TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025117
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023129598
出願日
2023-08-08
発明の名称
手術器具
出願人
株式会社メディカロイド
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20250214BHJP(医学または獣医学;衛生学)
要約
【課題】4つの駆動軸で、シャフトをロール回転、エンドエフェクタをピッチ・ヨー関節運動可能で、かつ、エンドエフェクタを作動するための細長要素をシャフトの長手方向に移動させることが可能な手術器具を提供する。
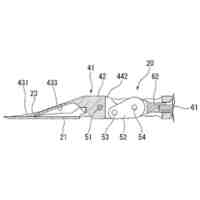
【解決手段】この手術器具40aは、シャフト42をロール回転させるための第1駆動軸44aと、第1関節45aをピッチ関節運動させるとともに、第2関節45bをヨー関節運動させるための第2駆動軸44bおよび第3駆動軸44cと、ロッド47を長手方向に移動させるための第4の駆動軸44dとを有する。この手術器具40aは、第4駆動軸44dからの駆動力により軸心周りに回転する軸部481aと、軸部481aに設けられたアーム481と、アーム481に設けられ、ロッド47に係合する係合部482と、を備えるレバー48を備える。
【選択図】図6
特許請求の範囲
【請求項1】
ロボットアームに取り付けられるベースと、前記ベースを覆う蓋部を有するハウジングと、
前記ベースに近位端が接続されるシャフトと、
前記シャフトの遠位端側に接続され、前記シャフトの長手方向と直交する第1回転軸周りにピッチ関節運動可能な第1関節および前記長手方向および前記第1回転軸に直交する第2回転軸周りにヨー関節運動可能な第2関節を含むリストジョイントと、
前記リストジョイントの遠位端に接続されるエンドエフェクタと、
前記シャフトの長手方向に延びるように設けられ、遠位端が前記エンドエフェクタに接続される細長要素と、
前記ベースに設けられ、前記ロボットアームに設けられたモータからの駆動力により回転駆動する少なくとも4つの駆動軸と、
前記細長要素を前記長手方向に移動させるレバーと、を備え、
前記少なくとも4つの駆動軸は、前記シャフトを前記長手方向の軸線周りにロール回転させるための第1駆動軸と、前記第1関節を前記第1回転軸周りにピッチ関節運動させるとともに、前記第2関節を前記第2回転軸周りにヨー関節運動させるための第2駆動軸および第3駆動軸と、前記細長要素を前記長手方向に移動させるための第4駆動軸と、を備え、
前記レバーは、前記第4駆動軸からの駆動力により軸心周りに回転する軸部と、前記軸部に設けられたアームと、前記アームに設けられ、前記細長要素に係合する係合部と、を備える、手術器具。
続きを表示(約 1,000 文字)
【請求項2】
前記第4駆動軸と前記レバーとの間に設けられ、前記第4駆動軸から前記レバーに駆動力を伝達する駆動力伝達部をさらに備える、請求項1に記載の手術器具。
【請求項3】
前記駆動力伝達部は、スパーギアとセクターギアとを含むギア列を有し、前記ギア列によって、前記第4駆動軸から前記レバーに駆動力を伝達する、請求項2に記載の手術器具。
【請求項4】
前記駆動力伝達部は、前記第4駆動軸の回転を減速して前記レバーに伝達する、請求項2に記載の手術器具。
【請求項5】
前記軸部の軸心は、前記長手方向と直交する方向において、前記係合部と前記第4駆動軸との間に配置されている、請求項1に記載の手術器具。
【請求項6】
前記アームは、第1アームと、前記第1アームに対向するように設けられた第2アームと、を含み、前記係合部は、前記第1アームに設けられた第1係合部と、前記第2アームに設けられた第2係合部と、を含み、
前記第1係合部は、一方側から前記細長要素に係合し、
前記第2係合部は、他方側から前記細長要素に係合する、請求項1に記載の手術器具。
【請求項7】
前記細長要素を保持する保持部材をさらに備え、
前記第1係合部は、一方側から前記保持部材を介して前記細長要素に係合し、
前記第2係合部は、他方側から前記保持部材を介して前記細長要素に係合する、請求項6に記載の手術器具。
【請求項8】
前記エンドエフェクタは、第1ジョーと、第2ジョーとを有し、
前記第1ジョーは、前記第2ジョーに回転可能に支持される支持軸と、前記細長要素の遠位端に接続される接続部とを有し、前記細長要素の前記長手方向の移動により前記支持軸の軸心周りに回転する、請求項1に記載の手術器具。
【請求項9】
前記細長要素を保持する保持部材と、
前記保持部材を前記長手方向の遠位端側に向かって付勢するばね部材と、をさらに備え、
前記係合部は、前記保持部材を介して前記細長要素に係合し、
前記係合部により前記保持部材を前記長手方向の近位端側に向かって押した際の前記ばね部材の反力により前記エンドエフェクタの把持力を印加する、請求項1に記載の手術器具。
【請求項10】
前記細長要素は、ロッドである、請求項1に記載の手術器具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、手術器具に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
従来、駆動軸を備える手術器具が知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、駆動軸と、駆動軸の固定されたディスクと、ディスクに設けられた偏心カムピンと、偏心カムピンに係合する駆動バーと、駆動バーのピボットとなるピボット駆動軸と、駆動バーのピボット駆動軸周りの回動により、シャフトの長手方向に前後運動するコアロッドと、コアロッドの前後運動により開閉するブレードとを備える、手術器具が開示されている。上記特許文献1に開示された手術器具では、ベースから垂直に延びる4つの駆動軸のうち、2つの駆動軸をピボット軸として利用してコアロッドを前後運動させてエンドエフェクタを駆動させるとともに、1つの駆動軸を利用してシャフトを回転させる。
【先行技術文献】
【特許文献】
【0004】
米国特許7306597号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1では、2つの駆動軸をピボット軸として利用してコアロッドを前後運動させてエンドエフェクタを駆動させているため、エンドエフェクタをピッチ・ヨー関節運動させるための駆動軸の数が不足しており、エンドエフェクタをピッチ・ヨー関節運動させることが困難であるという不都合がある。このため、4つの駆動軸で、シャフトをロール回転、エンドエフェクタをピッチ・ヨー関節運動可能で、かつ、エンドエフェクタを作動するためのロッド(細長要素)をシャフトの長手方向に移動させることが困難であるという問題点がある。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、4つの駆動軸で、シャフトをロール回転、エンドエフェクタをピッチ・ヨー関節運動可能で、かつ、エンドエフェクタを作動するための細長要素をシャフトの長手方向に移動させることが可能な手術器具を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、この発明の一の局面による手術器具は、ロボットアームに取り付けられるベースと、ベースを覆う蓋部を有するハウジングと、ベースに近位端が接続されるシャフトと、シャフトの遠位端側に接続され、シャフトの長手方向と直交する第1回転軸周りにピッチ関節運動可能な第1関節および長手方向および第1回転軸に直交する第2回転軸周りにヨー関節運動可能な第2関節を含むリストジョイントと、リストジョイントの遠位端に接続されるエンドエフェクタと、シャフトの長手方向に延びるように設けられ、遠位端がエンドエフェクタに接続される細長要素と、ベースに設けられ、ロボットアームに設けられたモータからの駆動力により回転駆動する少なくとも4つの駆動軸と、細長要素を長手方向に移動させるレバーと、を備え、少なくとも4つの駆動軸は、シャフトを長手方向の軸線周りにロール回転させるための第1駆動軸と、第1関節を第1回転軸周りにピッチ関節運動させるとともに、第2関節を第2回転軸周りにヨー関節運動させるための第2駆動軸および第3駆動軸と、細長要素を長手方向に移動させるための第4駆動軸と、を備え、レバーは、第4駆動軸からの駆動力により軸心周りに回転する軸部と、軸部に設けられたアームと、アームに設けられ、細長要素に係合する係合部と、を備える。
【0008】
この発明の一の局面による手術器具では、上記のように、レバーは、第4駆動軸からの駆動力により軸心周りに回転する軸部と、軸部に設けられたアームと、アームに設けられ、細長要素に係合する係合部とを備える。これにより、細長要素を長手方向に移動させるレバー自身が備える軸部をレバーの回転軸としているため、駆動軸を回転軸として利用する必要がない。その結果、駆動軸を1つのみ用いて細長要素をシャフトの長手方向に移動させ、エンドエフェクタを作動することができる。その結果、4つの駆動軸で、シャフトをロール回転、エンドエフェクタをピッチ・ヨー関節運動可能で、かつ、エンドエフェクタを作動するための細長要素をシャフトの長手方向に移動させることが可能な手術器具を提供することができる。
【発明の効果】
【0009】
本発明によれば、上記のように、4つの駆動軸で、シャフトをロール回転、エンドエフェクタをピッチ・ヨー関節運動可能で、かつ、エンドエフェクタを作動するための細長要素をシャフトの長手方向に移動させることができる。
【図面の簡単な説明】
【0010】
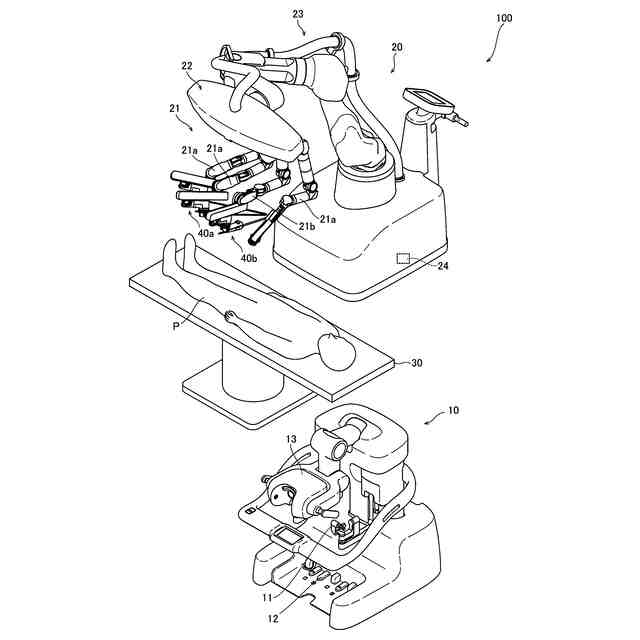
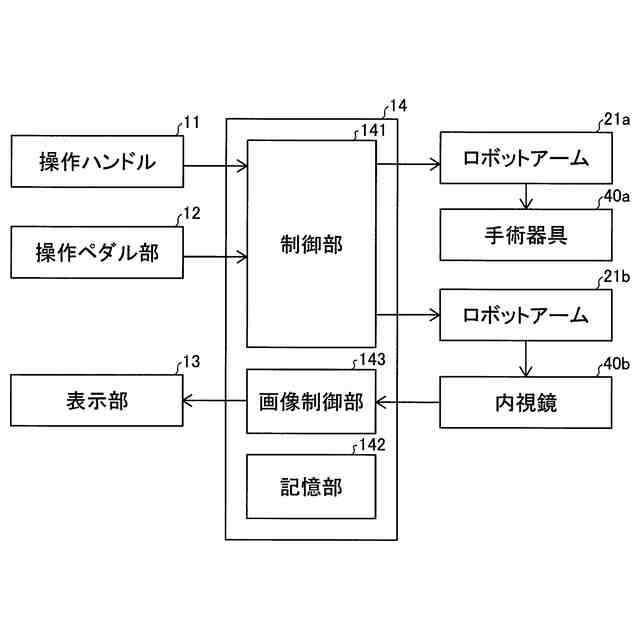
一実施形態によるロボット手術システムの構成を示す図である。
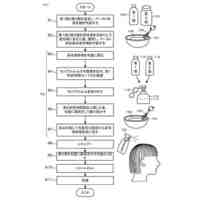
一実施形態によるロボット手術システムの制御的な構成を示したブロック図である。
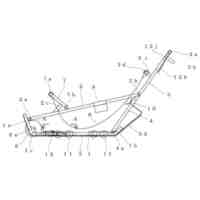
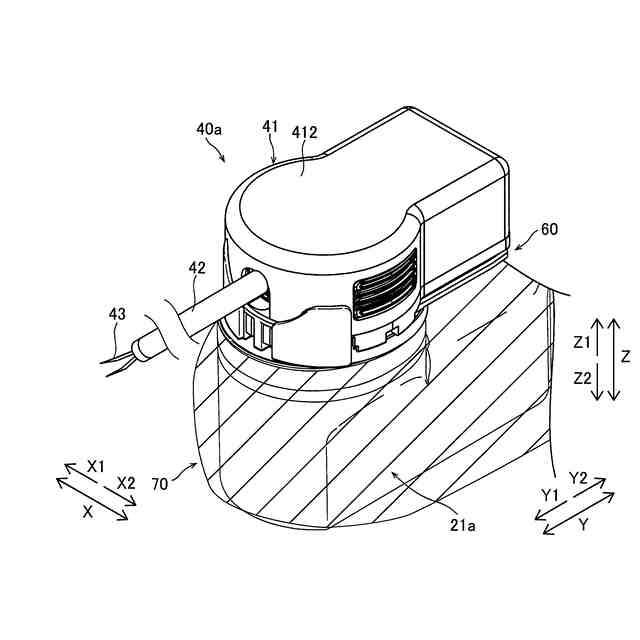
一実施形態によるロボットアームにアダプタを介して手術器具が取り付けられた状態を示した斜視図である。
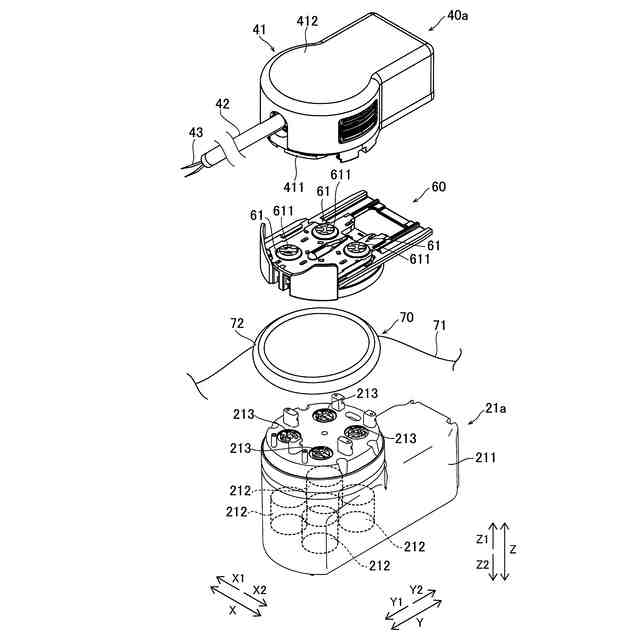
一実施形態によるロボットアームにアダプタを介して手術器具が取り付けられる状態を示した分解斜視図である。
一実施形態による手術器具を下方から見た斜視図である。
一実施形態による手術器具を示した平面図である。
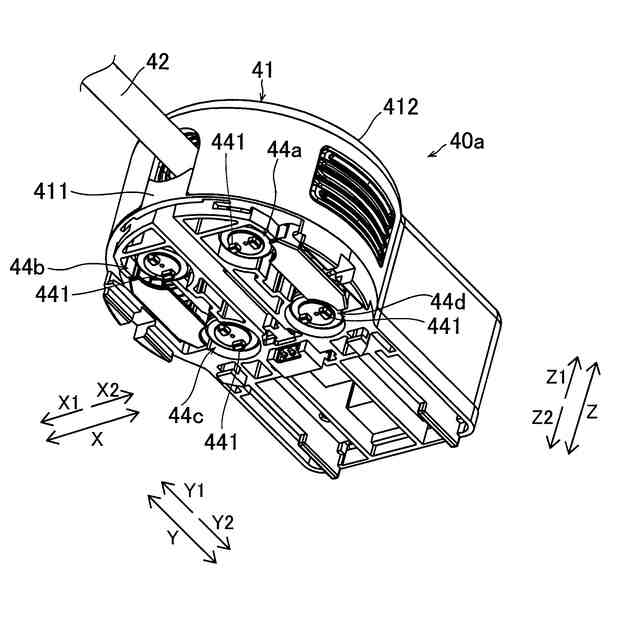
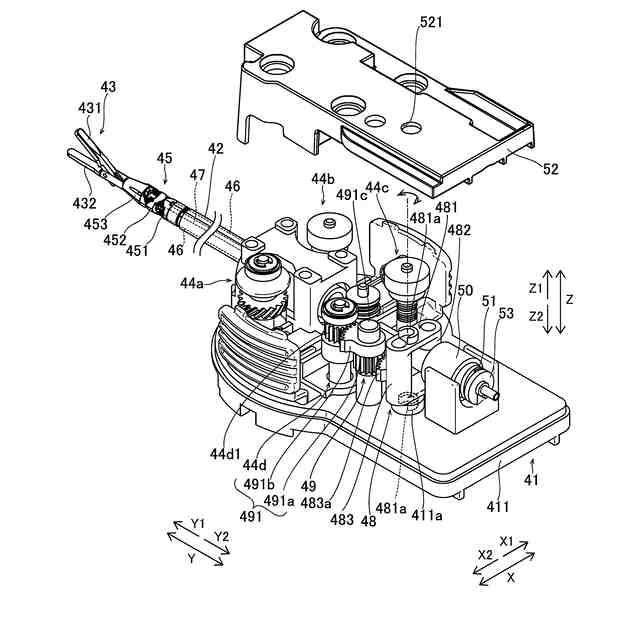
一実施形態による手術器具の蓋部を取り外した状態を示した斜視図である。
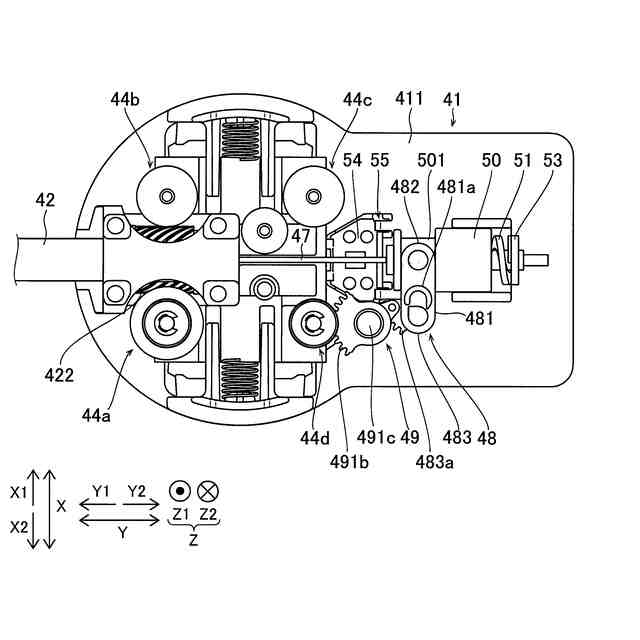
一実施形態による手術器具の蓋部を取り外した状態を示した平面図である。
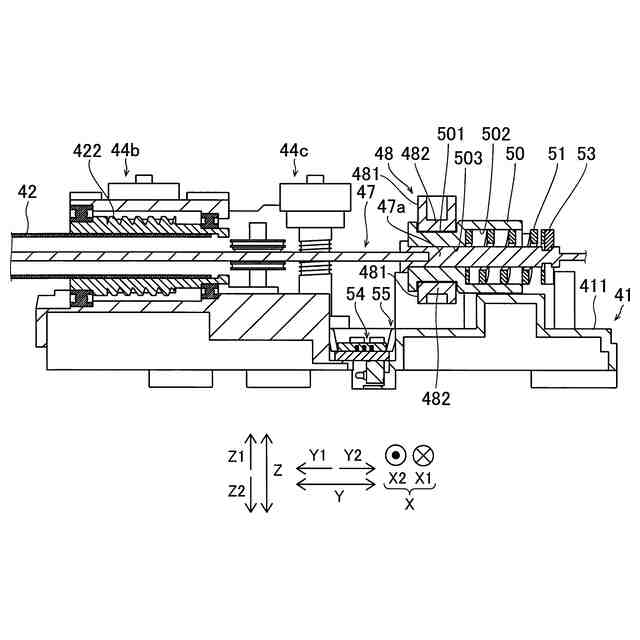
一実施形態による手術器具の蓋部を取り外した状態を示した断面図である。
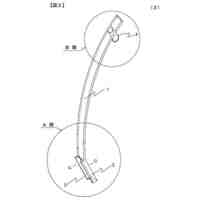
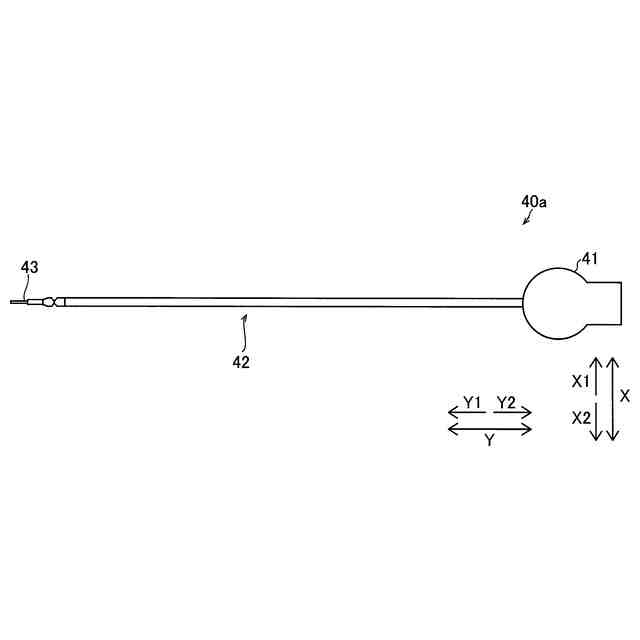
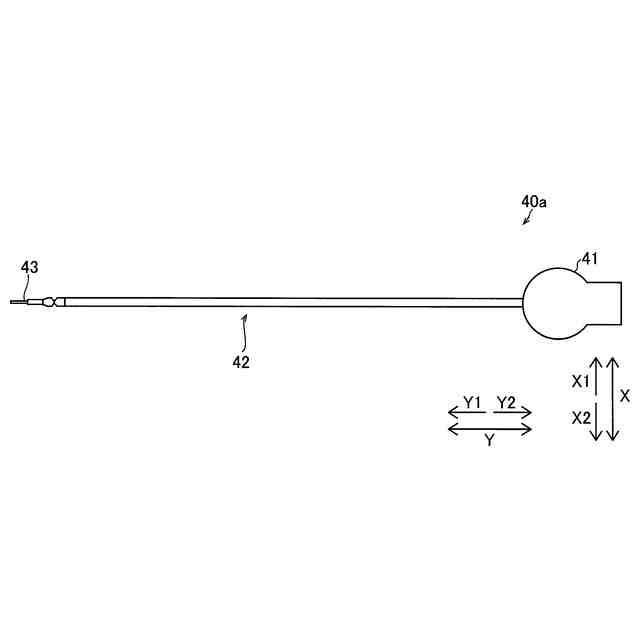
一実施形態によるエンドエフェクタ、リストジョイントおよびシャフトを示した側面図である。
一実施形態によるエンドエフェクタ、リストジョイントおよびシャフトを示した断面図である。
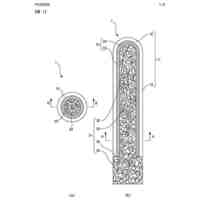
図10の矢視C1-C1から視た第3のジョイント部品の横断面図である。
一実施形態によるエンドエフェクタおよびロッドを示した分解斜視図である。
一実施形態による手術器具のリストジョイント内のガイド部を示した斜視図である。
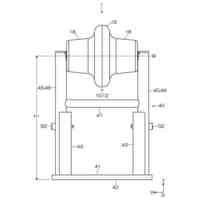
一実施形態によるメモリ基板および固定部を示した斜視図である。
一実施形態によるメモリ基板および固定部を示した断面図である。
一実施形態による手術器具のリストジョイントを示した斜視図である。
一実施形態による手術器具のリストジョイントを示した分解斜視図である。
一実施形態による手術器具のリストジョイントの第1および第4の噛合部を示した断面図である。
一実施形態による手術器具のリストジョイントの第2および第3の噛合部を示した断面図である。
一実施形態による手術器具のリストジョイントの第1および第4の噛合部を示した拡大図である。
一実施形態による手術器具のリストジョイントの第2および第3の噛合部を示した拡大図である。
一実施形態による手術器具の回動していない状態のリストジョイントを示した図である。
一実施形態による手術器具の角度θ1回動した状態のリストジョイントを示した図である。
一実施形態による手術器具の角度θ2回動した状態のリストジョイントを示した図である。
一実施形態による手術器具の角度θ3回動した状態のリストジョイントを示した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康器具
22日前
個人
歯茎みが品
1か月前
個人
歯の掃除具
4か月前
個人
鼾防止用具
18日前
個人
塗り薬塗り具
3か月前
個人
導電香
1か月前
個人
脈波測定方法
18日前
個人
マッサージ機
1か月前
個人
身体牽引装置
4か月前
個人
乗馬テラピー
4か月前
個人
脈波測定方法
25日前
個人
健康器具
3か月前
個人
発熱器具
4か月前
個人
染毛方法
3か月前
個人
クリップ
1か月前
個人
片足歩行支援具
1か月前
個人
収納容器
2か月前
個人
動体視力強化装置
4か月前
個人
眼科診療車
2か月前
個人
口内洗浄具
25日前
個人
磁器治療器
4か月前
東レ株式会社
吸収制御剤
3か月前
株式会社コーセー
化粧料
1か月前
株式会社コーセー
美爪料
1か月前
東レ株式会社
下肢着用具
4か月前
株式会社結心
手袋
4日前
株式会社ナカニシ
生検針
4か月前
個人
避難困難者救出台車
2か月前
個人
除菌システム
1か月前
株式会社 MTG
浴用剤
1か月前
個人
血管硬化度算出方法
5か月前
個人
Dr.なかまつよい耳
3か月前
株式会社ファンケル
化粧料
5か月前
個人
立位姿勢支持具
3か月前
株式会社ニデック
眼科装置
4か月前
株式会社ファンケル
化粧料
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ