TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025022047
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023126275
出願日
2023-08-02
発明の名称
搬送アームの位置設定方法
出願人
株式会社ディスコ
代理人
インフォート弁理士法人
主分類
H01L
21/677 20060101AFI20250206BHJP(基本的電気素子)
要約
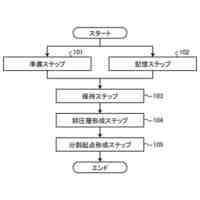
【課題】搬送調整の工数を削減する。
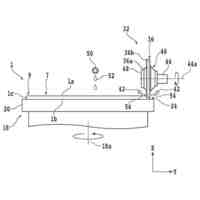
【解決手段】搬送アーム40の位置設定方法は、接近、挟持試行、判定、設定の各ステップを有する。搬送アーム40は押さえプレート421と支持プレート422を含むフレーム挟持部42と、押さえプレート421と支持プレート422の位置関係を検出するセンサ44、45を有する。接近ステップで、搬送アーム40を環状のフレームFへ近づける。その後の挟持試行ステップで、押さえプレート421と支持プレート422の間隔を縮めてフレームFの挟持を試行する。その後の判定ステップで、センサ44、45で検出した位置関係に基づきフレーム挟持部42がフレームFを挟持したかを判定する。設定ステップで、繰り返し行われた上記ステップのうちの判定ステップで挟持したと判定したときの搬送アーム40の位置からフレームFに所定距離近づけた位置を搬出位置として設定する。
【選択図】図6
特許請求の範囲
【請求項1】
被加工物が保持されたフレームユニットに用いられる環状フレームを保持機構から搬出する搬送アームの位置設定方法であって、
該搬送アームは、
該保持機構に保持された該環状フレームの厚さ方向である第1方向に整列した押さえプレートと支持プレートとを含むフレーム挟持部と、
該押さえプレートに対して該支持プレートを該第1方向へ相対的に移動させる第1移動部と、
該押さえプレートと該支持プレートとの該第1方向の位置関係を検出するセンサと、を有し、
該保持機構に保持された該環状フレームが、該第1方向において該押さえプレートと該支持プレートの間に位置し、且つ、該第1方向と直交する第2方向において該押さえプレートと該支持プレートの間に位置しない状態で、該搬送アームを該第2方向へ移動させる第2移動部を用いて該搬送アームを該環状フレームへ近づける接近ステップと、
該接近ステップ後に、該第1移動部を用いて該押さえプレートと該支持プレートの間の該第1方向の間隔を縮めて該環状フレームの挟持を試行する挟持試行ステップと、
該挟持試行ステップ後に、該センサで検出した該位置関係に基づいて該フレーム挟持部が該環状フレームを挟持したか否かを判定する判定ステップと、
繰り返し行われる該接近ステップと該挟持試行ステップと該判定ステップとのうちの該判定ステップで該フレーム挟持部が該環状フレームを挟持したと判定したときの該搬送アームの位置である基準位置から該搬送アームをさらに該環状フレームに所定距離近づけた位置を、該保持機構に保持された該環状フレームを該搬送アームが搬出する際に該搬送アームを位置付ける搬出位置として設定する設定ステップと、を備える
ことを特徴とする位置設定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送アームの位置設定方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
処理装置内における被加工物の搬送方法の一つとして、テープを介して被加工物を保持する環状フレームを、挟持部を有する搬送アームで挟持して搬送する搬送方法が知られている。挟持部を有する搬送アームは、例えば、特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-027920号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の搬送方法では、予め搬出位置の調整が行われる。搬出位置は、保持機構に保持された環状フレームを搬出する際に搬送アームが位置付けられる位置をいう。
【0005】
従来は、作業者が搬送アームを動かしながら、環状フレームに対する挟持部の高さや水平方向の位置を目視で確認することで、搬出位置の調整が行われている。このため、調整作業における作業者の負担を軽減する新たな技術の提案が期待されている。
【0006】
本発明は、かかる点に鑑みてなされたものであり、搬送調整の工数を削減することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様の方法は、被加工物が保持されたフレームユニットに用いられる環状フレームを保持機構から搬出する搬送アームの位置設定方法であって、該搬送アームは、該保持機構に保持された該環状フレームの厚さ方向である第1方向に整列した押さえプレートと支持プレートとを含むフレーム挟持部と、該押さえプレートに対して該支持プレートを該第1方向へ相対的に移動させる第1移動部と、該押さえプレートと該支持プレートとの該第1方向の位置関係を検出するセンサと、を有し、該保持機構に保持された該環状フレームが、該第1方向において該押さえプレートと該支持プレートの間に位置し、且つ、該第1方向と直交する第2方向において該押さえプレートと該支持プレートの間に位置しない状態で、該搬送アームを該第2方向へ移動させる第2移動部を用いて該搬送アームを該環状フレームへ近づける接近ステップと、該接近ステップ後に、該第1移動部を用いて該押さえプレートと該支持プレートの間の該第1方向の間隔を縮めて該環状フレームの挟持を試行する挟持試行ステップと、該挟持試行ステップ後に、該センサで検出した該位置関係に基づいて該フレーム挟持部が該環状フレームを挟持したか否かを判定する判定ステップと、繰り返し行われる該接近ステップと該挟持試行ステップと該判定ステップとのうちの該判定ステップで該フレーム挟持部が該環状フレームを挟持したと判定したときの該搬送アームの位置である基準位置から該搬送アームをさらに該環状フレームに所定距離近づけた位置を、該保持機構に保持された該環状フレームを該搬送アームが搬出する際に該搬送アームを位置付ける搬出位置として設定する設定ステップと、を備える。
【発明の効果】
【0008】
本発明によれば、搬送調整の工数を削減することができる。
【図面の簡単な説明】
【0009】
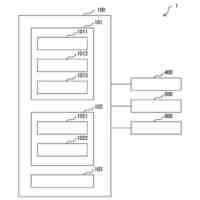
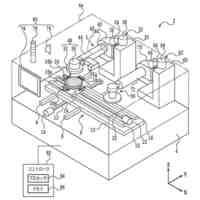
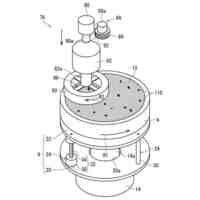
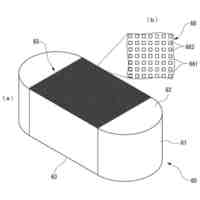
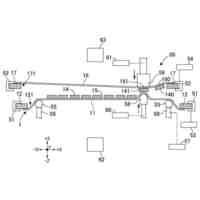
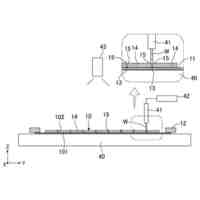
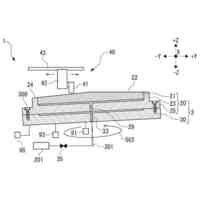
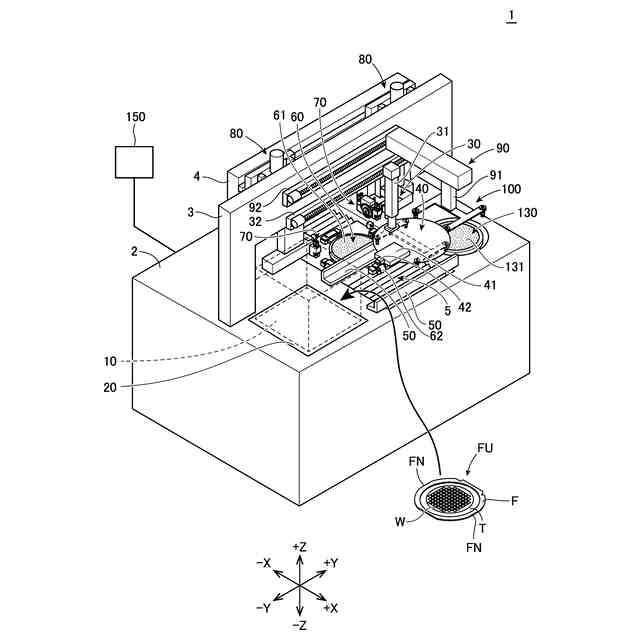
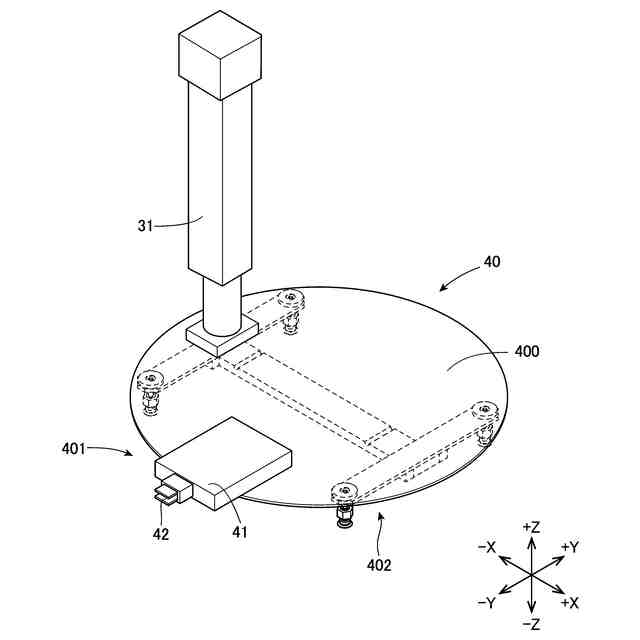
一実施形態に係る処理装置の斜視図である。
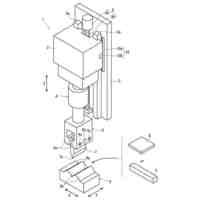
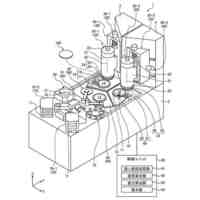
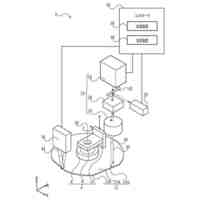
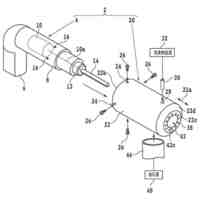
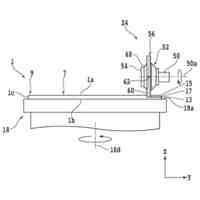
図1に示す処理装置に含まれる搬送アームの構成例を示す斜視図である。
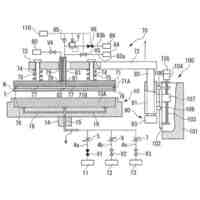
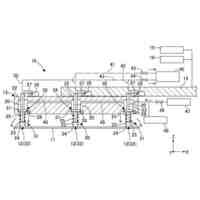
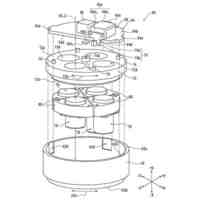
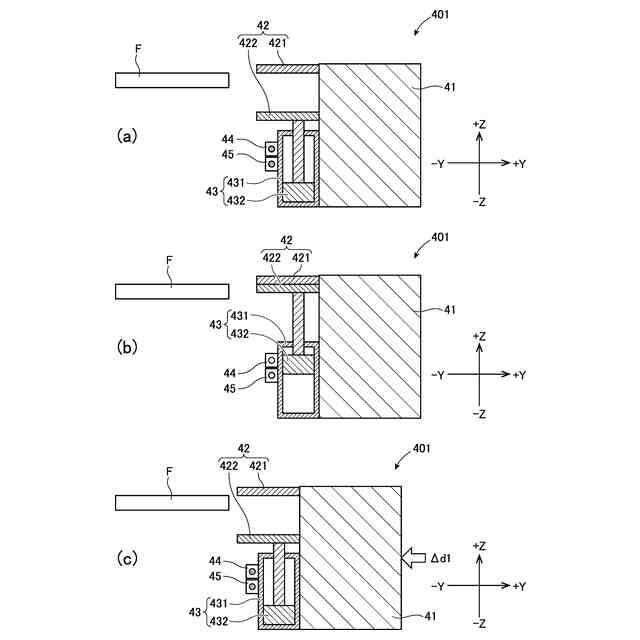
図2に示す搬送アームの挟持機構の構成例を示す図である。
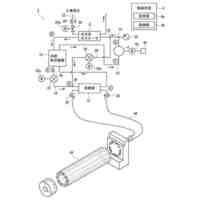
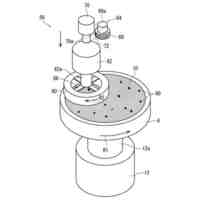
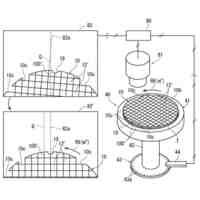
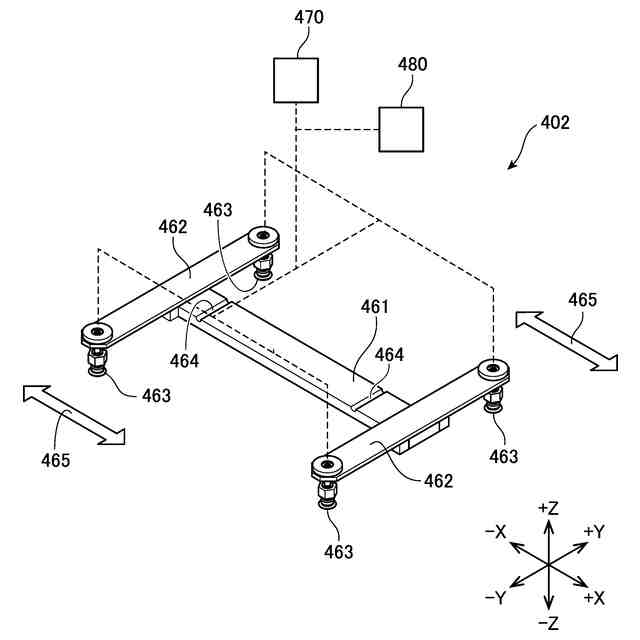
図2に示す搬送アームの吸引保持機構の構成例を示す斜視図である。
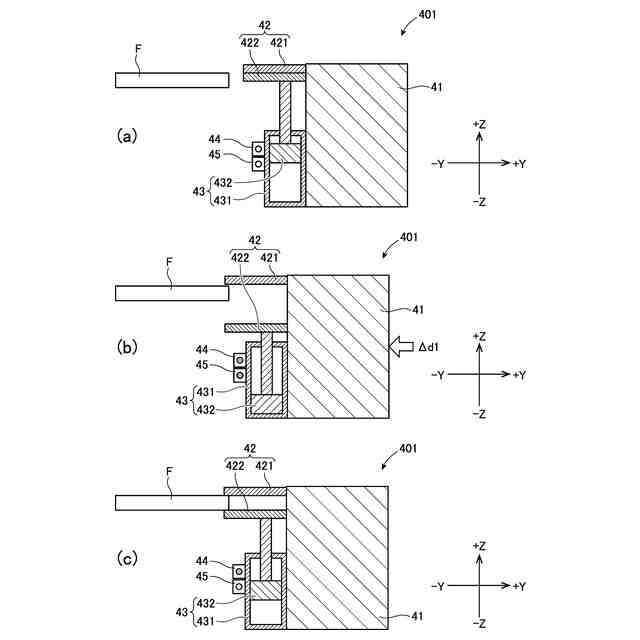
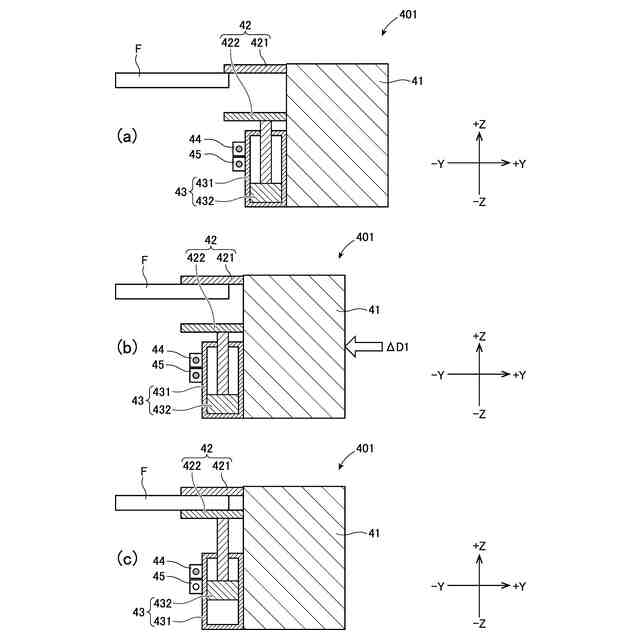
図3に示す挟持機構を用いる際における図2に示す搬送アームの搬出位置の設定例について説明する図である。
図3に示す挟持機構を用いる際における図2に示す搬送アームの搬出位置の設定例について説明する図である。
図3に示す挟持機構を用いる際における図2に示す搬送アームの搬出位置の設定例について説明する図である。
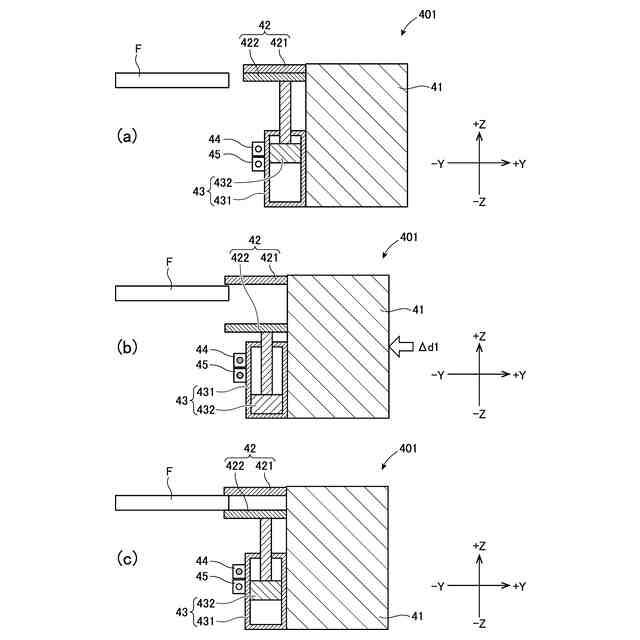
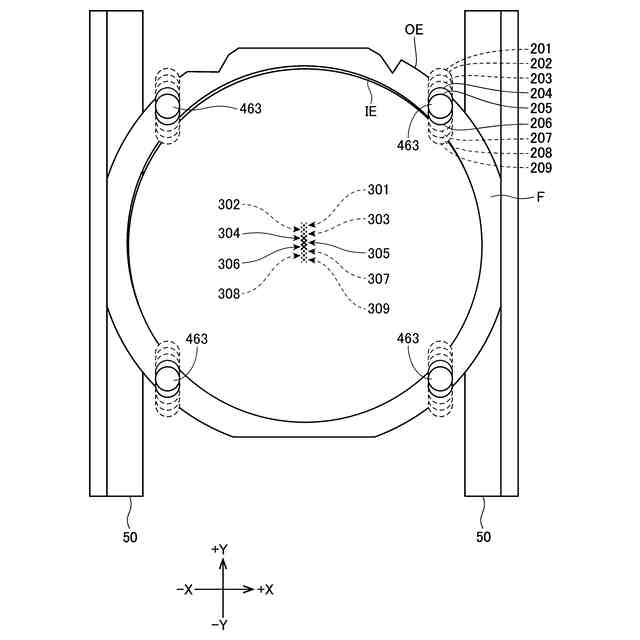
図4に示す吸引保持機構を用いる際における図2に示す搬送アームの移動例について説明する図である。
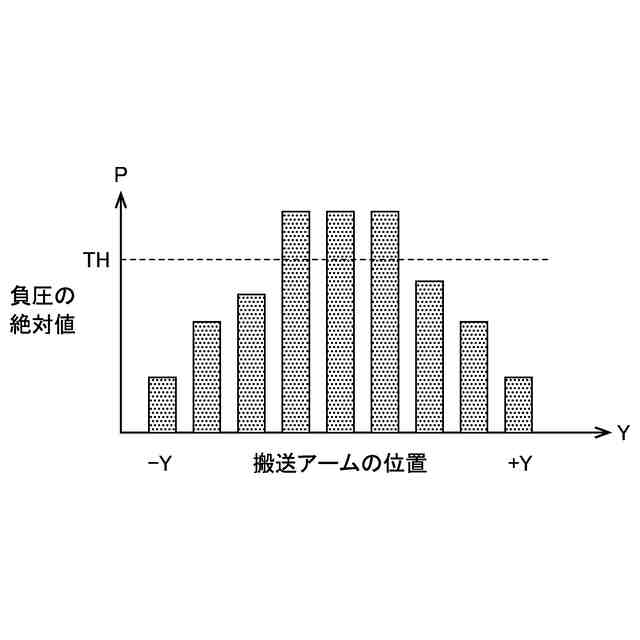
測定結果の一例を示す図である。
図4に示す吸引保持機構を用いる際における図2に示す搬送アームの搬出位置の設定例について説明する図である。
図4に示す吸引保持機構を用いる際における図2に示す搬送アームの搬出位置の設定例について説明する図である。
【発明を実施するための形態】
【0010】
図1は、一実施形態に係る処理装置1の斜視図である。図2は、処理装置1に含まれる搬送アーム40の構成例を示す斜視図である。図3は、搬送アーム40の挟持機構401の構成例を示す斜視図である。図4は、搬送アーム40の吸引保持機構402の構成例を示す斜視図である。以下では、処理装置1の構成について、図1から図4を参照しながら、説明する。なお、図面に示すX軸方向、Y軸方向、Z軸方向は互いに垂直な関係にある。X軸方向とY軸方向は略水平な方向であり、Z軸方向は上下方向(略鉛直な方向)である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ディスコ
加工装置
8日前
株式会社ディスコ
搬送装置
21日前
株式会社ディスコ
調整方法
8日前
株式会社ディスコ
冷却機構
8日前
株式会社ディスコ
研削装置
9日前
株式会社ディスコ
搬送方法
21日前
株式会社ディスコ
処理装置
15日前
株式会社ディスコ
研削装置
1日前
株式会社ディスコ
加工装置
25日前
株式会社ディスコ
研削装置
15日前
株式会社ディスコ
研削装置
8日前
株式会社ディスコ
クランプ装置
14日前
株式会社ディスコ
搬送システム
今日
株式会社ディスコ
液封式ポンプ
15日前
株式会社ディスコ
スピンナー装置
15日前
株式会社ディスコ
面取り加工装置
14日前
株式会社ディスコ
チップ移送装置
9日前
株式会社ディスコ
チップ製造方法
15日前
株式会社ディスコ
レーザ加工装置
15日前
株式会社ディスコ
チップの製造方法
9日前
株式会社ディスコ
レーザー加工装置
1日前
株式会社ディスコ
カセットアダプタ
21日前
株式会社ディスコ
工具及び集塵装置
9日前
株式会社ディスコ
チップ間隔拡張方法
8日前
株式会社ディスコ
ウェーハの研削方法
15日前
株式会社ディスコ
被加工物の加工方法
22日前
株式会社ディスコ
ウェーハの加工方法
今日
株式会社ディスコ
被加工物の分割方法
22日前
株式会社ディスコ
ウエーハの加工方法
15日前
株式会社ディスコ
被加工物の分割方法
1日前
株式会社ディスコ
被加工物の加工方法
14日前
株式会社ディスコ
ウェーハの研削方法
21日前
株式会社ディスコ
ウエーハの管理方法
21日前
株式会社ディスコ
ウエーハの加工方法
1日前
株式会社ディスコ
超音波振動ユニット
9日前
株式会社ディスコ
Web会議システム
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ