TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025019162
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2024202813,2023553766
出願日
2024-11-20,2021-10-11
発明の名称
飛行体
出願人
三共木工株式会社
代理人
個人
主分類
B64U
10/20 20230101AFI20250130BHJP(航空機;飛行;宇宙工学)
要約
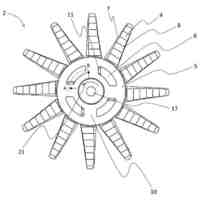
【課題】外乱に対する飛行の安定性を向上させる。
【解決手段】飛行体は、一端が本体に連結された複数のアームと、前記複数のアームの各々の他端に設けられた取り付け部と、前記取り付け部に取り付けられたプロペラ及び前記プロペラを回転させるためのモータと、を備える飛行体であって、前記取り付け部には、重量物体が備えられる。
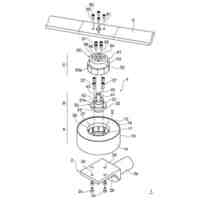
【選択図】図1
特許請求の範囲
【請求項1】
一端が本体に連結された複数のアームと、
前記複数のアームの各々の他端に設けられた取り付け部と、
前記取り付け部に取り付けられたプロペラ及び前記プロペラを回転させるためのモータと、
を備える飛行体であって、
前記取り付け部には、重量物体が備えられる、
飛行体。
続きを表示(約 910 文字)
【請求項2】
前記重量物体は、前記プロペラ及び前記モータ以外の電気機器、荷物、及び人の少なくとも1つである、請求項1に記載の飛行体。
【請求項3】
前記電気機器は、モータ用電源である、請求項2に記載の飛行体。
【請求項4】
前記重量物体を、前記取り付け部と前記本体との間を移動させる移動機構を備え、
前記飛行体の飛行が、飛行の安定性を重視する安定性重視モードと、飛行の操縦性を重視する操縦性重視モードとに切り替え可能であり、
前記移動機構は、前記飛行体の飛行が安定性重視モードの場合、前記重量物体を前記取り付け部に移動させ、前記飛行体の飛行が操縦性重視モードの場合、前記重量物体を前記本体に移動させる、
請求項1~請求項3の何れか1項に記載の飛行体。
【請求項5】
前記飛行体は、
エアクラフトとして飛行するための構成と、
複数枚のプロペラのマルチコプタとして飛行するための構成と、
を有する、
請求項1に記載の飛行体。
【請求項6】
前記エアクラフトとしての構成として、
前記本体を挟んで左右に設けられた一対の固定翼と、
前記一対の固定翼の各々の先端に設けられた前記取り付け部と、
前記取り付け部の後側に設けられた後側支持柱の後端に設けられ、推進力を発生させるエアクラフト用プロペラと、
前記エアクラフト用プロペラを回転させるエアクラフト用モータと、
を備え
前記マルチコプタとしての構成として、
前記一対の固定翼の各々の先端に設けられた前記取り付け部の前側に設けられた前側支持柱の各々の先端下側又は上側に設けられたマルチコプタ用プロペラと、
前記一対の固定翼の各々の先端に設けられた前記取り付け部の後側支持柱の各々の後部から上側又は下側に伸びる伸長支持柱の先端に設けられたマルチコプタ用プロペラと、
前記マルチコプタ用プロペラを回転させるマルチコプタ用モータと、
を備える、
請求項5に記載の飛行体。
発明の詳細な説明
【技術分野】
【0001】
本開示の技術は、飛行体に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
日本国特開2021-145586号公報には、機体本体と、機体本体から延びる複数のアームと、アーム先端に配置されたプロペラ及びモータとを備えるドローンが開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかし、上記ドローンでは、機体本体の重量が、複数のアーム側の重量に比較して、大きいので、機体本体の重心回りの慣性力が小さく、機体本体への横風等の外乱に対する飛行の安定性が悪い。
【0004】
そこで、本開示の技術は、外乱に対する飛行の安定性を向上させた飛行体を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため本開示の技術の第1の態様の飛行体は一端が本体に連結された複数のアームと、前記複数のアームの各々の他端に設けられた取り付け部と、前記取り付け部に取り付けられたプロペラ及び前記プロペラを回転させるためのモータと、を備える飛行体であって、前記取り付け部には、重量物体が備えられる。
【0006】
第2の態様の飛行体は、前記重量物は、前記重量物体は、前記プロペラ及び前記モータ以外の電気機器、荷物、及び人の少なくとも1つである。
【0007】
第3の態様の飛行体は、前記電気機器は、モータ用電源である。
【0008】
第4の態様の飛行体は、前記重量物体を、前記取り付け部と前記本体との間を移動させる移動機構を備え、前記飛行体の飛行が、飛行の安定性を重視する安定性重視モードと、飛行の操縦性を重視する操縦性重視モードとに切り替え可能であり、前記移動機構は、前記飛行体の飛行が安定性重視モードの場合、前記重量物体を前記取り付け部に移動させ、前記飛行体の飛行が操縦性重視モードの場合、前記重量物体を前記本体に移動させる。
【発明の効果】
【0009】
本開示の技術の第1の態様~第4の態様は、外乱に対する飛行の安定性を向上させることができる。
本開示の技術の第4の態様は、安定性重視モードの場合、飛行の安定性を向上させ、操縦性重視モードの場合、操縦性を向上させることができる。
【図面の簡単な説明】
【0010】
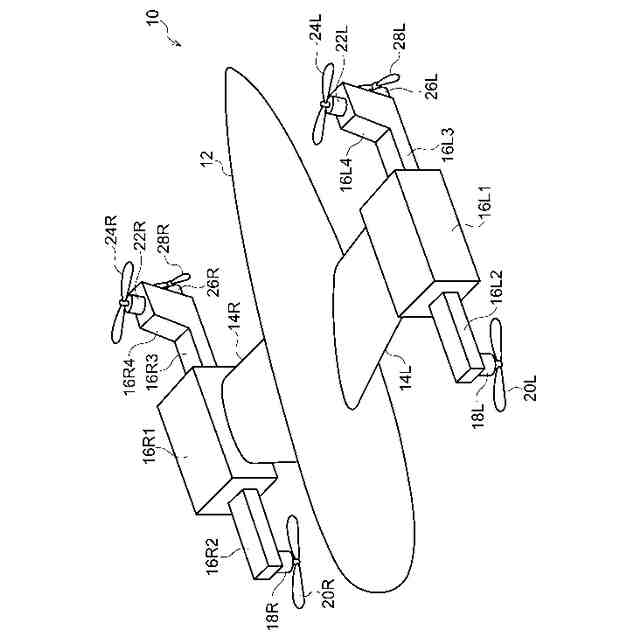
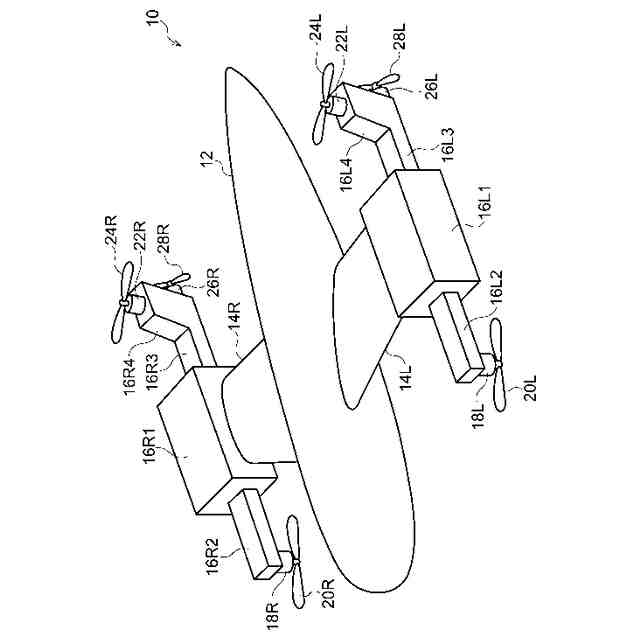
無人飛行体の構成を示す全体斜視図である。
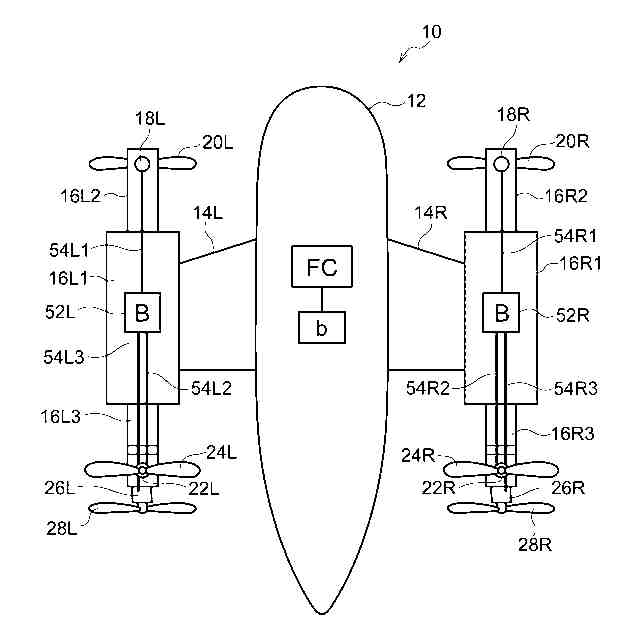
無人飛行体の電気的構成のブロック図である。
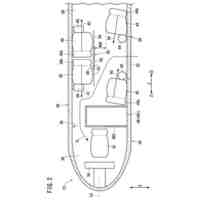
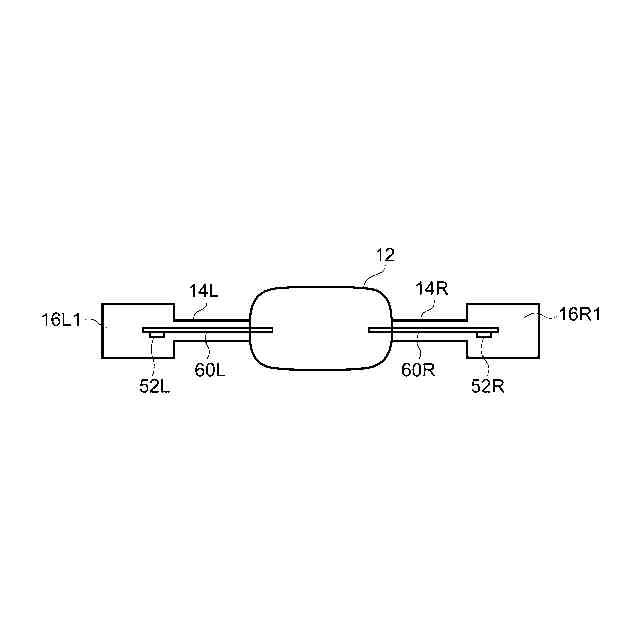
移動機構が、無人飛行体の飛行が安定性重視モードの場合、重量物体を取り付け部に移動させた様子を示す図である。
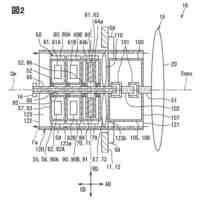
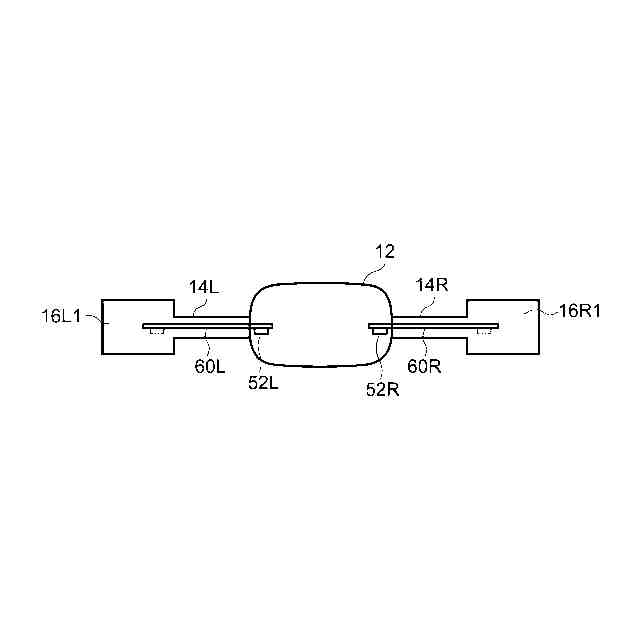
移動機構が、無人飛行体の飛行が操縦性重視モードの場合、重量物体を本体に移動させた様子を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
22日前
個人
ドローンシステム
2か月前
株式会社三圓
浮上装置
6か月前
個人
飛行艇
8か月前
個人
ドローンの計測操作方法2
6か月前
個人
垂直離着陸機用エンジン改
1か月前
個人
ドローンの計測操作方法3
6か月前
キヤノン電子株式会社
磁気トルカ
7か月前
個人
空中移動システム
3か月前
個人
ドローン消音装置
4か月前
個人
ドローンを自動離着陸する方法
2か月前
個人
エアライナー全自動パラシュート
22日前
トヨタ自動車株式会社
ドローン
9日前
合同会社アドエア
パラシュート射出装置
22日前
株式会社ACSL
システム
29日前
株式会社ACSL
システム
29日前
合同会社アドエア
飛行体の落下補助装置
3か月前
株式会社セネック
ドローンポート
9か月前
株式会社セネック
ドローンポート
9か月前
個人
垂直離着陸機用ガスタービンエンジン
2か月前
全日本空輸株式会社
ドーリシステム
5か月前
株式会社SUBARU
移動体
3か月前
ミネベアミツミ株式会社
無人機
8日前
ミネベアミツミ株式会社
無人機
8日前
HDサービス合同会社
カメラ装着装置
5か月前
株式会社SUBARU
構造体の製造方法
7か月前
株式会社小糸製作所
航空機用灯具
7か月前
本田技研工業株式会社
移動体
5か月前
本田技研工業株式会社
移動体
7か月前
本田技研工業株式会社
移動体
7か月前
本田技研工業株式会社
航空機
5か月前
本田技研工業株式会社
航空機
5か月前
株式会社SUBARU
構造体の製造方法
7か月前
株式会社デンソー
推進装置
8か月前
株式会社日立製作所
推進装置
4か月前
個人
回転翼飛行体
8か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ