TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025119
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023129608
出願日
2023-08-08
発明の名称
手術器具
出願人
株式会社メディカロイド
代理人
個人
,
個人
主分類
A61B
34/37 20160101AFI20250214BHJP(医学または獣医学;衛生学)
要約
【課題】ジョイントの組付けを容易に正確に行うことができるとともに、不具合が生じた場合でも原因の特定が容易になり品質管理を適切に行うことが可能な手術器具を提供する。
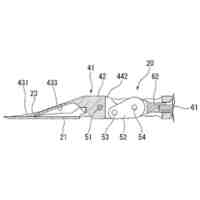
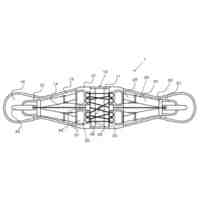
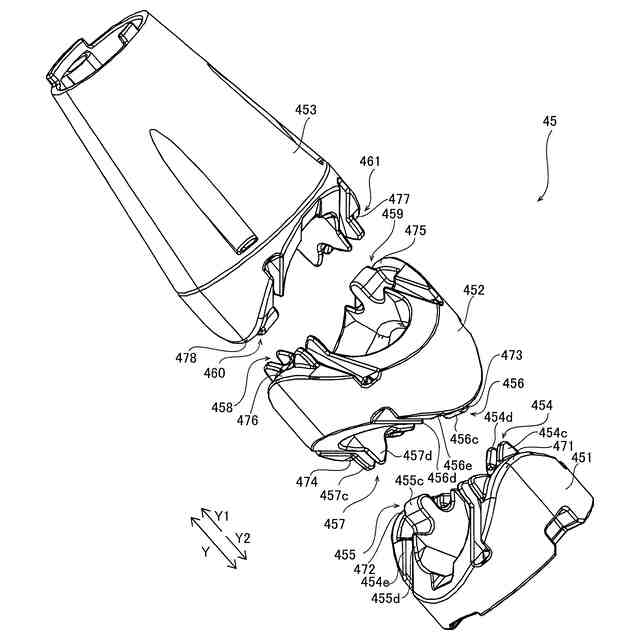
【解決手段】手術器具40aは、ロボットアーム21aに取り付けられるハウジング41と、ハウジング41に接続されるシャフト42と、シャフト42の遠位端に接続される関節運動可能なリストジョイント45と、リストジョイント45の遠位端に接続されるエンドエフェクタ43と、を備える。リストジョイント45は、第1のジョイント部品451と、第1のジョイント部品451に遠位側で隣接し、第1のジョイント部品451に対して回動する第2のジョイント部品452とを含む。第1のジョイント部品451の第1の噛合部454と第2の噛合部455とは互いに異なる形状を有し、第2のジョイント部品452の第3の噛合部456と第4の噛合部457とは互いに異なる形状を有する。
【選択図】図18
特許請求の範囲
【請求項1】
ロボットアームに取り付けられるハウジングと、
前記ハウジングに近位端が接続されるシャフトと、
前記シャフトの遠位端に接続される関節運動可能なジョイント部と、
前記ジョイント部の遠位端に接続されるエンドエフェクタと、を備え、
前記ジョイント部は、第1のジョイント部品と、前記第1のジョイント部品に遠位側で隣接し、前記第1のジョイント部品に対して回動する第2のジョイント部品とを含み、
前記第1のジョイント部品は、第1の噛合部と、前記第1の噛合部に対し前記シャフトの長手方向と直交する径方向に対向するように配置された第2の噛合部とを有し、
前記第2のジョイント部品は、前記第1の噛合部と噛合する第3の噛合部と、前記第3の噛合部に対し前記径方向に対向するように配置され、前記第2の噛合部と噛合する第4の噛合部とを有し、
前記第1の噛合部と前記第2の噛合部とは互いに異なる形状を有し、
前記第3の噛合部と前記第4の噛合部とは互いに異なる形状を有する、手術器具。
続きを表示(約 1,400 文字)
【請求項2】
前記第1の噛合部と前記第4の噛合部とは互いに同一の形状を有し、
前記第2の噛合部と前記第3の噛合部とは互いに同一の形状を有する、請求項1に記載の手術器具。
【請求項3】
前記第1の噛合部は、前記第2のジョイント部品の回動方向に沿って配置された一対の第1凸部と、前記一対の第1凸部の間に配置された第1凹部とを含み、
前記第2の噛合部は、前記第2のジョイント部品の回動方向に沿って配置された一対の第2凹部と、前記一対の第2凹部の間に配置された第2凸部とを含み、
前記第3の噛合部は、前記第2のジョイント部品の回動方向に沿って配置された一対の第3凹部と、前記一対の第3凹部の間に配置された第3凸部とを含み、
前記第4の噛合部は、前記第2のジョイント部品の回動方向に沿って配置された一対の第4凸部と、前記一対の第4凸部の間に配置された第4凹部とを含む、請求項1に記載の手術器具。
【請求項4】
前記第1の噛合部、前記第2の噛合部、前記第3の噛合部および前記第4の噛合部は、前記第2のジョイント部品の回動軸線方向に見て、円弧が連結された形状、または、円弧および直線が連結された形状を有している、請求項1に記載の手術器具。
【請求項5】
前記第1のジョイント部品に対して前記第2のジョイント部品を回動させる関節運動を行うための細長要素をさらに備え、
前記第1の噛合部は、前記径方向において前記細長要素を挟み込むように分割して配置された第1部分および第2部分を有し、
前記第4の噛合部は、前記径方向において前記細長要素を挟み込むように分割して配置された第3部分および第4部分を有する、請求項1に記載の手術器具。
【請求項6】
前記第2の噛合部は、前記径方向において連続的に形成された第5部分を有し、
前記第3の噛合部は、前記径方向において連続的に形成された第6部分を有する、請求項5に記載の手術器具。
【請求項7】
前記第1のジョイント部品は、前記第1の噛合部から離間した位置に配置され、前記細長要素を通す第1貫通穴と、前記第2の噛合部から離間した位置に配置され、前記細長要素を通す第2貫通穴と、を有し、
前記第2のジョイント部品は、前記第3の噛合部から離間した位置に配置され、前記細長要素を通す第3貫通穴と、前記第4の噛合部から離間した位置に配置され、前記細長要素を通す第4貫通穴と、を有する、請求項5に記載の手術器具。
【請求項8】
前記細長要素は、前記ジョイント部における前記エンドエフェクタ側に、端部が固定されている、請求項5に記載の手術器具。
【請求項9】
前記ジョイント部は、前記第2のジョイント部品に遠位側で隣接し、前記第2のジョイント部品に対して回動する第3のジョイント部品を含み、
前記第2のジョイント部品は、第5の噛合部と、前記第5の噛合部に対し前記径方向に対向するように配置された第6の噛合部とを有し、
前記第3のジョイント部品は、前記第5の噛合部と噛合する第7の噛合部と、前記第7の噛合部に対し前記径方向に対向するように配置され、前記第6の噛合部と噛合する第8の噛合部とを有し、
前記第5の噛合部と前記第6の噛合部とは互いに異なる形状を有し、
前記第7の噛合部と前記第8の噛合部とは互いに異なる形状を有する、請求項1に記載の手術器具。
発明の詳細な説明
【技術分野】
【0001】
この発明は、手術器具に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
従来、ロボットアームに取り付けられる手術器具が知られている。たとえば、特許文献1には、シャフトと、シャフトの遠位端に配置されたリストと、リストから延びるエンドエフェクタとを備える手術器具が開示されている。この特許文献1の手術器具のリストには、関節運動可能なリストジョイントが設けられている。リストジョイントは、互いに噛み合う一対のジョイント特徴(ジョイント構造)を各々有する第1ディスクおよび第2ディスクを含んでいる。また、第1ディスクに設けられた一対のジョイント構造は、第2ディスクに設けられた一対のジョイント構造と噛合している。また、第1ディスクに設けられた一対のジョイント構造は互いに同一形状を有するとともに、第2ディスクに設けられた一対のジョイント構造は互いに同一形状を有している。
【先行技術文献】
【特許文献】
【0003】
特許第6961733号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の手術器具は、第1ディスクに設けられた一対のジョイント構造は互いに同一形状を有するとともに、第2ディスクに設けられた一対のジョイント構造は互いに同一形状を有している。このため、第1ディスクに設けられた一対のジョイント構造と、第2ディスクに設けられた一対のジョイント構造とを噛み合わせて第1ディスクおよび第2ディスクを組付ける際に、第1ディスクに設けられた一対のジョイント構造の各々が、第2ディスクに設けられた一対のジョイント構造のいずれとも噛み合わせ可能である。このため、第1ディスクおよび第2ディスクの組付けの向きが一様に定まらないため、不具合が生じるとその原因の特定に時間を要してしまうという問題点がある。
【0005】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、ジョイントの組付けを容易に正確に行うことができるとともに、不具合が生じた場合でも原因の特定が容易になり品質管理を適切に行うことが可能な手術器具を提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、この発明の一の局面による手術器具は、ロボットアームに取り付けられるハウジングと、ハウジングに近位端が接続されるシャフトと、シャフトの遠位端に接続される関節運動可能なジョイント部と、ジョイント部の遠位端に接続されるエンドエフェクタと、を備え、ジョイント部は、第1のジョイント部品と、第1のジョイント部品に遠位側で隣接し、第1のジョイント部品に対して回動する第2のジョイント部品とを含み、第1のジョイント部品は、第1の噛合部と、第1の噛合部に対しシャフトの長手方向と直交する径方向に対向するように配置された第2の噛合部とを有し、第2のジョイント部品は、第1の噛合部と噛合する第3の噛合部と、第3の噛合部に対し径方向に対向するように配置され、第2の噛合部と噛合する第4の噛合部とを有し、第1の噛合部と第2の噛合部とは互いに異なる形状を有し、第3の噛合部と第4の噛合部とは互いに異なる形状を有する。
【0007】
この発明の一の局面による外科手術システムでは、上記のように、第1のジョイント部品の第1の噛合部と第2の噛合部とは互いに異なる形状を有し、第2のジョイント部品の第3の噛合部と第4の噛合部とは互いに異なる形状を有する。これにより、第1のジョイント部品の第1の噛合部と第2のジョイント部品の第4の噛合部とを、噛み合いにくくすることができるとともに、第1のジョイント部品の第2の噛合部と第2のジョイント部品の第3の噛合部とを、噛み合いにくくすることができる。これにより、第1のジョイント部品と第2のジョイント部品とを組み付ける際に、第1の噛合部および第3の噛合部を正しく噛み合わせるとともに、第2の噛合部および第4の噛合部を正しく噛み合わせることができる。その結果、第1のジョイント部品および第2のジョイント部品の組付けの方向が誤った方向になるのを抑制することができるので、第1のジョイント部品および第2のジョイント部品の組付けを容易に正確に行うことができる。また、ジョイントにおいて不具合が生じたとしても、噛合部の噛み合いが互いに異なるので、その原因の特定する時間が長くなるのを抑制することができる。これにより、不具合が生じた場合でも原因の特定を容易に行うことができる。その結果、ジョイントの組付けを容易に正確に行うことができるとともに、不具合が生じた場合でも原因の特定が容易になり手術器具の品質管理を適切に行うことができる。
【発明の効果】
【0008】
本発明によれば、ジョイントの組付けを容易に正確に行うことができるとともに、不具合が生じた場合でも原因の特定が容易になり手術器具の品質管理を適切に行うことができる。
【図面の簡単な説明】
【0009】
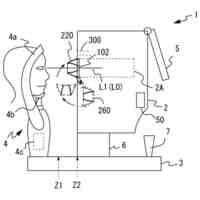
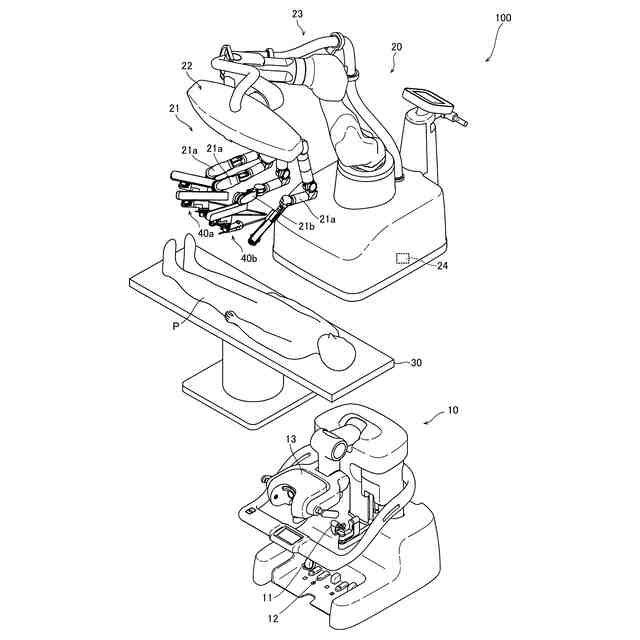
一実施形態によるロボット手術システムの構成を示す図である。
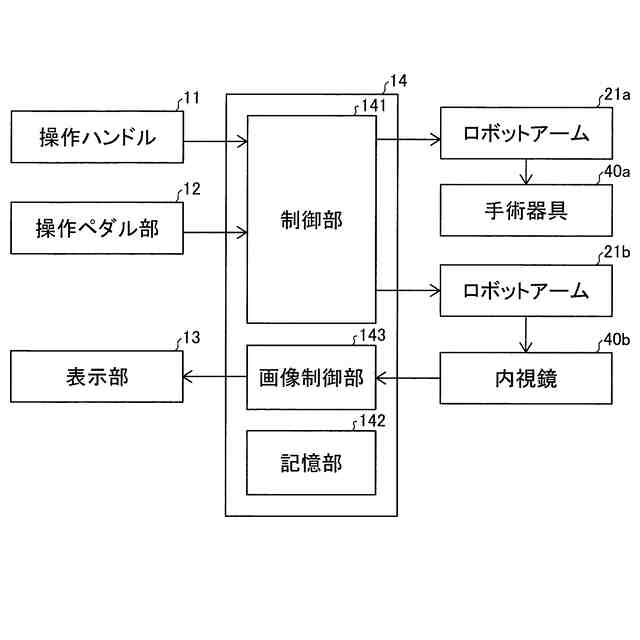
一実施形態によるロボット手術システムの制御的な構成を示したブロック図である。
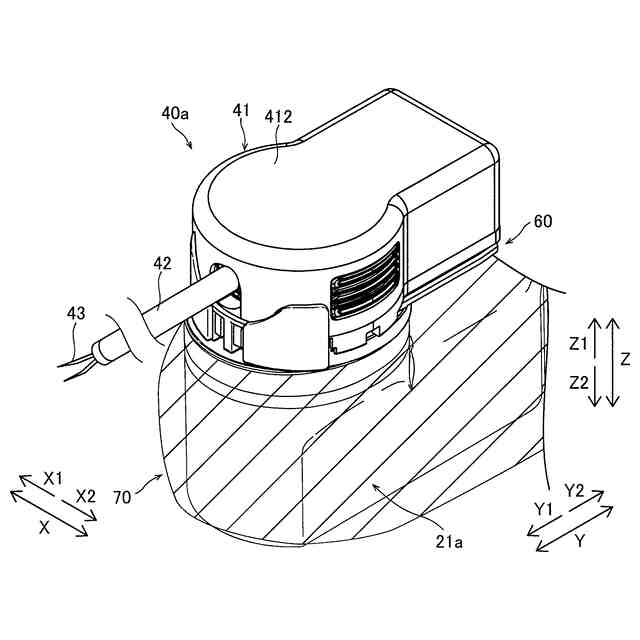
一実施形態によるロボットアームにアダプタを介して手術器具が取り付けられた状態を示した斜視図である。
一実施形態によるロボットアームにアダプタを介して手術器具が取り付けられる状態を示した分解斜視図である。
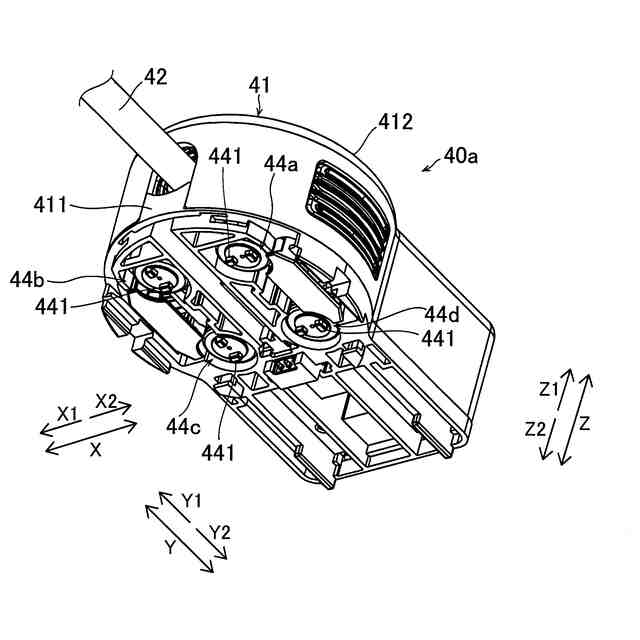
一実施形態による手術器具を下方から見た斜視図である。
一実施形態による手術器具を示した平面図である。
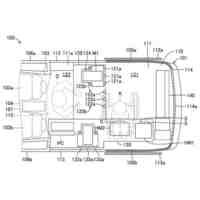
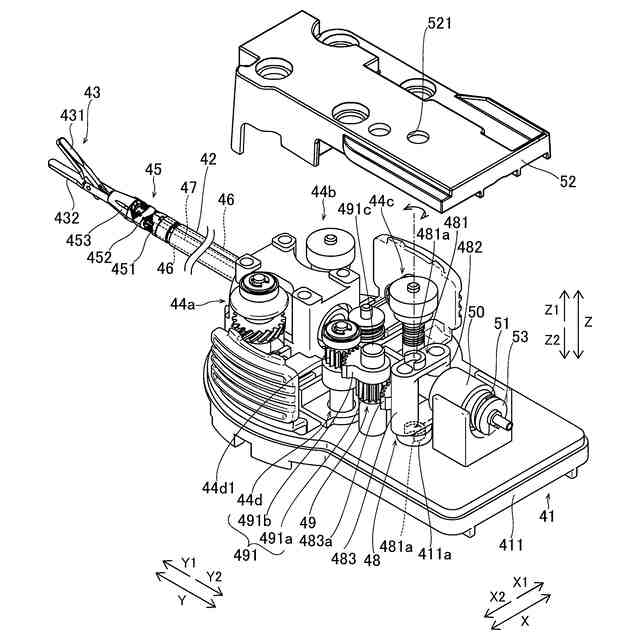
一実施形態による手術器具の蓋部を取り外した状態を示した斜視図である。
一実施形態による手術器具の蓋部を取り外した状態を示した平面図である。
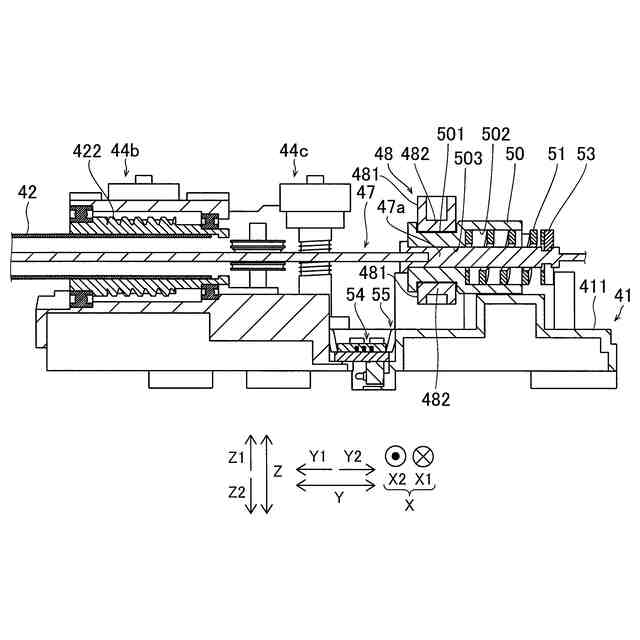
一実施形態による手術器具の蓋部を取り外した状態を示した断面図である。
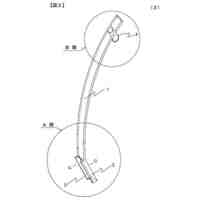
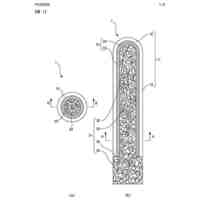
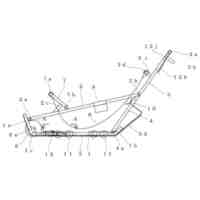
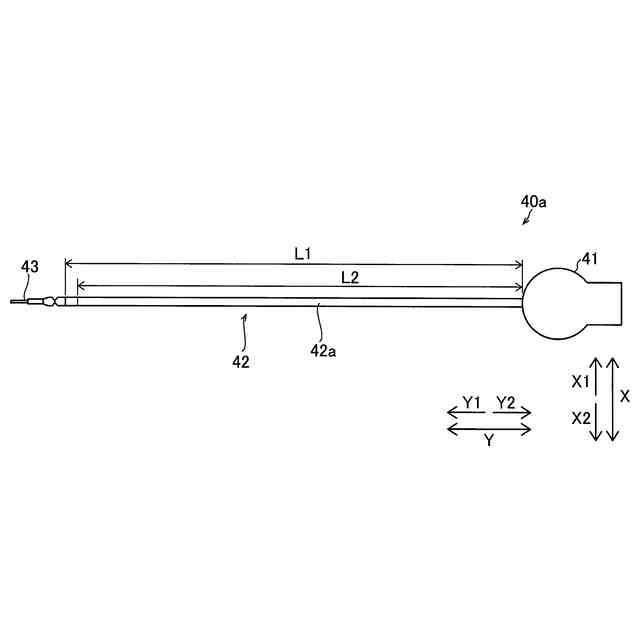
一実施形態によるエンドエフェクタ、リストジョイントおよびシャフトを示した側面図である。
一実施形態によるエンドエフェクタ、リストジョイントおよびシャフトを示した断面図である。
図10の矢視C1-C1から視た第3のジョイント部品の横断面図である。
一実施形態によるエンドエフェクタおよびロッドを示した分解斜視図である。
一実施形態による手術器具のリストジョイント内のガイド部を示した斜視図である。
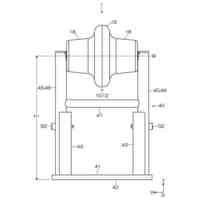
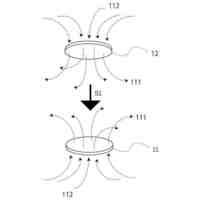
一実施形態によるメモリ基板および固定部を示した斜視図である。
一実施形態によるメモリ基板および固定部を示した断面図である。
一実施形態による手術器具のリストジョイントを示した斜視図である。
一実施形態による手術器具のリストジョイントを示した分解斜視図である。
一実施形態による手術器具のリストジョイントの第1および第4の噛合部を示した断面図である。
一実施形態による手術器具のリストジョイントの第2および第3の噛合部を示した断面図である。
一実施形態による手術器具のリストジョイントの第1および第4の噛合部を示した拡大図である。
一実施形態による手術器具のリストジョイントの第2および第3の噛合部を示した拡大図である。
一実施形態による手術器具の回動していない状態のリストジョイントを示した図である。
一実施形態による手術器具の角度θ1回動した状態のリストジョイントを示した図である。
一実施形態による手術器具の角度θ2回動した状態のリストジョイントを示した図である。
一実施形態による手術器具の角度θ3回動した状態のリストジョイントを示した図である。
【発明を実施するための形態】
【0010】
以下、本発明を具体化した本発明の実施形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康器具
22日前
個人
鼾防止用具
18日前
個人
歯の掃除具
4か月前
個人
歯茎みが品
1か月前
個人
脈波測定方法
18日前
個人
乗馬テラピー
4か月前
個人
マッサージ機
1か月前
個人
脈波測定方法
25日前
個人
塗り薬塗り具
3か月前
個人
身体牽引装置
4か月前
個人
導電香
1か月前
個人
健康器具
3か月前
個人
片足歩行支援具
1か月前
個人
クリップ
1か月前
個人
染毛方法
3か月前
個人
収納容器
2か月前
個人
発熱器具
4か月前
個人
動体視力強化装置
4か月前
個人
眼科診療車
2か月前
個人
磁器治療器
4か月前
個人
口内洗浄具
25日前
株式会社 MTG
浴用剤
1か月前
株式会社コーセー
化粧料
1か月前
東レ株式会社
下肢着用具
4か月前
株式会社ナカニシ
生検針
4か月前
株式会社結心
手袋
4日前
東レ株式会社
吸収制御剤
3か月前
個人
除菌システム
1か月前
個人
避難困難者救出台車
2か月前
個人
血管硬化度算出方法
5か月前
株式会社コーセー
美爪料
1か月前
株式会社ニデック
眼科装置
5か月前
株式会社ファンケル
化粧料
5か月前
個人
腰用サポーター
18日前
個人
立位姿勢支持具
3か月前
株式会社ファンケル
化粧料
3か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ