TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018058
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023121460
出願日
2023-07-26
発明の名称
ディスク装置
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G11B
19/28 20060101AFI20250130BHJP(情報記憶)
要約
【課題】消費電力を低減する。
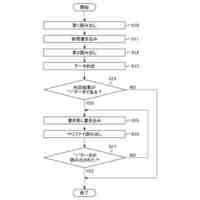
【解決手段】一つの実施形態によれば、ディスク装置において、コントローラは、回転待ち時間がある場合、第1の期間における第1の区間でモータ電流の絶対値を増加させ、第1の区間より後の第2の区間でモータ電流の絶対値を第1の平均変化率で変化させ、第2の区間より後の第3の区間でモータ電流の絶対値を第2の平均変化率で減少させ、第3の区間より後の第4の区間でモータ電流の絶対値を第3の平均変化率で減少させる。コントローラは、回転待ち時間がない場合、第2の期間における第5の区間でモータ電流の絶対値を増加させ、第5の区間より後の第6の区間でモータ電流の絶対値を第4の平均変化率で変化させ、第6の区間より後の第7の区間でモータ電流の絶対値を第5の平均変化率で減少させる。第2の期間は、ヘッドを加速又は減速させる期間である。第5の平均変化率は、第4の平均変化率より急峻である。
【選択図】図1
特許請求の範囲
【請求項1】
ヘッドと、
記録面を有するディスクと、
前記記録面に沿って前記ヘッドをシークさせるモータと、
前記モータを制御するコントローラと、
を備え、
前記コントローラは、
前記ヘッドが前記ディスクの目標トラックに到達してから目標セクタに到達するまで回転待ち時間がない場合、前記ヘッドを加速又は減速させる第1の期間における第1の区間でモータ電流の絶対値を増加させ、前記第1の期間における前記第1の区間より後の第2の区間でモータ電流の絶対値を第1の平均変化率で変化させ、前記第1の期間における前記第2の区間より後の第3の区間でモータ電流の絶対値を前記第1の平均変化率より急峻な第2の平均変化率で減少させ、
前記回転待ち時間がある場合、前記ヘッドを加速又は減速させる第2の期間における第4の区間でモータ電流の絶対値を増加させ、前記第2の期間における前記第4の区間より後の第5の区間でモータ電流の絶対値を第3の平均変化率で変化させ、前記第2の期間における前記第5の区間より後の第6の区間でモータ電流の絶対値を前記第3の平均変化率より急峻な第4の平均変化率で減少させ、前記第2の期間における前記第6の区間より後の第7の区間でモータ電流の絶対値を前記第4の平均変化率より急峻な第5の平均変化率で減少させる
ディスク装置。
続きを表示(約 1,300 文字)
【請求項2】
前記コントローラは、逆起電圧を考慮した限界電流を推定し、前記回転待ち時間がある場合、前記第6の区間でモータ電流の絶対値を前記限界電流の絶対値の変化に沿う前記第4の平均変化率で減少させる
請求項1に記載のディスク装置。
【請求項3】
前記コントローラは、逆起電圧を考慮した限界電流を推定し、前記回転待ち時間がある場合、前記第2の期間の電流指示値を生成し、前記限界電流を超える前記第6の区間の前記電流指示値を前記限界電流で置き換えて補正し、補正後の電流指示値で前記モータを駆動する
請求項2に記載のディスク装置。
【請求項4】
前記コントローラは、前記第5の区間でモータ電流の絶対値を前記限界電流の絶対値の変化の平均変化率よりゼロに近い前記第3の平均変化率で変化させる
請求項2に記載のディスク装置。
【請求項5】
電源電圧をV、逆起電圧をV
BEMF
、前記モータの回路抵抗をRとするとき、前記コントローラは、前記限界電流i
VCM_limit
を
i
VCM_limit
=(V-V
BEMF
)/R
により推定する
請求項2に記載のディスク装置。
【請求項6】
前記コントローラは、電源電圧Vとして、測定された電源電圧、又はワースト条件に対して設計された電源電圧を用いる
請求項5に記載のディスク装置。
【請求項7】
電源電圧をV、逆起電圧をV
BEMF
、前記第6の区間のモータ電流をi
VCM
とするとき、前記コントローラは、前記モータの回路抵抗Rとして、
R=(V-V
BEMF
)/i
VCM
により推定されるRを用いる
請求項5に記載のディスク装置。
【請求項8】
前記コントローラは、逆起電圧V
BEMF
として、測定された逆起電圧、又は前記ヘッドの半径方向の速度をv、電流力定数をKfとするときに
V
BEMF
=vKf
により推定されるV
BEMF
を用いる
請求項5に記載のディスク装置。
【請求項9】
前記コントローラは、前記ヘッドの半径方向の速度vとして、前記ヘッドで前記ディスクからリードされるサーボ情報により復調された位置の微分、又は前記復調された位置及び電流指示値から推定される速度を用いる
請求項5に記載のディスク装置。
【請求項10】
前記コントローラは、モータ電流i
VCM
として、測定された電流、前記ヘッドで前記ディスクからリードされるサーボ情報により復調された位置の2階微分に加速度電流変換係数を乗じて推定される電流、又は前記復調された位置及び電流指示値から推定される加速度に前記加速度電流変換係数を乗じて推定される電流を用いる
請求項7に記載のディスク装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本実施形態は、ディスク装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
モータを有するディスク装置は、そのモータに駆動電力を供給することで、所定の制御動作を実現する。このとき、ディスク装置における消費電力を低減することが望まれる。
【先行技術文献】
【特許文献】
【0003】
米国特許第6038096号明細書
米国特許第9275667号明細書
米国特許第7110214号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
一つの実施形態は、消費電力を低減できるディスク装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
一つの実施形態によれば、ヘッドとディスクとモータとコントローラとを有するディスク装置が提供される。ディスクは、記録面を有する。モータは、記録面に沿ってヘッドをシークさせる。コントローラは、回転待ち時間がある場合、第1の期間における第1の区間でモータ電流の絶対値を増加させ、第1の期間における第1の区間より後の第2の区間でモータ電流の絶対値を第1の平均変化率で変化させ、第1の期間における第2の区間より後の第3の区間でモータ電流の絶対値を第2の平均変化率で減少させ、第1の期間における第3の区間より後の第4の区間でモータ電流の絶対値を第3の平均変化率で減少させる。回転待ち時間は、ヘッドがディスクの目標トラックに到達してから目標セクタに到達するまでの時間である。第1の期間は、ヘッドを加速又は減速させる期間である。第2の平均変化率は、第1の平均変化率より急峻である。第3の平均変化率は、第2の平均変化率より急峻である。コントローラは、回転待ち時間がない場合、第2の期間における第5の区間でモータ電流の絶対値を増加させ、第2の期間における第5の区間より後の第6の区間でモータ電流の絶対値を第4の平均変化率で変化させ、第2の期間における第6の区間より後の第7の区間でモータ電流の絶対値を第5の平均変化率で減少させる。第2の期間は、ヘッドを加速又は減速させる期間である。第5の平均変化率は、第4の平均変化率より急峻である。
【図面の簡単な説明】
【0006】
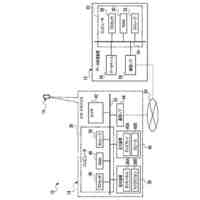
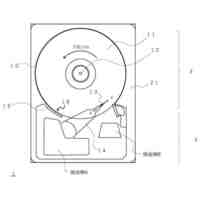
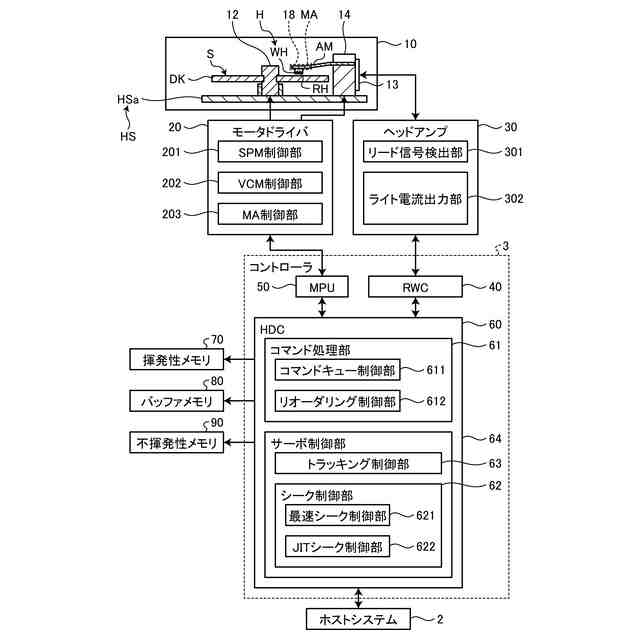
実施形態にかかるディスク装置の構成を示す図。
実施形態におけるシーク動作を示す図。
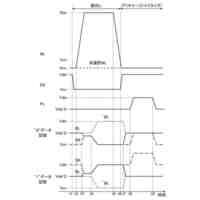
実施形態におけるシーク期間とその各区間の定義を示す図。
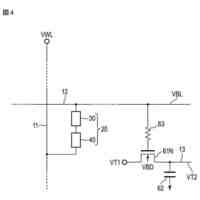
実施形態におけるVCMの等価回路を示す図。
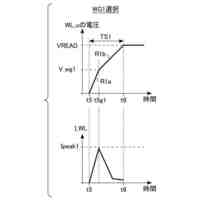
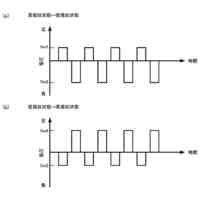
実施形態における回転待ち時間がない場合のVCM電流波形を示す図。
実施形態における回転待ち時間がある場合のVCM電流波形を示す図。
実施形態における回転待ち時間がある場合のVCM電流波形を示す図。
実施形態の第1の変形例における回転待ち時間がある場合のVCM電流波形を示す図。
実施形態の第2の変形例における回転待ち時間がある場合のVCM電流波形を示す図。
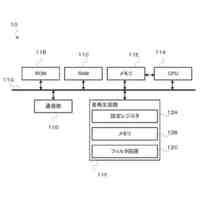
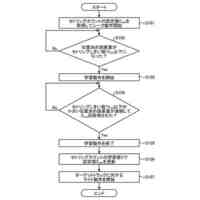
実施形態の第3の変形例におけるJITシーク制御部の機能構成を示す図。
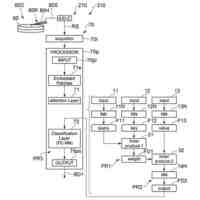
実施形態の第3の変形例におけるサーボ制御部の機能構成を示す図。
実施形態の第4の変形例におけるJITシーク制御部の機能構成を示す図。
実施形態の第4の変形例におけるサーボ制御部の構成を示す図。
実施形態の第5の変形例におけるJITシーク制御部の機能構成を示す図。
実施形態の第5の変形例におけるサーボ制御部の構成を示す図。
実施形態の第6の変形例におけるJITシーク制御部の機能構成を示す図。
実施形態の第6の変形例におけるサーボ制御部の構成を示す図。
【発明を実施するための形態】
【0007】
以下に添付図面を参照して、実施形態にかかるディスク装置を詳細に説明する。なお、この実施形態により本発明が限定されるものではない。
【0008】
(実施形態)
実施形態にかかるディスク装置は、モータを有し、そのモータに駆動電力を供給することで、所定の制御動作を実現するが、ディスク装置における消費電力を低減するための工夫が施される。
【0009】
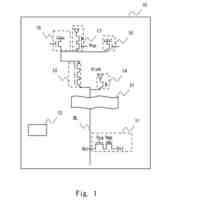
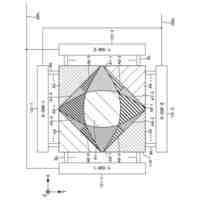
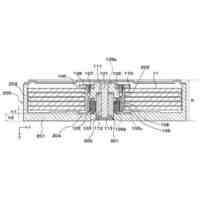
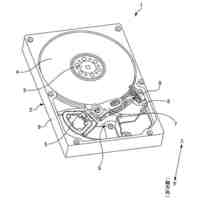
ディスク装置1は、図1に示すように、ヘッドディスクアセンブリ(HDA)10、モータドライバ20、ヘッドアンプ30、コントローラ3、揮発性メモリ70、バッファメモリ80、不揮発性メモリ90を有する。図1は、ディスク装置1の構成を示す図である。コントローラ3は、リードライトチャネル(RWC)40、マイクロプロセッサユニット(MPU)50、ハードディスクコントローラ(HDC)60を有する。
【0010】
HDA10は、ケース10a、ヘッドH、アームAM、ディスクDK、スピンドルモータ12、ボイスコイルモータ(VCM)13、軸受14、筐体HSを有する。筐体HSは、下ケースHSa及び上ケースHSb(図示せず)が嵌合される。ヘッドH、アームAM、ディスクDK、スピンドルモータ12、ボイスコイルモータ(VCM)13、軸受14は、筐体HS内に収容される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
光情報装置、及び光情報制御方法
17日前
ルネサスエレクトロニクス株式会社
記憶装置
1か月前
ルネサスエレクトロニクス株式会社
半導体記憶装置
22日前
ローム株式会社
半導体装置
9日前
キオクシア株式会社
記憶装置
9日前
キオクシア株式会社
記憶装置
10日前
キオクシア株式会社
半導体記憶装置
10日前
キオクシア株式会社
メモリデバイス
15日前
キオクシア株式会社
半導体記憶装置
11日前
キオクシア株式会社
メモリシステム
16日前
キオクシア株式会社
半導体記憶装置
15日前
ソフトバンクグループ株式会社
システム
5日前
ソフトバンクグループ株式会社
システム
4日前
キオクシア株式会社
記憶装置及び記憶装置の制御方法
10日前
ローム株式会社
音再生マイクロコントローラ
5日前
有限会社フィデリックス
カートリッジのカンチレバーとスタイラスの接合構造
24日前
キオクシア株式会社
テスト装置及びテスト方法
15日前
キオクシア株式会社
メモリシステムおよびその制御方法
17日前
株式会社東芝
磁気ディスク装置
4日前
日本発條株式会社
ディスク装置用サスペンション
4日前
キオクシア株式会社
半導体記憶装置及びメモリシステム
10日前
キオクシア株式会社
メモリシステム及びメモリデバイス
1か月前
株式会社東芝
情報処理装置、磁気記録再生装置及び磁気記録再生システム
16日前
株式会社レゾナック・ハードディスク
磁気記録媒体及び磁気記憶装置
17日前
株式会社東芝
磁気ディスク装置
10日前
株式会社東芝
ディスク装置
15日前
株式会社東芝
ディスク装置
10日前
株式会社東芝
ディスク装置
9日前
ミネベアミツミ株式会社
ランプ機構及びハードディスク駆動装置
17日前
株式会社東芝
ディスク装置
9日前
浙江工業大学
二重らせん構造の録音と再生のためのスケジューリング方法
9日前
株式会社東芝
磁気ディスク装置
10日前
株式会社東芝
磁気ディスク装置
8日前
株式会社東芝
磁気ディスク装置
9日前
ルネサスエレクトロニクス株式会社
不良解析装置および不良解析方法
2日前
株式会社東芝
磁気記録再生装置
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ