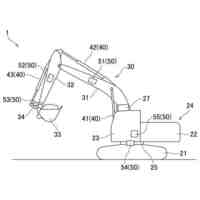
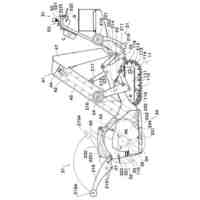
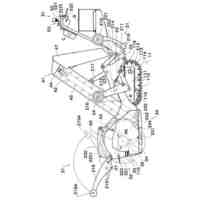
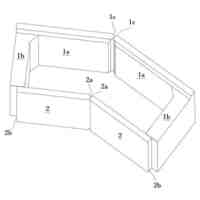
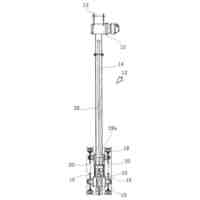
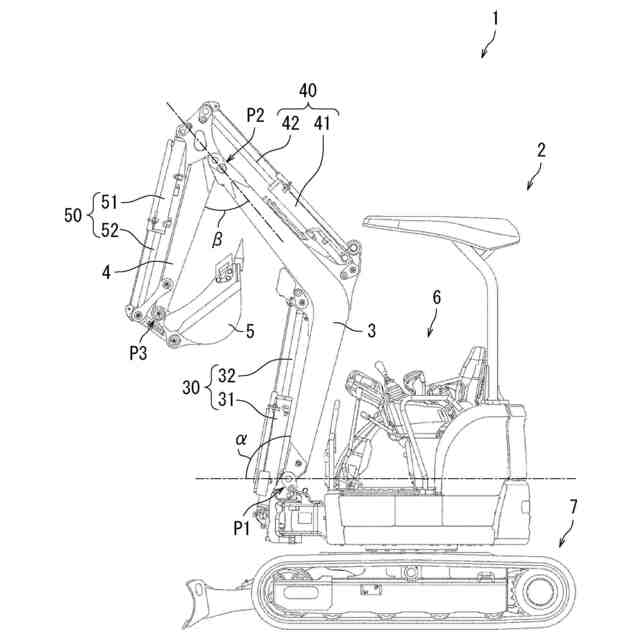
本発明の実施形態1に係る作業機械の側面図である。
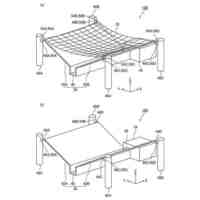
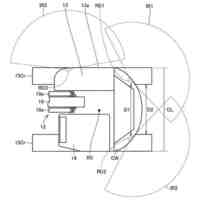
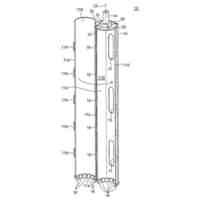
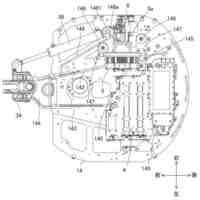
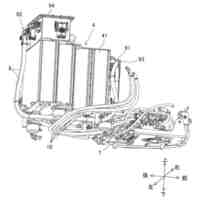
作業機械における機械本体の斜視図である。
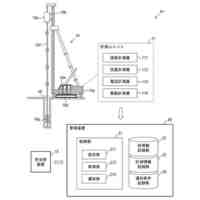
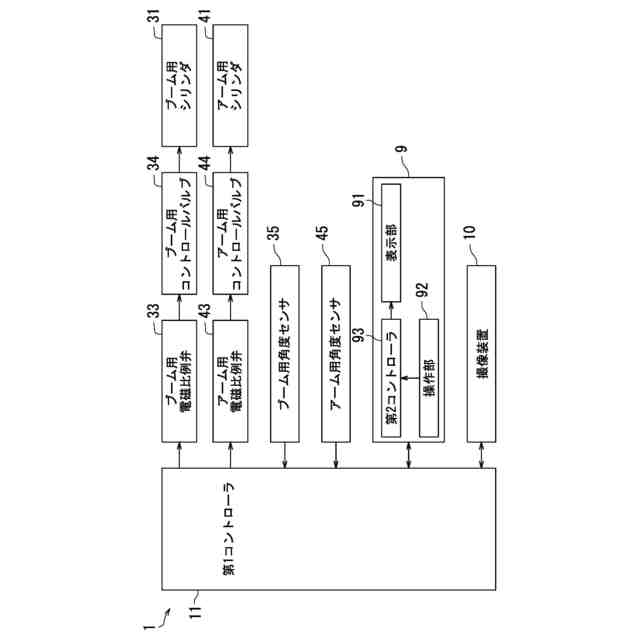
作業機械のブロック図である。
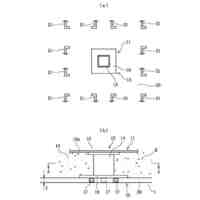
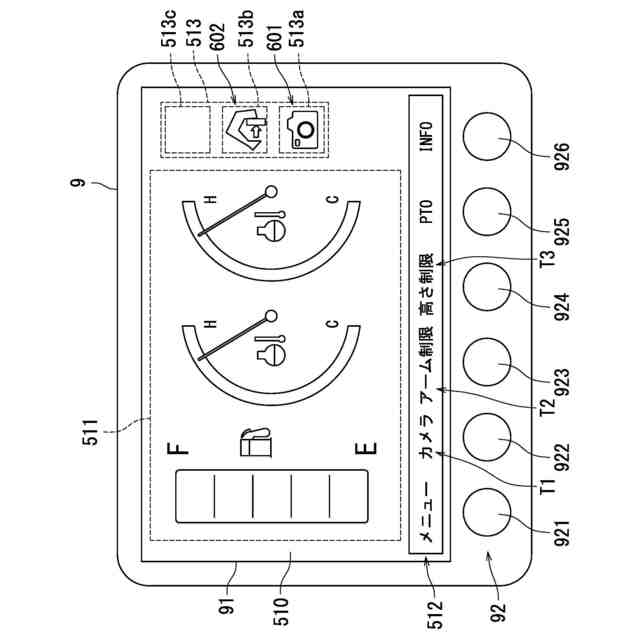
作業機械における表示装置を示す図である。
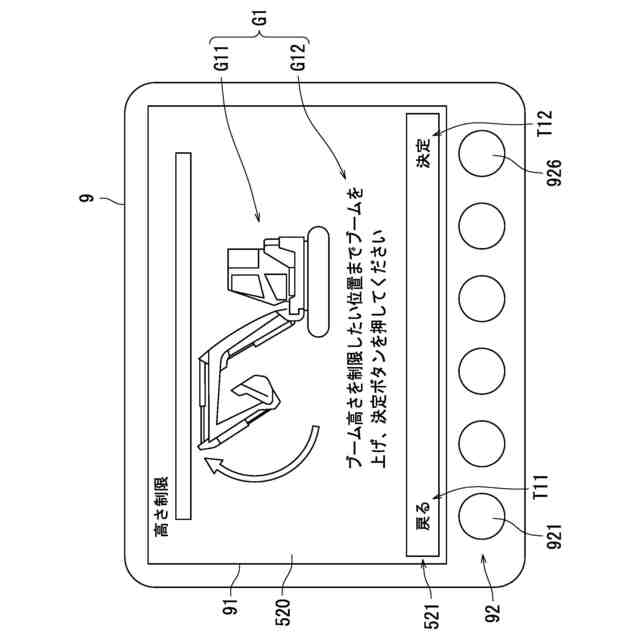
ガイダンス画面を表示している表示装置を示す図である。
ブーム高さ制限機能を設定する指示を操作部が受け付けた後の表示装置を示す図である。
表示部に第1学習用マーク画像を表示させてから一定期間が経過した後の表示装置を示す図である。
ホーム画面に第1学習用マーク画像を重畳させてから一定期間が経過した後の表示装置を示す図である。
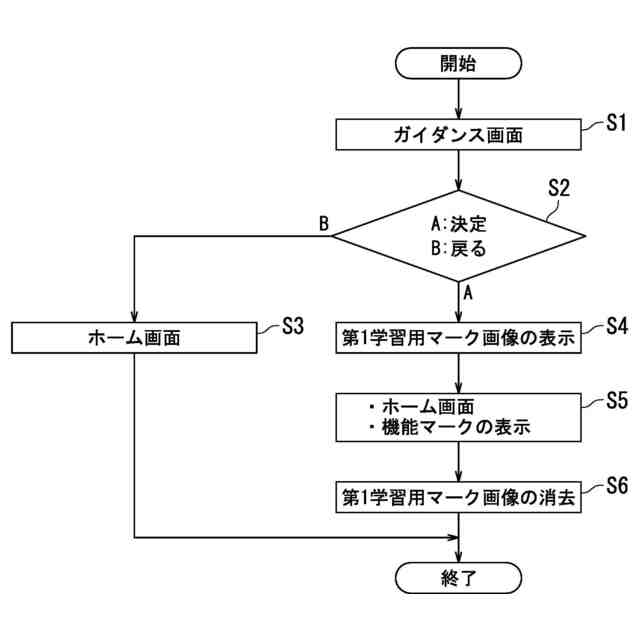
作業機械において第2コントローラが実行する処理を示すフローチャートである。
表示部に第1学習用マーク画像を表示させてから一定期間が経過した後の表示装置の他の例を示す図である。
表示部に第1学習用マーク画像を表示させてから一定期間が経過した後の表示装置の他の例を示す図である。
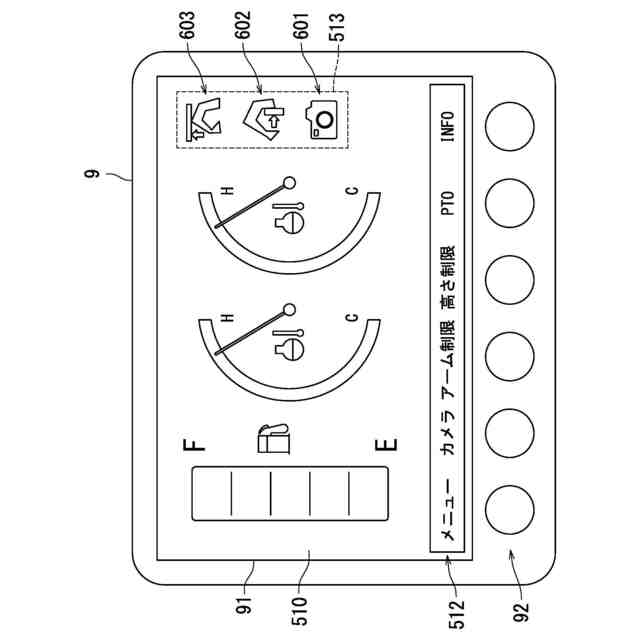
本発明の実施形態2に係る作業機械における表示装置を示す図である。
ブーム高さ制限機能を設定する指示を操作部が受け付けた後の表示装置を示す図である。
作業機械において第2コントローラが実行する処理を示すフローチャートである。
本発明の実施形態3に係る作業機械における表示装置を示す図である。
ブーム高さ制限機能を無効にする指示を操作部が受け付けた後の表示装置を示す図である。
作業機械において第2コントローラが実行する処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、図面(図1~図17)を参照して本発明の作業機械に係る実施形態を説明する。ただし、本発明は以下の実施形態に限定されない。なお、説明が重複する箇所については、適宜説明を省略する場合がある。また、図中、同一又は相当部分については同一の参照符号を付して説明を繰り返さない。
【0010】
[実施形態1]
以下、図1~図11を参照して本発明の実施形態1を説明する。まず、図1~図3を参照して本実施形態の作業機械1を説明する。図1は、本実施形態の作業機械1の側面図である。図1に示すように、本実施形態の作業機械1はバックホーである。バックホーは、建設機械の一種である。本実施形態の作業機械1は、機械本体2と、ブーム3と、アーム4と、バケット5と、走行装置7とを備える。本実施形態の作業機械1は、ブーム用アクチュエータ30と、アーム用アクチュエータ40と、アタッチメント用アクチュエータ50とを更に備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社高橋監理
不同沈下修正機
13日前
個人
潜水式土運船と土砂降ろし方法
13日前
大和クレス株式会社
斜樋管保護部材
21日前
カナデビア株式会社
サクション基礎
13日前
ジーネットワーク株式会社
二重管CFT合成杭
28日前
株式会社オーイケ
擁壁および基礎ブロック
13日前
埼玉八栄工業株式会社
地盤撹拌装置
6日前
五洋建設株式会社
鋼管矢板の接合方法
27日前
株式会社竹内製作所
作業用車両
3日前
株式会社竹内製作所
作業用車両
3日前
日本国土開発株式会社
堆積物移動装置
20日前
株式会社技研製作所
杭の定着方法
28日前
コベルコ建機株式会社
作業機械
20日前
株式会社大林組
ベントナイト砕石の締固め管理方法
28日前
日本車輌製造株式会社
杭打機の制御システム
20日前
株式会社小松製作所
作業機械
20日前
株式会社本久
砂防ソイルセメント材の品質管理方法
3日前
アロン化成株式会社
排水設備用蓋
13日前
株式会社鴻池組
地盤締固め工法
21日前
株式会社ササキコーポレーション
除去作業機
今日
株式会社大林組
施工支援システム及び施工支援方法
28日前
株式会社竹中土木
堤体補強構造
28日前
株式会社ササキコーポレーション
除去作業機
今日
前田工繊株式会社
洗掘防止ユニットの撤去方法
28日前
株式会社大林組
構真柱の構築方法
20日前
スエヒロシステム株式会社
小型アンカ一体型ライナー
28日前
株式会社大林組
地中連続壁の構築方法及び地中連続壁
7日前
コベルコ建機株式会社
作業機械走行システム
27日前
株式会社ヤマックス
擁壁構造体と重力式擁壁構造体の築造方法
7日前
株式会社サン・エンジニア
地盤改良機
21日前
大和ハウス工業株式会社
杭引き抜き治具
13日前
コベルコ建機株式会社
制御装置、建設機械、及びプログラム
27日前
西武ポリマ化成株式会社
ハイブリッドケーソンの底版部構造
27日前
ヤンマーホールディングス株式会社
作業機械
20日前
ヤンマーホールディングス株式会社
作業機械
20日前
JFEシビル株式会社
柱と杭との接合構造
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ