TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044769
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023152535
出願日
2023-09-20
発明の名称
磁気ディスク装置
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G11B
5/596 20060101AFI20250326BHJP(情報記憶)
要約
【課題】位置決め精度が高い磁気ディスク装置を提供すること。
【解決手段】磁気ディスク装置のコントローラは、第1バーストパターンのリード波形である第1リード波形および第2バーストパターンのリード波形である第2リード波形を復調することによって、第1リード波形の第1振幅および第1位相と、第2リード波形の第2振幅および第2位相とを取得する。コントローラは、第1振幅、第2振幅、第1位相、および第2位相に基づいて重みを取得する。コントローラは、重みと、第1位相と、第2位相と、を用いた重み付け平均の計算によって第1リード波形および第2リード波形の初期位相を補正し、補正の後の第1リード波形および第2リード波形に基づいて磁気ヘッドの位置決めを実行する。
【選択図】図8
特許請求の範囲
【請求項1】
円周方向に複数のサーボセクタが設けられ、前記複数のサーボセクタのそれぞれには第1バーストパターンと第2バーストパターンとが記録された、磁気ディスクと、
前記磁気ディスクに対してライトおよびリードを実行する磁気ヘッドと、
前記複数のサーボセクタのうちの一である第1サーボセクタ上を前記磁気ヘッドが通過する際に、
前記第1バーストパターンおよび前記第2バーストパターンのリードタイミングを特定し、
前記第1サーボセクタから前記第1バーストパターンおよび前記第2バーストパターンを前記リードタイミングにリードし、
前記第1バーストパターンのリード波形である第1リード波形および前記第2バーストパターンのリード波形である第2リード波形を復調することによって、前記第1リード波形の第1振幅および第1位相と、前記第2リード波形の第2振幅および第2位相とを取得し、
前記第1振幅、前記第2振幅、前記第1位相、および前記第2位相に基づいて重みを取得し、
前記重みと、前記第1位相と、前記第2位相と、を用いた重み付け平均の計算によって得た初期位相補正値を基に、前記第1リード波形および前記第2リード波形の初期位相を補正し、
前記初期位相の補正の後の前記第1リード波形および前記第2リード波形に基づいて前記磁気ヘッドの位置決めを実行する、
コントローラと、
を備える磁気ディスク装置。
続きを表示(約 2,100 文字)
【請求項2】
前記第1バーストパターンおよび前記第2バーストパターンは、複数の第1単位パターンと複数の第2単位パターンとを備え、半径方向および円周方向のそれぞれに第1単位パターンと第2単位パターンとが交互に配置された構成を有し、
第1境界の半径方向の位置と第2境界の半径方向の位置とは互いに異なり、前記第1境界は前記第1バーストパターンにおける半径方向の第1単位パターンと第2単位パターンとの境界であり、前記第2境界は前記第2バーストパターンにおける半径方向の第1単位パターンと第2単位パターンとの境界であり、
前記重みは、前記第1位相に適用される第1重みと、前記第2位相に適用される第2重みと、を含み、
前記コントローラは、
前記磁気ヘッドが前記第1境界上または前記第2境界上を通過したか否かを前記第1位相および前記第2位相に基づいて判定し、
前記磁気ヘッドが前記第1境界上を通過したと判定された場合には前記第1重みを0に設定し、前記磁気ヘッドが前記第2境界上を通過したと判定された場合には前記第2重みを0に設定する、
請求項1に記載の磁気ディスク装置。
【請求項3】
前記コントローラは、
前記磁気ヘッドが前記第1境界および前記第2境界のいずれの上も通過していないと判定された場合には、前記第1重みと前記第2重みとを前記第1振幅と前記第2振幅とに基づいて取得する、
請求項2に記載の磁気ディスク装置。
【請求項4】
前記コントローラは、
前記第1位相と前記第2位相との差分の絶対値が第1しきい値より大きい場合、前記磁気ヘッドが前記第1境界上または前記第2境界上を通過したと判定し、
前記絶対値が前記第1しきい値より小さい場合、前記磁気ヘッドが前記第1境界および前記第2境界のいずれの上も通過していないと判定する、
請求項2に記載の磁気ディスク装置。
【請求項5】
前記コントローラは、
前記絶対値が前記第1しきい値より大きい場合において、
前記第1振幅を二乗した値が前記第2振幅を二乗した値よりも小さい場合、前記磁気ヘッドが前記第1境界上を通過したと判定し、
前記第1振幅を二乗した値が前記第2振幅を二乗した値よりも大きい場合、前記磁気ヘッドが前記第2境界上を通過したと判定する、
請求項4に記載の磁気ディスク装置。
【請求項6】
前記コントローラは、
前記絶対値が前記第1しきい値より小さい場合において、
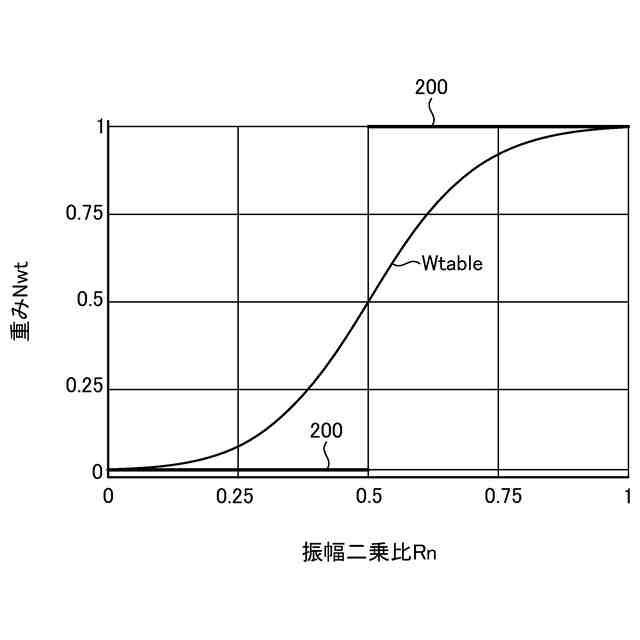
前記第1振幅を二乗した値を前記第1振幅を二乗した値と前記第2振幅を二乗した値との和で除算して得られる比率が1に近いほど前記第1重みが1に近づき前記第2重みが0に近づき、前記比率が0に近いほど前記第1重みが0に近づき前記第2重みが1に近づく、ように前記比率と前記重みとの関係を規定する重み関係情報を用いて前記第1重みおよび前記第2重みを取得する、
請求項4に記載の磁気ディスク装置。
【請求項7】
前記コントローラは、
前記第1振幅を二乗した値を前記第1振幅を二乗した値と前記第2振幅を二乗した値との和で除算して得られる比率と前記第1重みおよび前記第2重みとの関係を規定する重み関係情報が設定され、
前記第1位相と前記第2位相との差分の絶対値に基づいた重み関係情報と、前記第1振幅と、前記第2振幅とに基づいて前記第1重みおよび前記第2重みを取得する、
請求項2に記載の磁気ディスク装置。
【請求項8】
前記重み関係情報は、
前記比率と前記第1重みおよび前記第2重みとの関係を規定する複数の第1重み関係情報を有し、前記位相差の絶対値に基づき前記複数の第1重み関係情報のうちの1つを選択可能に構成されている、
請求項7に記載の磁気ディスク装置。
【請求項9】
前記複数の第1重み関係情報は、
前記比率が0から1までの範囲のうちの0に近い第1範囲に含まれる場合に前記第1重みが0、前記第2重みが1に設定され、前記比率が0から1までの範囲のうちの1に近い第2範囲に含まれる場合において前記第1重みが1、前記第2重みが0に設定されるよう前記比率と前記重みとの関係が規定された第2重み関係情報を含む、
請求項8に記載の磁気ディスク装置。
【請求項10】
前記複数のサーボセクタは、第2サーボセクタと第3サーボセクタとを含み、
前記第2サーボセクタは、前記第1バーストパターンおよび前記第2バーストパターンに加えてサーボマークが記録され、
前記第1サーボセクタは前記第3サーボセクタに該当し、
前記コントローラは、前記第2サーボセクタにおいて前記サーボマークを検出したタイミングに基づいて前記リードタイミングを特定する、
請求項1から請求項9の何れか一項に記載の磁気ディスク装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本実施形態は、磁気ディスク装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
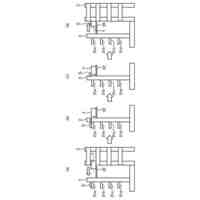
磁気ディスク装置では、磁気ディスク上のサーボセクタに磁気ヘッドの位置決めに使用されるバーストパターンが記録されている。また、近年は、磁気ディスク装置の大容量化の実現のため、円周方向において2つの通常のサーボセクタ(以降、ノーマルサーボセクタと表記する)の間に1以上のショートサーボセクタが配置された磁気ディスク装置が存在する。ショートサーボセクタは、ノーマルサーボセクタよりも円周方向の長さが短いサーボセクタである。
【0003】
ノーマルサーボセクタにはバーストパターンの他に、サーボマークと称されるデータが記録されている。ノーマルサーボセクタでは、バーストパターンをリードするタイミングを示すバーストゲートがサーボマークに基づいて生成される。しかしながら、ショートサーボセクタでは、サーボマークを使用することなくバーストゲートが生成される。よって、ショートサーボにおいて、バーストパターンのリードタイミングが正規(proper)のタイミングからずれることによって、位置決め精度が悪化する場合がある。
【先行技術文献】
【特許文献】
【0004】
米国特許第10748569号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
一つの実施形態は、位置決め精度が高い磁気ディスク装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
一つの実施形態によれば、磁気ディスク装置は、磁気ディスクと、磁気ヘッドと、コントローラと、を備える。磁気ディスクは、円周方向に複数のサーボセクタが設けられ、複数のサーボセクタのそれぞれには第1バーストパターンと第2バーストパターンとが記録されている。磁気ヘッドは、磁気ディスクに対してライトおよびリードを実行する。コントローラは、複数のサーボセクタのうちの一つである第1サーボセクタ上を磁気ヘッドが通過する際に、下記の動作を実行する。即ち、コントローラは、第1バーストパターンおよび第2バーストパターンのリードタイミングを特定し、第1サーボセクタから第1バーストパターンおよび第2バーストパターンを特定されたリードタイミングにリードする。コントローラは、第1バーストパターンのリード波形である第1リード波形および第2バーストパターンのリード波形である第2リード波形を復調することによって、第1リード波形の第1振幅および第1位相と、第2リード波形の第2振幅および第2位相とを取得する。コントローラは、第1振幅、第2振幅、第1位相、および第2位相に基づいて重みを取得する。コントローラは、重みと、第1位相と、第2位相と、を用いた重み付け平均の計算によって得た初期位相補正値を基に、第1リード波形および第2リード波形の初期位相を補正する。コントローラは、初期位相の補正の後の第1リード波形および第2リード波形に基づいて磁気ヘッドの位置決めを実行する。
【図面の簡単な説明】
【0007】
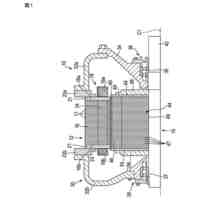
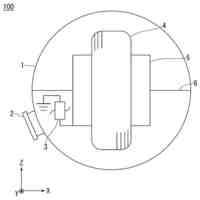
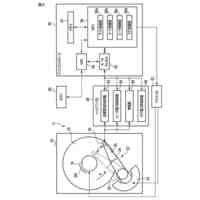
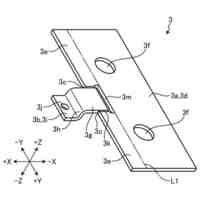
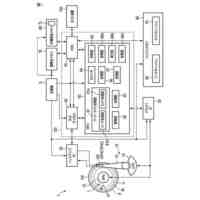
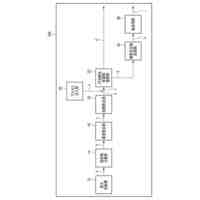
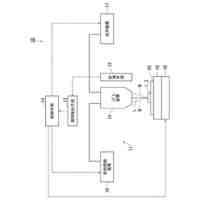
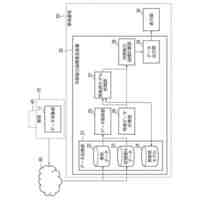
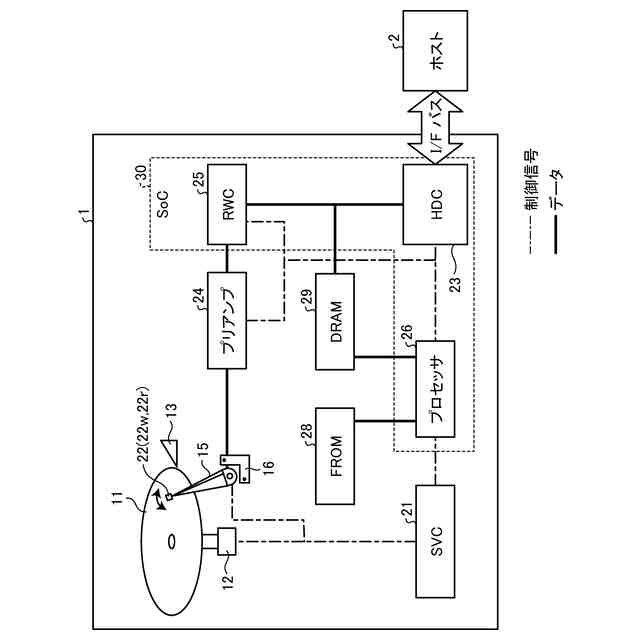
図1は、第1の実施形態にかかる磁気ディスク装置の構成の一例を示す模式的な図である。
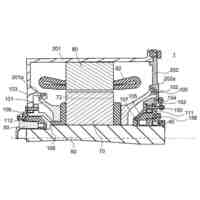
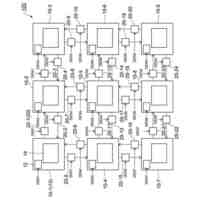
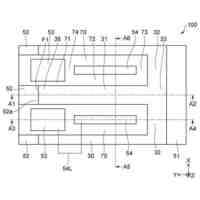
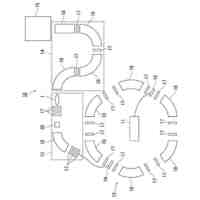
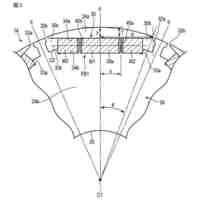
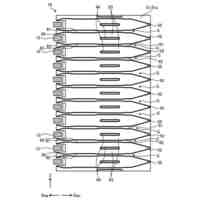
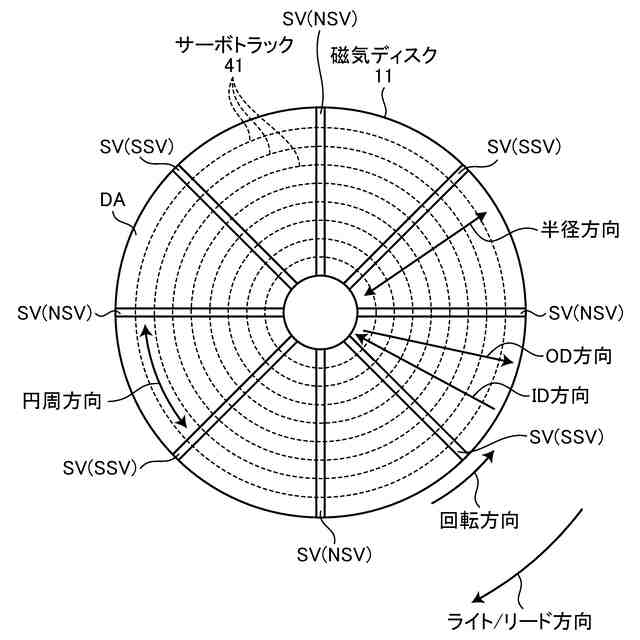
図2は、第1の実施形態にかかる磁気ディスクの構成の一例を示す模式的な図である。
図3は、第1の実施形態にかかるノーマルサーボセクタおよびショートサーボセクタの構成の一例を示す図である。
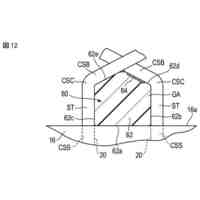
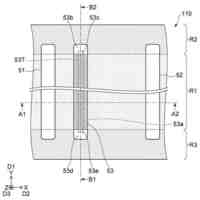
図4は、第1の実施形態にかかるNバーストNBおよびQバーストQBの構成の一例を示す図である。
図5は、第1の実施形態にかかる初期位相動作について説明するための図である。
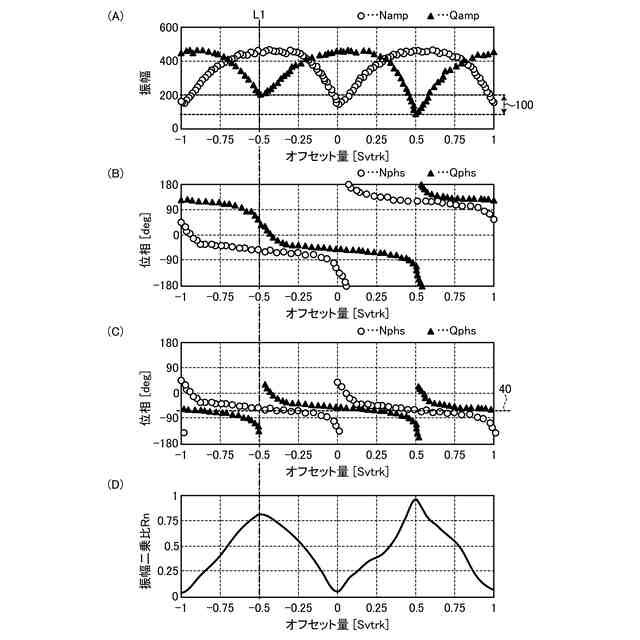
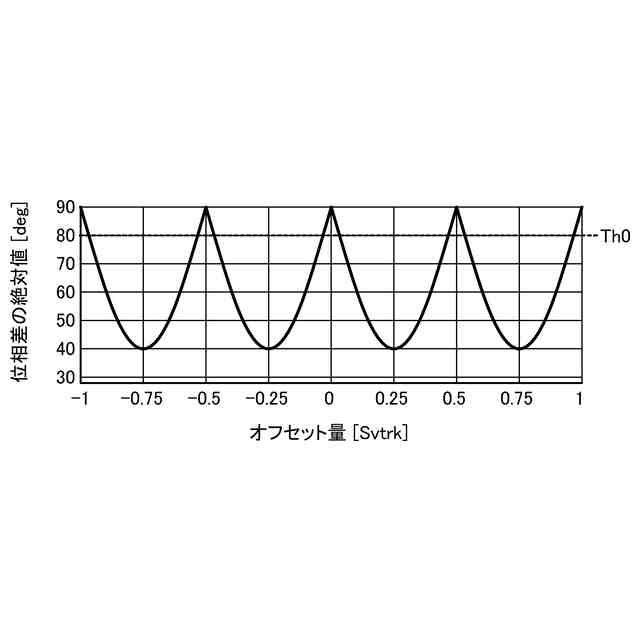
図6は、トラックセンタからのオフセット量と、位相差の絶対値と、の関係の一例を示す図である。
図7は、第1の実施形態にかかる重みの決定方法の一例を示す図である。
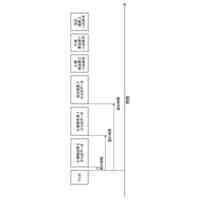
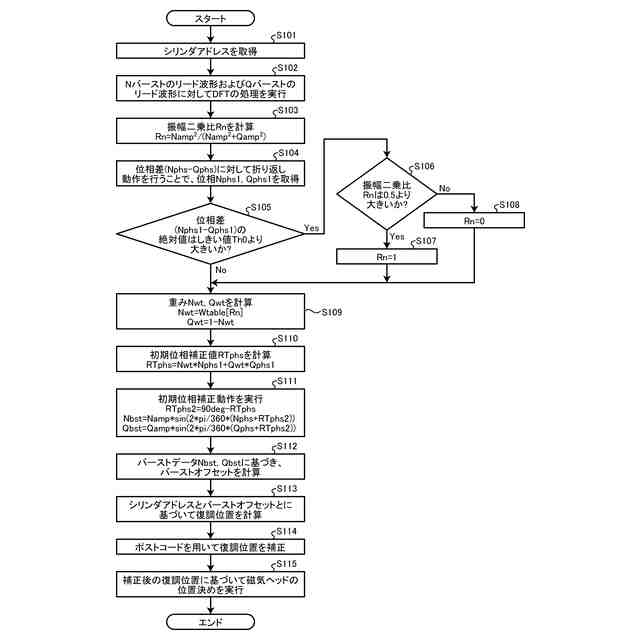
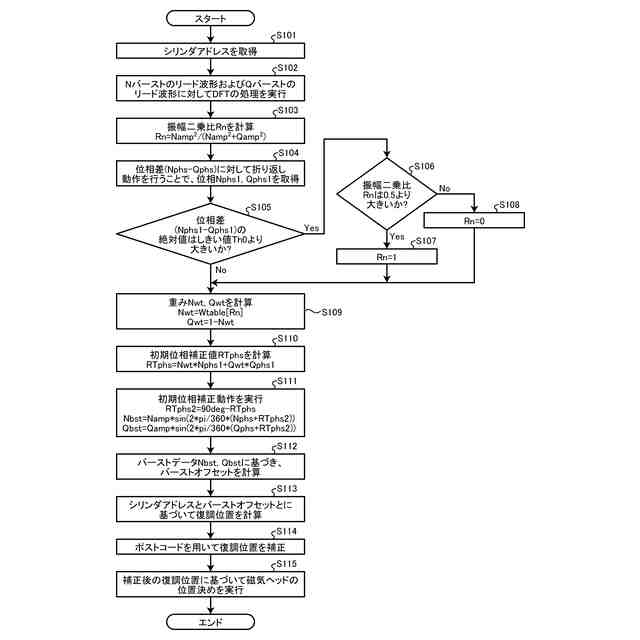
図8は、第1の実施形態にかかる位置決め制御の動作の一例を示すフローチャートである。
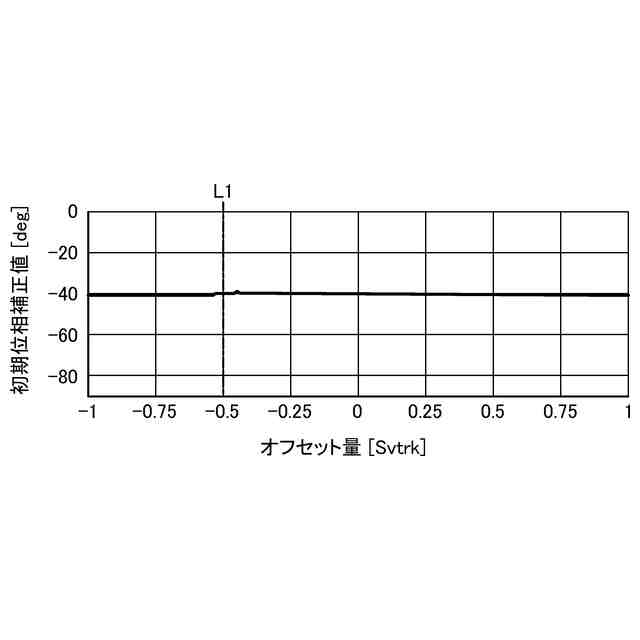
図9は、図8に示された一連の動作によって得られる初期位相を示す図である。
図10は、第2の実施形態にかかる複数の重みテーブルの選択方法の一例を説明するための図である。
図11は、第2の実施形態にかかる複数の重みテーブルの構成の一例を示す図である。
図12は、第2の実施形態にかかる位置決め制御の動作の一例を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下に添付図面を参照して、実施形態にかかる磁気ディスク装置を詳細に説明する。なお、これらの実施形態により本発明が限定されるものではない。
【0009】
(第1の実施形態)
図1は、第1の実施形態にかかる磁気ディスク装置1の構成の一例を示す模式的な図である。
【0010】
磁気ディスク装置1は、ホスト2に接続される。磁気ディスク装置1は、ホスト2からアクセスコマンドを受信することができる。アクセスコマンドは、例えば、ライトコマンドやリードコマンドである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
28日前
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
立て看板
12日前
株式会社東芝
制御装置
14日前
株式会社東芝
回転電機
1か月前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
12日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
1か月前
株式会社東芝
半導体装置
20日前
株式会社東芝
半導体装置
18日前
株式会社東芝
情報表示装置
1か月前
株式会社東芝
車両システム
1か月前
株式会社東芝
静止誘導電器
1か月前
株式会社東芝
スイッチギヤ
1か月前
株式会社東芝
区分システム
19日前
株式会社東芝
静止誘導電器
1か月前
株式会社東芝
スイッチギヤ
7日前
株式会社東芝
ディスク装置
11日前
株式会社東芝
電力変換装置
1か月前
株式会社東芝
粒子線治療装置
1か月前
株式会社東芝
電池モジュール
1か月前
株式会社東芝
磁気ディスク装置
20日前
株式会社東芝
物品区分システム
今日
株式会社東芝
X線厚み測定装置
28日前
株式会社東芝
回転電機の回転子
1か月前
株式会社東芝
有機物分解システム
25日前
株式会社東芝
空転・滑走学習装置
1か月前
株式会社東芝
積層造形装置及び方法
1か月前
株式会社東芝
組電池および通電部材
21日前
株式会社東芝
固定子および回転電機
1日前
株式会社東芝
冷房能力指標推定装置
29日前
株式会社東芝
ディスク装置及びランプ
22日前
株式会社東芝
コンテナバッグ用かご装置
今日
株式会社東芝
蓄熱システム及び蓄熱方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ