TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025020724
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124265
出願日
2023-07-31
発明の名称
屋外警備システム
出願人
富士防災警備株式会社
,
富士ロボテクスセキュリティ株式会社
代理人
弁理士法人タス・マイスター
主分類
G05D
1/00 20240101AFI20250205BHJP(制御;調整)
要約
【課題】屋外でもネット射出装置により侵入者の動きをより効果的に封じることができる屋外警備システムを提供する。
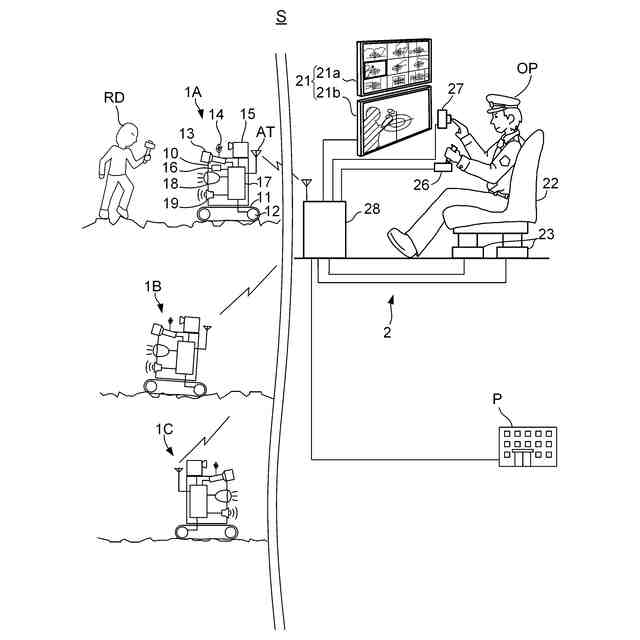
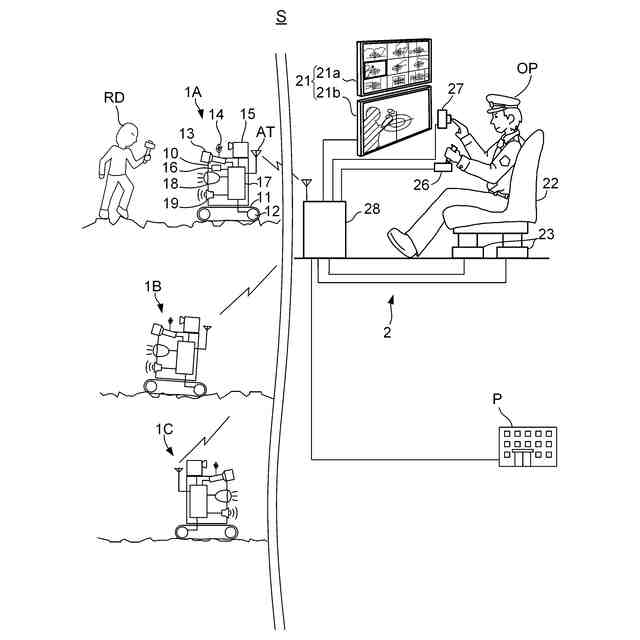
【解決手段】屋外警備システムは、屋外走行警備ロボットと遠隔管制装置とを備え、屋外走行警備ロボットは、ロボット本体と、クローラと、駆動装置と、ネット射出装置と、照準具と、照準具及び前ネットの軌跡を含んだ画像を撮影するカメラと、姿勢センサと、ロボット制御装置と、を備え、遠隔管制装置は、画像モニタと、可動式の座席と、座席アクチュエータと、運転操作子と、射出操作子と、管制制御装置と、を備え、管制制御装置は、前記運転操作子から出力される前記運転指令及び前記射出操作子から出力される射出指令を前記ロボット制御装置に送信するとともに、前記姿勢変動データに基づいて前記座席アクチュエータを動作させることによって前記モニタに表示される前記照準具に対するネットの軌跡信頼性指標を報知する。
【選択図】図1
特許請求の範囲
【請求項1】
屋外走行警備ロボットと遠隔管制装置とを備えた屋外警備システムであって、
前記屋外走行警備ロボットは、
ロボット本体と、
前記ロボット本体に取付けられ前記屋外走行警備ロボットを屋外で走行させるためのクローラと、
前記クローラを駆動する駆動装置と、
前記ロボット本体に取付けられ、ネットを射出するネット射出装置と、
前記ネット射出装置又は前記ロボット本体に取付けられ、前記ネット射出装置の射出方向を指し示す照準具と、
前記ロボット本体に取付けられ、前記照準具及び前記ネット射出装置から射出されるネットの軌跡を含んだ、前記屋外走行警備ロボットの外を撮影するカメラと、
前記ロボット本体の姿勢変動を検出する姿勢センサと、
前記カメラが撮影した画像データ及び前記姿勢センサで検出された姿勢変動データを無線通信で送信するとともに、無線通信で受信した運転指令に基づき前記駆動装置を制御し、無線通信で受信した射出指令に基づき前記ネット射出装置を制御するロボット制御装置と、を備え、
前記遠隔管制装置は、
前記ロボット制御装置から送信されたデータの画像を表示する画像モニタと、
前記遠隔管制装置が設置される床に対し姿勢が可動に設けられ、オペレータが着座する可動式の座席と、
前記座席の姿勢を変えるように駆動する座席アクチュエータと、
前記オペレータの操作に応じて前記駆動装置を動作させるための運転指令を出力する運転操作子と、
前記オペレータの操作に応じて前記ネット射出装置を動作させるための射出指令を出力する射出操作子と、
前記ロボット制御装置と通信することで前記駆動装置及び前記ネット射出装置を制御するとともに前記座席アクチュエータを制御する管制制御装置と、を備え、
前記管制制御装置は、前記運転操作子から出力される前記運転指令及び前記射出操作子から出力される射出指令を前記ロボット制御装置に送信するとともに、前記姿勢変動データに基づいて前記座席アクチュエータを動作させることによって前記画像モニタに表示される前記照準具に対するネットの軌跡信頼性指標を報知する。
続きを表示(約 600 文字)
【請求項2】
請求項1記載の屋外警備システムであって、
前記遠隔管制装置は、前記座席と、前記オペレータが足を載せる足載せ台とを搭載し、前記オペレータが乗り込むコックピットを備え、
前記座席アクチュエータは前記座席及び前記足載せ台を駆動する。
【請求項3】
請求項1記載の屋外警備システムであって、
前記ロボット制御装置は、前記運転操作子からの運転指令なしに前記カメラで撮影される画像に基づいて自立走行し、前記カメラで撮影される画像に人物が含まれると判断する場合、前記管制制御装置に人物通報データを送信する。
【請求項4】
請求項3記載の屋外警備システムであって、
前記管制制御装置は、前記カメラで撮影される画像に複数の人物が含まれると判断する場合、前記警備システム外の所定機関に通報データを送信する。
【請求項5】
請求項4記載の屋外警備システムであって、
前記屋外走行警備ロボットは、複数台であり、
前記管制制御装置は、前記複数台の前記屋外走行警備ロボットのうちの何れかから、画像に人物が含まれることが報知された場合、前記座席アクチュエータに前記座席に対して衝撃を生じさせるとともに、画像に人物が含まれることを報知した前記屋外走行警備ロボットの画像を前記画像モニタの特定領域に表示する。
発明の詳細な説明
【技術分野】
【0001】
本発明は、屋外警備システムに関する。
続きを表示(約 4,800 文字)
【背景技術】
【0002】
例えば、特許文献1には、警備用ロボットが示されている。このロボットは、撮像センサを備え、画像情報として周囲環境を取得しながら所定の警備範囲で自律的に巡回する。ロボットは、侵入者である人物を検知すると、外部に設けられた警備管理室に異常を通知する。
【0003】
また、ロボットは、侵入者に対し例えば、音や光による威嚇を行なう。また、ロボットは、ネット射出装置を備え、音や光による威嚇では不十分な場合、侵入者に向けてネットを射出する。
【先行技術文献】
【特許文献】
【0004】
特開2012-215959号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
警備システムを屋外の警備に対応させることが考えられる。つまり、ロボットを屋外の巡回に対応させることが考えられる。警備システムを屋外の警備に対応させるため、ロボットの走行装置として一対のクローラ、すなわちキャタピラ(登録商標)を備え、不整地又は凹凸の上の走行に対応することが考えられる。
屋外の警備に対応するロボットは、例えば屋内型ロボットの場合のような床面、又は上り下りが想定された斜面や段差を走行するのとは異なり、斜度も高低差も予測し難い不整地、警備範囲の外から入り込んでくる石やがれき、又は、雨で生じたぬかるみの上を走行する場合がある。このとき、ロボット自体の姿勢が前後左右に傾いたり、姿勢が不安定になったりする場合がある。
【0006】
音又は光は、それ自体重量を有さず、進行に伴う空気抵抗や重力の影響を受けない。従って、ロボットから出力される音又は光は、射出された方向に直進する。例えば、拡がるように射出された音又は光は、空中を拡がりながら伝播する。このため、例えば侵入者が音又は光の出力中心軸からずれていても、音又は光は相手に到達する。また、例えば、指向性を有するように狙って射出された音又は光は、狙いの向きに真っ直ぐ進む。従って、威嚇の効果が期待できる。
この一方、ネットは、通常、射出後、侵入者である人間の手足又は頭に掛かる程度の大きさに展開する。ネットが侵入者の手足又は頭に掛かることによって侵入者の動きが物理的に妨げられる。ネットは、音又は光とは異なり侵入者に接触するが、例えば銃弾や矢と比べ柔軟であり軽いため、侵入者を傷つけにくい。
ネットは、銃弾や矢と比べ柔軟であり軽いが、音又は光とは異なり、重量を有する。また、射出されたネットの進行速度は、音、光、銃弾、又は、矢と比べて遅い。つまり、ネットが対象に到達するまでの時間、即ち滞空時間は、音、光、銃弾、又は、矢と比べて長い。従って、ネット射出装置から射出されるネットは、進行の際の空気抵抗と重力の影響を受けやすい。このため、ネット射出装置から射出されるネットは、直進せず、放物線に沿って進行する。特に遠距離型のネット射出装置は、逃げるように遠ざかろうとする侵入者に対しても有効であるが、遠距離型のネット射出装置から射出されるネットは、空中を進行する際に受ける重力と空気抵抗の影響がさらに大きく、比較的大きな放物線を描くように進行する。進行の軌跡が直線からずれ、目標からずれる対策として、侵入者をより覆いやすくするよう大きなネットを用いることが考えられる。しかし、ネットを大きくすると、拡がったネットの一部が進行中に地面の凹凸に引っかかり、ネットが侵入者に到達しなかったり、侵入者の手足を十分に覆うことができなかったりする場合がある。
屋外を警備するロボットは、上述したように、走行中、ロボット自体の姿勢が前後左右に傾く場合がある。
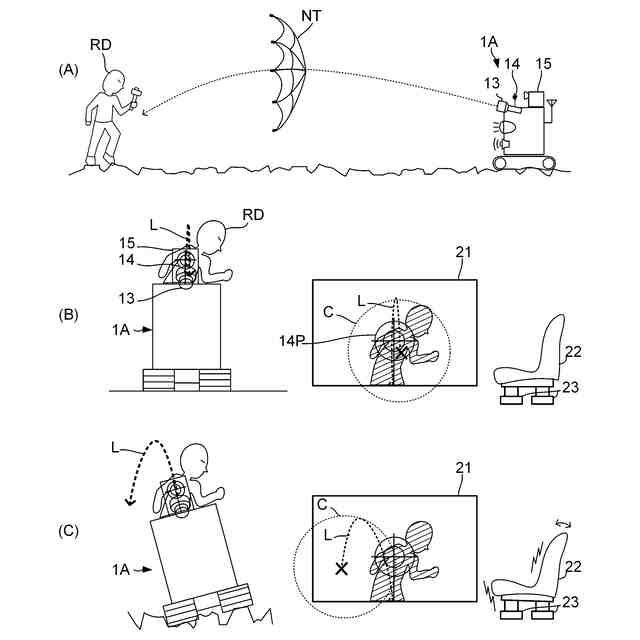
ロボットを遠隔操作するオペレータは、カメラで撮影されモニタに表示される画像を見て、ロボットの周囲の状況及びロボット自体の状況を把握しようとする。しかし、例えばモニタの画像の中の侵入者の身体が斜めに見える場合、侵入者自身が斜めの体勢をとっているのか、ロボット自体の姿勢が斜めなのか、オペレータには把握しがたい。特に夜間における屋外の警備中など、画像で侵入者の奥の背景が見難い場合、オペレータは姿勢についての状況を把握しがたい。
ロボットの姿勢が斜めの状態でオペレータが射出を命令すると、射出されたネットの軌跡は重力の影響で下方へ曲がる。これは、モニタに表示される画像では、ネットが右方向又は左方向へ曲がって進むことを意味する。ネットが曲がって進むと、侵入者の手足又は頭を効果的にカバーできない場合がある。ネットは1台の射出装置から1つのみ射出されるため、音又は光とは異なり、やり直し又は繰返しの発射が容易でない。従って、侵入者の動きを効果的に封じることができない場合がある。
なお、このような課題は、上述した遠距離型のネット射出装置に限らず、ロボットに搭載され、音又は光とは異なり重量を有するネットを射出するネット射出装置一般に対し言えることである。
【0007】
本発明の目的は、屋外でもネット射出装置により侵入者の動きをより効果的に封じることができる屋外警備システムを提供することである。
【課題を解決するための手段】
【0008】
以上の知見に基づいた本発明の各観点による屋外警備システムは、次の構成を備える。
【0009】
(1)屋外走行警備ロボットと遠隔管制装置とを備えた屋外警備システムであって、
前記屋外走行警備ロボットは、
ロボット本体と、
前記ロボット本体に取付けられ前記屋外走行警備ロボットを屋外で走行させるためのクローラと、
前記クローラを駆動する駆動装置と、
前記ロボット本体に取付けられ、ネットを射出するネット射出装置と、
前記ネット射出装置又は前記ロボット本体に取付けられ、前記ネット射出装置の射出方向を指し示す照準具と、
前記ロボット本体に取付けられ、前記照準具及び前記ネット射出装置から射出されるネットの軌跡を含んだ、前記屋外走行警備ロボットの外を撮影するカメラと、
前記ロボット本体の姿勢変動を検出する姿勢センサと、
前記カメラが撮影した画像データ及び前記姿勢センサで検出された姿勢変動データを無線通信で送信するとともに、無線通信で受信した運転指令に基づき前記駆動装置を制御し、無線通信で受信した射出指令に基づき前記ネット射出装置を制御するロボット制御装置と、を備え、
前記遠隔管制装置は、
前記ロボット制御装置から送信されたデータの画像を表示する画像モニタと、
前記遠隔管制装置が設置される床に対し姿勢が可動に設けられ、オペレータが着座する可動式の座席と、
前記座席の姿勢を変えるように駆動する座席アクチュエータと、
前記オペレータの操作に応じて前記駆動装置を動作させるための運転指令を出力する運転操作子と、
前記オペレータの操作に応じて前記ネット射出装置を動作させるための射出指令を出力する射出操作子と、
前記ロボット制御装置と通信することで前記駆動装置及び前記ネット射出装置を制御するとともに前記座席アクチュエータを制御する管制制御装置と、を備え、
前記管制制御装置は、前記運転操作子から出力される前記運転指令及び前記射出操作子から出力される射出指令を前記ロボット制御装置に送信するとともに、前記姿勢変動データに基づいて前記座席アクチュエータを動作させることによって前記画像モニタに表示される前記照準具に対するネットの軌跡信頼性指標を報知する。
【0010】
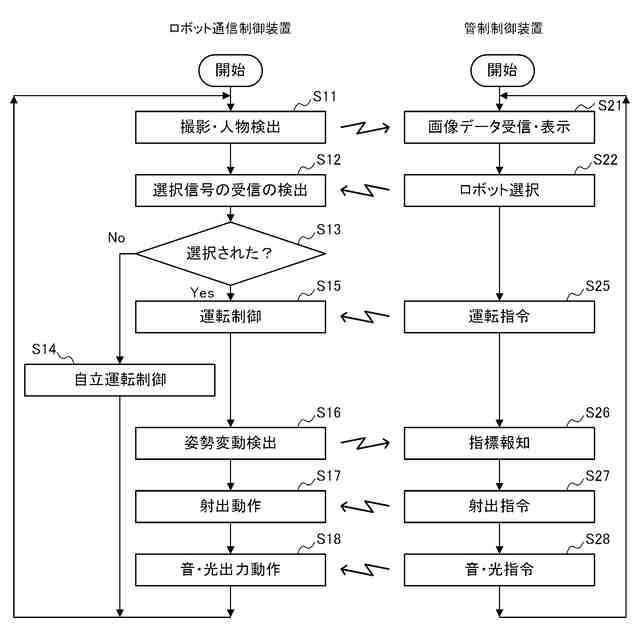
(1)の屋外警備システムは、屋外走行警備ロボットと遠隔管制装置とを備えている。屋外走行警備ロボットのロボット制御装置と遠隔管制装置の管制制御装置とは、互いに無線通信可能に設けられている。オペレータは、遠隔管制装置及びロボット制御装置を介して、遠隔地の屋外にある屋外走行警備ロボットを制御する。
屋外走行警備ロボットは、クローラを備えているため、屋内走行の場合とは異なり、斜度も高低差も予測し難い不整地、警備範囲の外から入り込んでくる石やがれき、又は、雨で生じたぬかるみの上を走行することができる。
屋外走行警備ロボットは、このロボットの外を撮影するカメラを備えている。カメラで撮影された画像のデータは、遠隔管制装置及びロボット制御装置を介して、画像モニタに表示される。オペレータは、画像モニタに表示された画像を見ながら屋外走行警備ロボットを操縦する。即ち、オペレータは、運転操作子を操作する。運転操作子は、操作に応じて駆動装置を動作させるための運転指令を出力する。運転指令は、遠隔管制装置を介してロボット制御装置に送信され、ロボット制御装置は、クローラを駆動する。オペレータは、ロボットの外の画像に侵入者を発見すると、屋外走行警備ロボットで侵入者を追跡する。
屋外走行警備ロボットは、ネット射出装置を備えている。ネット射出装置は、ネットを射出する。オペレータが射出操作子を操作すると、射出操作子が、ネット射出装置を動作させるための射出指令を出力する。射出指令は、遠隔管制装置を介してロボット制御装置に送信され、ロボット制御装置は、ネット射出装置にネットを射出させる。ネットは、侵入者の手、足、又は頭に絡みつくことによって、侵入者の動きを封じる。このため、オペレータは、ネットが侵入者の手、足、又は頭に向かって射出されるよう、ネット射出装置が取付けられた屋外走行警備ロボットを侵入者に向けて、ネットを射出させることが求められる。画像モニタに表示される画像には、ネット射出装置の射出方向を指し示す照準具が含まれている。オペレータは、画像モニタに表示される照準具を参照しながら、ネット射出装置が取付けられた屋外走行警備ロボットを侵入者に向ける。
ネット射出装置から射出されるネットは、直進せず、下方に曲がる放物線に沿って進行する。屋外走行警備ロボットが傾いている場合、ネット射出装置から射出されるネットは、照準具で指し示される射出方向には進行せず、屋外走行警備ロボットとともに傾いたカメラを基準として見ると、左右にずれた方向へ進行する。
本発明の管制制御装置は、姿勢センサによって検出されたロボット本体の姿勢変動を表わす姿勢変動データに基づいて座席アクチュエータを動作させる。座席アクチュエータに寄って座席が駆動されることで、モニタに表示される照準に対するネットの軌跡の信頼性指標がオペレータに報知される。
オペレータは、報知された信頼性指標に基づいて、ネット射出装置の動作を判断することができる。例えば、屋外走行警備ロボットが傾いている場合、屋外走行警備ロボットの傾きが小さい場所へ移動してからネット射出装置を動作させることができる。また、オペレータは、屋外走行警備ロボットの傾きによる軌跡のずれを考慮した位置に侵入者が表示されるように屋外走行警備ロボットを移動させてから、ネット射出装置を動作させることができる。つまり、屋外警備システムは、ネットの軌跡の信頼性指標を報知することによって、ネット射出装置がより高い精度でネットを射出できる状況で、ネットを射出することが可能になる。従って、(1)の屋外警備システムによれば、屋外でもネット射出装置により侵入者の動きをより効果的に封じることができる
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
富士防災警備株式会社
屋外警備システム
今日
富士防災警備株式会社
地震予測方法及び地震予測システム
11か月前
個人
方向検出器
2か月前
ugo株式会社
移動体
2か月前
個人
無人作業システム
13日前
アズビル株式会社
制御装置
6日前
村田機械株式会社
産業機械
27日前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
自律移動体
27日前
トヨタ自動車株式会社
自律移動体
2か月前
コフロック株式会社
流量制御装置
7日前
株式会社丸和製作所
入力機器
6日前
トヨタ自動車株式会社
配送システム
2か月前
株式会社クボタ
作業車
27日前
株式会社フジキン
流体制御装置
2か月前
株式会社明電舎
車両
27日前
株式会社フジキン
流量制御装置
6日前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社ダイフク
搬送設備
14日前
株式会社ダイフク
搬送設備
2か月前
株式会社村田製作所
温度補償回路
13日前
トヨタ自動車株式会社
自律移動システム
2か月前
トヨタ自動車株式会社
位置推定システム
2か月前
トヨタ自動車株式会社
ロボットシステム
27日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社FUJI
工作機械の操作システム
3か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
14日前
株式会社ダイフク
物品搬送設備
14日前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
20日前
ローム株式会社
電源回路
2か月前
キヤノン株式会社
情報処理装置
1か月前
旭精機工業株式会社
監視データ処理装置
21日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ