TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025022509
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023127158
出願日
2023-08-03
発明の名称
揺動型歯車機構、減速機及びロボットアーム
出願人
キヤノン株式会社
代理人
個人
主分類
F16H
1/32 20060101AFI20250206BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】ギアの剛性が下がらないようにして、回転伝達精度の低下を防ぐ。
【解決手段】揺動型歯車機構12は、回転可能な第1の軸31と、第1の軸31に対して傾斜して接続し、第1の軸31の回転が伝達される傾斜軸32と、傾斜軸32を挟んで第1の軸31と反対側で、第1の軸31と同軸に配置される回転可能な第2の軸33と、固定部材11に固定される第1のギア1と、第1のギア1と同軸に配置されるとともに、第2の軸33と一体回転し、かつ、第2の軸33に対して軸方向に移動可能な第2のギア2と、第1のギア1と第2のギア2との間に配置され、傾斜軸32に回転可能に設けられるとともに、第1のギア1及び第2のギア2に対して傾斜して噛合する揺動ギア3と、第2のギア2を、揺動ギア3に向かう軸方向に付勢する付勢部材63とを備え、第2のギア2のうち、少なくとも揺動ギア3に接する部分は単一の部材として構成される。
【選択図】図2
特許請求の範囲
【請求項1】
回転可能な第1の軸と、
前記第1の軸に対して傾斜して接続し、前記第1の軸の回転が伝達される傾斜軸と、
前記傾斜軸を挟んで前記第1の軸と反対側で、前記第1の軸と同軸に配置される回転可能な第2の軸と、
固定部材に固定される第1のギアと、
前記第1のギアと同軸に配置されるとともに、前記第2の軸と一体回転し、かつ、前記第2の軸に対して軸方向に移動可能な第2のギアと、
前記第1のギアと前記第2のギアとの間に配置され、前記傾斜軸に回転可能に設けられるとともに、前記第1のギア及び前記第2のギアに対して傾斜して噛合する揺動ギアと、
前記第2のギアを、前記揺動ギアに向かう軸方向に付勢する付勢部材とを備え、
前記第2のギアのうち、少なくとも前記揺動ギアに接する部分は単一の部材として構成されることを特徴とする揺動型歯車機構。
続きを表示(約 380 文字)
【請求項2】
前記第2のギアは、円形の底部及び円筒状の壁部を有する有底円筒形状であり、前記底部が前記揺動ギアと反対側に向く姿勢で、前記第2の軸と同軸に配置され、
前記壁部の前記揺動ギア側の端部に、前記揺動ギアに噛合する複数の歯が形成されることを特徴とする請求項1に記載の揺動型歯車機構。
【請求項3】
前記付勢部材は、前記底部に付勢力を与えることを特徴とする請求項2に記載の揺動型歯車機構。
【請求項4】
請求項1又は2に記載の揺動型歯車機構を用いて、入力された回転を減速して出力することを特徴とする減速機。
【請求項5】
駆動モータと、請求項1又は2に記載の揺動型歯車機構を用いて、前記駆動モータから入力された回転を減速して出力する減速機とを備えたアクチュエータが関節に取り付けられたロボットアーム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、揺動型歯車機構、揺動型歯車機構を用いた減速機、及び減速機を備えたロボットアームに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
一般に産業用ロボットにおいては、高速低トルクの駆動モータの出力が、減速機によって低速高トルクに変換され、関節駆動に使用される。産業用ロボットに用いられる減速機としては、多種の方式が実用化されており、その一種に、揺動ギアの揺動運動により大きな減速比が得られる揺動型歯車機構を用いた減速機がある。揺動歯車機構は、入力軸と同軸に設けた固定ギアに、歯数が異なる揺動ギアを入力軸によって傾斜させて噛み合わせ、入力軸の回転によって揺動運動させる。そして、入力軸と同軸に設けた出力ギアを揺動ギアに噛み合わせ、これら2組のギアの差動によって減速する。
このような揺動型歯車機構では、各部品の寸法誤差又は組立誤差によって発生するギア同士の噛合部のバックラッシや、長時間駆動による歯面の摩耗に起因する入出力軸間の回転伝達精度の低下といった課題があった。
そこで、特許文献1では、固定ギア及び出力ギアそれぞれについて、回転は規制されながら、軸方向の直進方向に移動可能な付勢ギアを設け、2つの付勢ギアの少なくとも一方が揺動ギアに噛み合うことで、バックラッシや歯面の摩耗を抑制する構成が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-161382号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、出力ギアの外周側又は内周側に付勢ギアを配置する構成になっている。換言すれば、出力ギアを半径方向に2分割し、分割した片方を付勢ギアとするような構成になっている。かかる構成では、出力ギアと付勢ギアとで揺動ギア側に突出する度合いに差が生じることがあり、いずれか片方が揺動ギアに十分に噛み合わない状態では、噛み合い歯幅が狭くなり、剛性が下がるおそれがある。固定ギアの外周側又は内周側に付勢ギアを配置する構成でも、同様のことがいえる。
【0005】
本発明は、上記のような点に鑑みてなされたものであり、揺動型歯車機構において、ギアの剛性が下がらないようにして、回転伝達精度の低下を防ぐことを目的とする。
【課題を解決するための手段】
【0006】
本発明の揺動型歯車機構は、回転可能な第1の軸と、前記第1の軸に対して傾斜して接続し、前記第1の軸の回転が伝達される傾斜軸と、前記傾斜軸を挟んで前記第1の軸と反対側で、前記第1の軸と同軸に配置される回転可能な第2の軸と、固定部材に固定される第1のギアと、前記第1のギアと同軸に配置されるとともに、前記第2の軸と一体回転し、かつ、前記第2の軸に対して軸方向に移動可能な第2のギアと、前記第1のギアと前記第2のギアとの間に配置され、前記傾斜軸に回転可能に設けられるとともに、前記第1のギア及び前記第2のギアに対して傾斜して噛合する揺動ギアと、前記第2のギアを、前記揺動ギアに向かう軸方向に付勢する付勢部材とを備え、前記第2のギアのうち、少なくとも前記揺動ギアに接する部分は単一の部材として構成されることを特徴とする。
【発明の効果】
【0007】
本発明によれば、揺動型歯車機構において、第2のギアの剛性が下がらないようにして、回転伝達精度の低下を防ぐことが可能となる。
【図面の簡単な説明】
【0008】
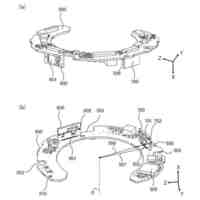
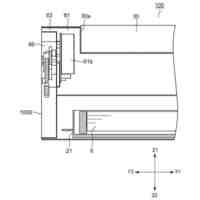
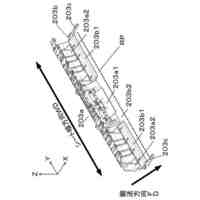
実施形態に係るロボット装置の構成を示す斜視図である。
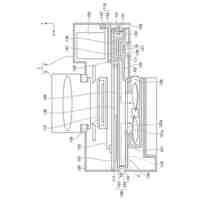
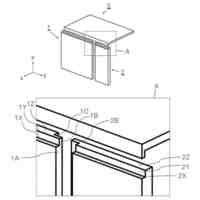
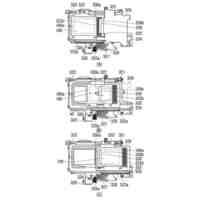
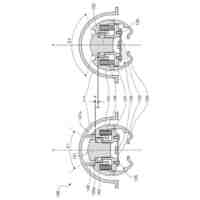
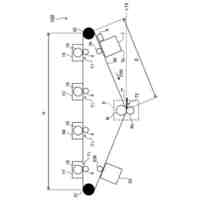
実施形態に係る減速機の概略構成を示す断面図である。
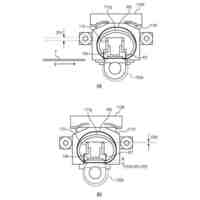
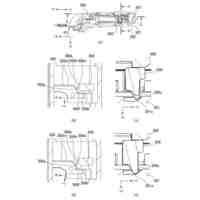
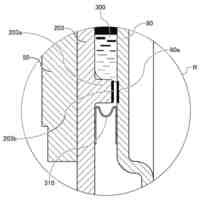
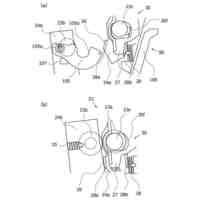
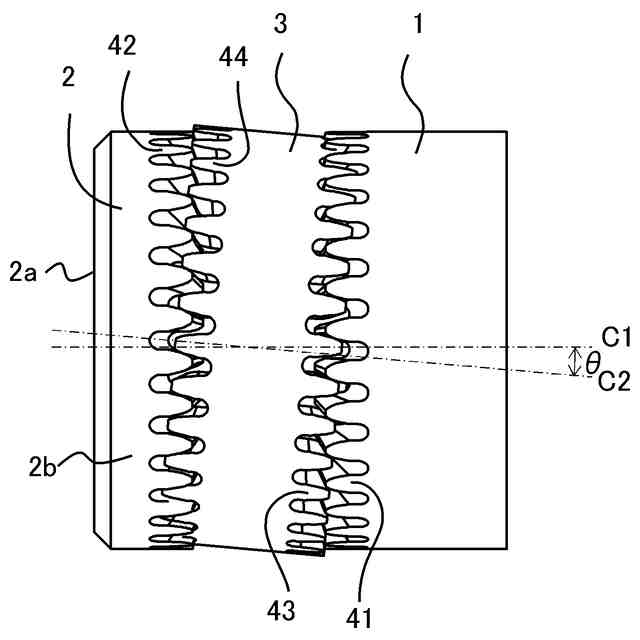
第1のギア、第2のギア及び揺動ギアを示す図である。
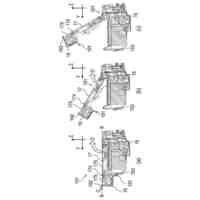
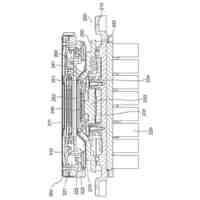
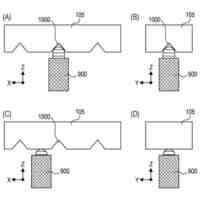
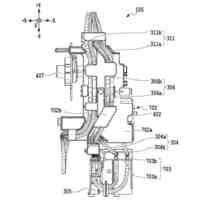
出力軸まわりの構成を示す分解斜視図である。
出力軸まわりの構成を示す断面図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して、本発明の好適な実施形態について説明する。
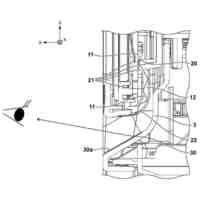
図1は、実施形態に係るロボット装置の斜視図である。
ロボット装置150は、産業用ロボットであり、ワークWの組み立て等の作業を行う多関節ロボット100と、多関節ロボット100を制御する制御装置130と、制御装置130に接続可能なティーチングペンダント140とを備える。
【0010】
多関節ロボット100は、6軸の多関節ロボットアーム(以下、単にロボットアームと呼ぶ)101と、ロボットアーム101の先端に接続されたエンドエフェクタ102とを備える。
ロボットアーム101は、作業台に固定されるベース部103と、変位や力を伝達する複数のリンク121~126と、複数のリンク121~126の各々を旋回又は回転可能に連結する複数の関節J1~J6とを備える。複数の関節J1~J6は、不図示の駆動モータと、駆動モータの回転軸の回転角度を検出する不図示のエンコーダと、駆動モータのトルクを増大させるために駆動モータの出力を減速する減速機(変速機)10とをそれぞれ備える。なお、駆動モータと減速機10とは、アクチュエータを構成する。減速機10については、後に詳しく説明する。
エンドエフェクタ102は、ロボットハンドであり、ワークWを把持する複数の把持爪104を備える。また、エンドエフェクタ102は、複数の把持爪104を駆動する不図示の駆動モータと、駆動モータの回転角度を検出する不図示のエンコーダと、駆動モータの出力を減速する不図示の減速機とを備える。また、エンドエフェクタ102は、把持爪104等に作用する応力(反力)を検出可能な不図示の力覚センサを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
定着装置
14日前
キヤノン株式会社
電子機器
8日前
キヤノン株式会社
電子機器
15日前
キヤノン株式会社
記録装置
13日前
キヤノン株式会社
測距装置
今日
キヤノン株式会社
電子機器
14日前
キヤノン株式会社
表示装置
14日前
キヤノン株式会社
記録装置
14日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
制御装置
14日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
電子機器
13日前
キヤノン株式会社
表示装置
14日前
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
表示装置
14日前
キヤノン株式会社
光学機器
20日前
キヤノン株式会社
記録装置
14日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像読取装置
6日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
電子回路基板
6日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
情報処理装置
6日前
キヤノン株式会社
画像表示装置
6日前
キヤノン株式会社
情報処理装置
6日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像形成装置
6日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ